
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
121 - 140 / 225
車両の障害物検知装置
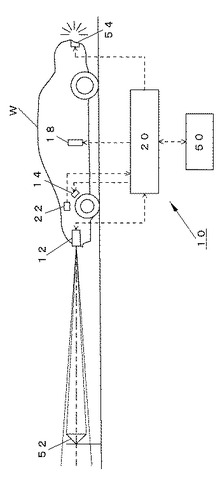
【課題】 停車中の車両からの障害物を検知するための電波の発生を抑制する。
【解決手段】 本発明は、所定の強度の電波を発信して車両W前方の障害物を検知するレーダ装置12と、レーダ装置12からの障害物検知情報に基づいて車両Wの作動機器14、18を制御する作動機器制御手段20とを備えた車両の障害物検知装置10であって、車両Wの車速を測定する車速測定手段22と、車両Wが検査状態であることを検知する検査状態検知手段20と、レーダ装置12から発信される電波の強度を制御する電波強度制御手段20とを有する。電波強度制御手段20は、車速測定手段22によって測定された車速が所定の車速値以下であって検査状態検知手段20が車両の検査状態を検知していないとき、レーダ装置12から発信される電波の強度を所定の強度以下に制御するように構成されているまたは前記レーダ装置12の電波の発信を停止させるように構成されている。
(もっと読む)
レーダ装置

【課題】所定条件下で送信出力を停止又は低下させるレーダ装置において、送信出力の停止又は低下の判定可能で、さらには確実に停止又は低下させるレーダ装置を提供する。
【解決手段】電磁波を送信する送信手段と、送信電磁波の目標物体で反射された電磁波を受信する受信手段と、送信電磁波及び受信電磁波に基づき少なくともレーダ装置と目標物体との間の距離を測定する目標物体測定手段と、所定条件下において送信手段の送信出力を停止又は低下させる送信出力制御手段S1,S2と、送信出力停止又は低下時にも係わらず、予め設定されたしきい値を超える強度の受信電磁波を受信している場合に送信出力制御手段を異常と判定する送信出力制御機能異常判定手段S3〜S6と、異常判定された時にレーダ装置の電源を停止させる異常判定時処理手段S7を備える。
(もっと読む)
車両制御装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 レーダー装置で検知した先行車との車間距離が所定値以下になると自動制動を行ったり運転者に警報を発したりして衝突の発生を防止するものにおいて、先行車のような移動物を検知するための、レーザーレーダー装置やパルスレーダー装置のようなレーダー装置の反射波の受信レベルの閾値(実線で示す移動物用検知閾値)に対し、停止物を検知するための反射波の受信レベルの閾値(破線で示す停止物用検知閾値)を所定の領域で高く設定する。これにより、自車の障害とならないゲートや路上落下物を検知して障害物であると誤認するのを防止し、ゲートや路上落下物に対して必要のない自動制動や警報が行われるのを防止することができる。
(もっと読む)
車載用レーダシステム
【課題】車両の速度が速かったり、旋回半径Rが小さい場合、車載用のレーダ装置のレーダ視野角が狭くなり、レーダ装置の追従性能が低下して障害物の補足が困難となる。
【解決手段】車載用のレーダ装置1と、AFS(適応型照明システム)の照明装置2とを備えた車載用レーダシステムにおいて、レーダ装置1に、照明装置2の照射方向であるスイブル角度に基づいて、レーダ装置1の走査範囲の偏向角度を制御する制御手段16を設け、例えばカーブ走行下でレーダの検出性能が低下することを軽減するようにした。
(もっと読む)
車両周辺の解析方法
車両周辺の解析方法は、車両周辺の物体に関するデータを収集する工程と、そのデータを解析して車両周辺の空きスペース領域を決定する工程と、空きスペース領域の少なくとも一部を示す1つ以上のシグネチャを作成する工程と、そして後の検索用にシグネチャを保存する工程とを含む。  (もっと読む)
(もっと読む)
車両の障害物検知装置
【課題】物標の位置をより正確に予測することができる障害物検知装置の提供。
【解決手段】自車両前方の物標を検知する障害物検知手段11と、検知物標の情報を受け、自車両の作動機器を制御する作動機器制御手段12とを備え、障害物検知手段11は、所定のサンプリング時間ごとに、物標のまでの距離と、物標との相対速度と、物標の方角とを含む物標データを抽出する物標データ抽出部111と、物標データに基づいて、次回のサンプリング時の物標位置を予測する物標位置予測部112と、検知物標の位置と予測物標の位置とを照合し、同一物標を識別する物標識別部113とを有し、物標データ抽出部111は、物標の横方向の速度成分を更に求め、物標位置予測部112は、相対速度とともに横方向の速度成分を使用して、物標の位置を予測する。
(もっと読む)
車載用周波数変調レーダ装置
【課題】観測時間の増加をともなうビート周波数の周波数分解能の向上を行うことなく、雑音の影響を抑制し、かつ雑音による誤推定を回避して精度よく高速にビート周波数が得られる車載用周波数変調レーダ装置を得る。
