
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
161 - 180 / 225
車両制御装置

【課題】自車両周辺の物体に対する検知性能の低下判定を適切に行う。
【解決手段】検知性能判定部26は、運転意志検出部23により運転者の減速意志が検出されたタイミングから所定時間以内に、制御対象設定部24により制御対象となる先行車両が新たに設定された場合、つまり先行車両が設定されるタイミングに先立って運転者の減速意志が検出された場合には、レーダ装置11に対して運転者が必要とする所望の検出感度が確保されておらず、検知性能が低下状態であると判定する。
(もっと読む)
停止車両判別装置、自動車及び停止車両判別方法

【課題】高分解能のレーザレーダを用いなくても、自車両前方の物体が停止車両であるか否かを、精度良く判別することができる停止車両判別装置、それを備えた自動車及び停止車両判別方法を提供する。
【解決手段】自車両と自車両前方の停止物との距離Py_z0[i]に基づいて、停止車両判別閾値を設定し、その停止物の横幅objW_z0[i]と停止車両判別閾値とを比較することで、当該停止物が車両であるか否かを判別する。このとき、停止車両判別閾値として上限閾値Th_Width2[i]と下限閾値Th_Width1[i]とを設け、自車両と停止物との距離が遠ざかるほど前記上限閾値を大きく、前記下限閾値を小さくする。
(もっと読む)
自動車両のレーダ方法および自動車両用のレーダ装置
【解決手段】自動車両のレーダ装置(10)がレーダ波を放射して受信し、物体(16)と自動車両との距離が、発信されたレーダ波と受信されたレーダ波との間の周波数シフトから確定され、物体の速度が、受信されたレーダ波の位相位置から確定される、FMCWのレーダ方法が示される。方法は、この方法が、第1の時間区間(T_A、T_B)で、自動車両の周囲(36)の少なくとも1つの第1の部分区域(A,B)にある物体に対して実行され、第2の時間区間(T_C、T_D、T_E、T_F、T_G)で、周囲(36)の少なくとも1つの第2の部分区域(C、
D、E、F、G)にある物体に関して速度ではなく、距離が確定されることを特徴とする。
(もっと読む)
車両用物標判定装置
【課題】 人体露出物標の検出精度を向上させる。
【解決手段】 レーダ装置は、車両の前方に存在し反射強度が閾値th2以下かつ閾値th3以上で距離が所定値Ds以内の弱反射物標を最大m個検出することを周期T2で繰り返すと共に、車両の前方に存在し反射強度が車両検出閾値th1より大きい強反射物標を最大n個検出することを周期T1(T2≪T1)で繰り返し、画像処理装置は、車両の前方を撮像することで得られた画像から路面エッジを除外したエッジを抽出することを繰り返す。レーダ装置から物標情報を受信すると共に画像処理装置からエッジ情報を受信し(110,112)、受信した物標情報が表す個々の弱反射物標の画像上での写像位置にエッジが存在しているか否かに基づいて、個々の弱反射物標の実体の有無を判定し、実体有りと判定する。
(もっと読む)
車載レーダ装置、車両制御システム
【課題】 路側通信装置などのインフラを用いることなく、右折車両,停止車両,前方車両等によって生じる死角の状況を把握するための情報を取得可能な車載レーダ装置、及びその車載レーダ装置を利用した車両制御システムを提供する。
【解決手段】 レーダ波の送受信により自車両前方の物体を検出し、検出された物体の中から監視の対象とすべき対象車両(自車両の前方を走行する前方車両や走行路上の停止車両)、及びその対象車両によって生じる死角に存在する死角物体を抽出する(S110〜S150)。通常モード(対象車両が前方車両)の場合、前前方車両(死角車両)が存在し且つ減速していれば、前前方車両減速フラグをオンに設定し、死角検知モード(対象車両が停止車両)である場合、死角物体が存在していれば、死角物体存在フラグをオンに設定し、これらフラグ情報を対象車両の情報と共にECUに送信する(S160〜S220)。
(もっと読む)
対象を認識して分類する方法および装置
対象を認識して分類する方法と装置であって、その場合にセンサによって電磁的放射が送信されて、対象で反射された部分放射がセンサによって受信され、受信された信号が、格納されている特徴的な値との比較によって評価されて、評価に基づいて反射する対象の分類が推定される。そのために、受信信号を評価するための評価手段が設けられており、特徴的なパターンを格納するためのメモリが設けられており、そのメモリに格納されたパターンが評価された信号と比較されて、比較に基づいて反射する対象の分類を推定することができる。 (もっと読む)
先行車情報取得装置
【課題】自車両と先行車両との接近度合に応じて、先行車の情報取得周期を早くする。
【解決手段】車間距離センサ1は、送出角度を所定角度ずつ変更しながら、所定範囲20内でレーザ光を送出し、レーザ光の送出が左右方向に1往復する間に受光されるレーザ光に基づいて、先行車両の情報を取得する。コントローラ5は、自車両と先行車両との接近度合を検出し、検出した接近度合が高いほど、車間距離センサ1から送出されるレーザ光の送出範囲を狭めて、先行車両の情報取得周期を早くする。
(もっと読む)
レーダ装置
アンテナビームの組み合わせから得られる複数の目標の方向を精度よく分離する。前記複数の方向に放射されたビームのうち、一部が重なり合う少なくとも2つのビームの受信波より前記信号検出器が算出した特徴量の組み合わせから、前記目標の方向である1次方向を算出する方向算出器と、前記方向算出器が算出した1次方向が複数存在する場合に、複数の前記1次方向の分布が所定の密度以上となる領域からその領域に属する1次方向に基づいて真の目標の方向である統合方向を算出する方向統合器を備えた。  (もっと読む)
(もっと読む)
電波レーダ装置及び車間距離制御装置
【課題】2周波CW方式を用いた電波レーダにおいて、相対速度0状態においても、前方車の距離検知を可能とし、安定したACC追従走行を実現する。