【解決手段】ピーク信号の周波数fnに周波数補正量δを加算して、補正後の周波数fn+δを算出する周波数補正手段S22と、補正後の周波数fn+δに基づいて目標物体までの距離または相対速度を演算するCPUとを備えている。FFT演算部において、窓関数の性質に基づいて真のピーク信号の周波数ftを算出し、算出結果に基づいて誤推定と判定される場合は真のピーク信号の周波数をさらに補正する。
(もっと読む)
走行制御装置
【課題】運転者による制御開始設定操作を頻発させないようにする。
【解決手段】制御対象決定部34は、制御対象領域第2設定部33により設定された制御対象領域内でレーダ装置15により検出された物体の中から自車両の制御対象とすべき先行車両を決定し、この先行車両が制御対象領域から外れた場合に制御対象から解除する。走行制御装置1は、制御対象決定部34により制御対象に決定された先行車両が制御対象を解除されたときには走行制御を停止し、制御対象解除から解除猶予時間が経過するまでに制御対象とすべき物体が決定されたときには走行制御を自動復帰する。先行車両が制御対象から解除された後の自車両の移動方位が、制御対象解除時の先行車両の移動方位に接近している場合に、制御対象領域を制御対象解除時の先行車両の移動方位寄りに拡大補正する。
(もっと読む)
車両の走行制御装置
【課題】車両の走行制御において、特に制動時により制動距離を短くし、かつそのときにスピンを防止するためには、車両運動を表す前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測し、各車輪の制動力と各懸架のショックアブソーバの減衰係数を制御する必要がある。このとき、速度や角度を直接計測するセンサを装備する必要がある。
【解決手段】前後速度と左右速度を直接計測するために4つのレーダセンサを使用する。また、上下速度,ピッチ角,ロール角,横すべり角をレーダセンサの出力から間接的に計測。
【効果】3個または4個のレーダセンサを用いることにより、前後速度と左右速度,上下速度,ピッチ角,ロール角,横すべり角の6個の物理量を計測できる。また、2個のレーダセンサを用いることにより、前後速度と左右速度,横すべり角の3個の物理量を計測できる。
(もっと読む)
車載レーダ装置
【課題】車両に搭載される車載レーダ装置に関し、前方車両の検出漏れを防止し、且つ障害物を車両と認識するのを防止する。
【解決手段】車載レーダ装置(1)が、自車に対する物体の相対角度検出範囲を3つ以上の領域に分割し、カーブや、一般/高速道路の別等の道路情報、自車の走行速度、更には、天候による路面状況の変化等、車両の置かれた具体的な走行環境に応じて、各領域に、適切な閾値を設定する信号処理部(19)を有する。同一車線の前方を走行中の車両と、障害物とを区別して検出を行うことを可能とし、障害物の検出漏れを引き起こすことを防ぐことを可能にする。
(もっと読む)
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
(もっと読む)
割込車両判定装置
【課題】誤判定をより減少させた割込車両判定装置を提供する。
【解決手段】ACCシステム1はミリ波センサ10、ステレオカメラ11、アクセルペダル12、車速センサ13等のセンサ類と、先行車選択部20と、割込車両判断部30と、走行制御ユニット40と、ブザー51等の制御対象とを備えて構成されている。先行車選択部20が、先行車両が入替わったと判定したときは、割込車両判断部30は通常より割込車両判定を行う閾値を高くして判定を行う。これにより、誤判定をより減少させることができる。
(もっと読む)
レーダ装置
【課題】物体までの距離や物体とレーダ装置との相対速度が変化する環境においても、波数推定を正確に行うレーダ装置を提供する。
【解決手段】電波を送信する送信部と、電波を受けた物体から反射される電波を受信する複数のアンテナと、複数のアンテナから供給される受信信号に応じて、物体に反射される電波の反射波強度の角度スペクトラムを算出し、角度スペクトラムにおいて設定される閾値を越える部分をカウントすることにより到来する電波の波数を推定し、推定された波数と複数のアンテナから供給される受信信号とに応じて、測角方法を用いて物体の存在する方向を判定する信号処理部とを有するレーダ装置であって、信号処理部は、複数のアンテナから供給される受信信号に応じて、電波を反射する物体までの距離を算出し、算出された距離に応じて閾値を設定する。
(もっと読む)
車両制御装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 レーダー装置で検知した先行車との車間距離が所定値以下になると自動制動を行ったり運転者に警報を発したりして衝突の発生を防止するものにおいて、先行車のような移動物を検知するためのレーダー装置の反射波の受信レベルの閾値(実線で示す移動物用検知閾値)に対し、停止物を検知するための反射波の受信レベルの閾値(破線で示す停止物用検知閾値)を所定の領域で高く設定する。これにより、自車の障害とならないゲートや路上落下物を検知して障害物であると誤認するのを防止し、ゲートや路上落下物に対して必要のない自動制動や警報が行われるのを防止することができる。
(もっと読む)
レーダ装置、及び、到来方向推定装置
【課題】物体の方向決定を、物体が一つの構成要素で構成されている可能性の高い場合は迅速に、物体が複数の構成要素で構成されている可能性の高い場合は正確に行うレーダ装置を提供する。
【解決手段】電波を物体に送信する送信部と、物体に反射される電波を受信する複数のアンテナと、複数の受信信号に基づいて、物体に反射される電波の到来方向を推定する測角方法を用いる信号処理部とを有するレーダ装置であって、信号処理部は、第一の測角方法を用いて物体からの電波の到来方向を推定し、推定された電波の角度分布に基づいて物体の幅を算出し、算出された物体の幅が所定の幅以上であるかを判定し、物体の幅が所定の幅以上である場合に、第一の測角方法より角度分解能の高い第二の測角方法を用いて物体からの前記電波の方向を推定する。
(もっと読む)
車両用物体検出装置
【課題】物体の連続性を高精度に判定可能な物体検出装置を提供する。
【解決手段】物体の位置および速度を物体データとして検出するレーダ装置15と、レーダ装置15により前回検出された物体データに基づいて今回検出時の物体の位置を予測し、予測された位置を含むトラッキングエリア内に物体が検出された場合に前回検出された物体データと今回検出された物体データとの間に連続性があると判定するトラッキング処理部35と、レーダ装置15により前回検出された物体データおよび今回検出された物体データに基づいて物体の横移動量を算出する横移動量算出部33と、運転者の加速抑制意志または減速意志を検出する運転意志判断部34と、を備え、横移動量算出部33により算出された物体の横移動量が所定値以上であり且つ運転意志判断部34により運転者の加速抑制意志または減速意志が検出された場合にトラッキングエリアを変更する。
(もっと読む)
物体検出装置、衝突予測装置、及び車両制御装置
【課題】障害物の横方向の変位(方位)に関する信頼度を算定することが可能な物体検出装置、及びこれを利用した衝突予測装置並びに車両制御装置を提供すること。
【解決手段】周辺物体を検出する物体検出装置であって、周辺物体までの距離及び方位を検出する第1の検出手段10と、周辺物体までの距離及び方位を検出する第2の検出手段20と、第1の検出手段10及び第2の検出手段20の検出結果に基づいて、周辺物体の方位に関する信頼度を算定する、信頼度算定手段と、を備え、周辺物体までの距離及び方位と共に、周辺物体の方位に関する信頼度を出力することを特徴とする。
(もっと読む)
物体検出装置
【課題】受信波の電波強度が低い物体を検出する際でも、誤検出が少なく、一旦検出した物体をロストし難い物体検出装置を提供する。
【解決手段】ACCシステム1は、ミリ波レーダ10と、ステレオカメラ11と、これらの検出状態を示す物体種別情報を求める先行車認識ECU20と、物体パラメータおよび物体種別情報に基づいてブレーキアクチュエータ40や電子制御式スロットルバルブ41などを制御する走行制御ECU30とを備える。ミリ波レーダ10が低閾値で検出した物体については、ステレオカメラ11でも検出された物か、過去にミリ波レーダ10が高閾値で検出した物体を先行車候補とする。これにより、受信波の電波強度が低い物体を検出する際でも、誤検出が少なく、一旦検出した物体をロストし難い。
(もっと読む)
物体検知装置
【課題】レーダ装置を用いて先行車などの物体を検知すると共に、より簡易な構成で虚像を実際の物体(実像)と誤認するのを防止する物体検知装置を提供する。
【解決手段】検知された第1の物体(物体104)と車両(自車)10の間に第2の物体(物体102)が検知されると共に、検知された第1の物体の相対距離r1+r2が検知された第2の物体の相対距離r1の整数倍(例えば2倍)であり、車両の移動速度v1,v1’と検知された第1の物体の移動速度(相対速度)v2,v2’が等しく、かつ検知された第1の物体の相対角度が同一(θ1=θ2)であるとき、検知された第1の物体は虚像であると判定する。
(もっと読む)
車両用物体検知装置
【課題】自車の進行方向に存在する物体が霧などの不規則に形状が変化し、自車が回避する必要のない気体状の物体か否か精度良く判別する車両用物体検知装置を提供する。
【解決手段】進行方向に搬送波を送信し、進行方向に存在する物体に反射させて得た反射点を2次元平面に投影して得た点群の分布を検出し(S12)、投影して得た点群の分布と予め設定された点群分布パターンを備えるテンプレートの点群分布パターンとの相関値Tを算出し(S14)、算出された相関値に基づいて前記物体の形状の不規則度を表わす評価値Eを算出し(S16)、算出された評価値に基づいて物体が回避する必要のない不規則形状物体か否か判別する(S18からS22)。
(もっと読む)
121 - 140 / 225
[ Back to top ]