【解決手段】2周波CW方式と他の変調方式(周波数パルスCW方式、もしくはFM−CW方式)を組み合わせることで、相対速度がある時は、2周波CW方式、相対速度0付近の状態では周波数パルス方式を混在させて、相対速度0でも前方車の反射波から得られるIF信号を発生させて、ACC対象車両の存在を検知し、安定したACC追従走行を可能とする。
(もっと読む)
レーダ装置
方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の方向を算出し、この方向と前記相対距離と相対速度から前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタと、を備えた。 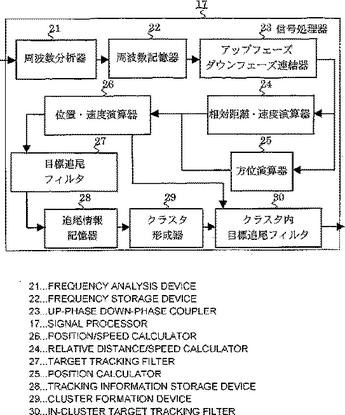 (もっと読む)
(もっと読む)
レーダ装置
【課題】 FMCWレーダ装置において、干渉による影響を抑制し、安定的に、距離を求められるようにする。
【解決手段】 レーダ装置は、上り及び下り変調時の各ビート信号Xnに、干渉波成分を減衰可能な窓関数を作用させる。また、作用後の上り変調時のビート信号Xnから、相関行列Ruを算出すると共に(S310)、行列Ruと、前回算出の相関行列Ru1と、前々回算出の相関行列Ru2とを積算して行列Raを求める。これより、複数サイクル分のビート信号Xnを積算する(S320)。その後、行列RaをDFT処理し(S330)、複数サイクル分の上り変調時のビート信号の積算信号に対応するスペクトルY1を求める。また、下り変調時のビート信号にも、同様の処理を施し、複数サイクル分の下り変調時のビート信号の積算信号に対応するスペクトルY2を求める。そして、スペクトルY1,Y2からビート周波数を特定し、距離を求める。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体が同一物体か否かを判断する判断手段10とを備え、判断手段10は、画像検出手段3によって検出した物体に対してレーダ検出手段2によって検出した物体が複数個対応している場合、当該複数個の物体のうち車両中心の推測走行軌跡に近い物体を同一物体と判断することを特徴とする。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報との関係が判断基準を満たしている場合にレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体と判断する判断手段8とを備え、物体までの距離が長い場合には判断基準を同一物体と判断し易くなるように変更することを特徴とする。
(もっと読む)
物体検出装置
【課題】 検出した物体に高精度な情報を設定できる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、判断手段8で同一物体と判断した物体については、レーダ検出手段2によって検出した当該物体の横方向のデータと画像検出手段3によって検出した当該物体の横方向のデータとの位置関係に基づいて横幅及び/又は横位置の設定方法を変更することを特徴とする。
(もっと読む)
物体検出装置
【課題】 2つの検出手段のうちの一方の検出手段で物体を検出できない場合でも検出対象の物体を設定することができる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいてレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、2つの検出手段2,3の一方の検出手段で過去に同一物体と判断した物体を検出できない場合、当該過去に同一物体と判断した物体に設定された情報から求めた予測移動軌跡と他方の検出手段で検出した物体の位置情報とに基づいて同一物体か否かを判断することを特徴とする。
(もっと読む)
レーダ信号処理装置
【課題】物標からの反射波の距離減衰などに応じて相関行列を適切に推定することの出来るレーダ信号処理装置の提供
【解決手段】物標からの反射波を受信信号S2として受信して、所定の観測信号S3をそれぞれ出力する複数の観測手段OB、各観測信号から、受信アンテナからの距離r1,…,rnに対応した距離成分XRp(r1),…,XRp(rN)を抽出する距離成分抽出手段DS、抽出された各距離成分を集め、それら各距離成分に対応した相関行列推定値Rxxqを、指数平滑型相関行列推定法を用いて各距離成分に対応した忘却係数αをパラメータとする形でそれぞれ演算推定する相関行列推定手段RM、推定された相関行列推定値に基づいて物標の有無又は運動状態を推定する手段OM及び、受信アンテナ5からの距離に対応した忘却係数をそれぞれ演算決定し、相関行列推定手段に、各距離成分に対応した忘却係数として出力する忘却係数決定手段FFを有して構成される。
(もっと読む)
レーダの軸ずれ量決定装置
【課題】 静止物標の分布に基づくレーダの水平方向軸ずれ量決定において、直線走行からカーブ走行に移行する際にも正確に軸ずれ量を決定する。
【解決手段】 検出された静止物標の2次元的な分布のデータおよび直線走行かカーブ走行かを示すフラグを現在から所定時間前まで時系列的に保持することによって(ステップ1002〜1018)、所定時間前の分布データおよびフラグをそれぞれT_Map(4)およびT_Flag(4)として保持する。現在および所定時間前のいずれにおいても直線走行していたと判定されるときのみ(ステップ1020)所定時間前の分布データT_Map(4)をA_Mapに積算し(ステップ1022)、積算値A_Mapに基いて軸ずれ量を演算する(ステップ1026)。
(もっと読む)
レーダ装置
【課題】 本発明は、装置自体の異常を精度良く判定できるレーダ装置を提供する。
【解決手段】 送信されたビームが物標から反射された反射波を受信した反射波信号に基づいて該物標を検出するレーダ信号処理部を備え、該レーダ信号処理部は、静止した物標に係る反射波信号のレベルと基準値との差分値を所定時間積算して求めた積算値と、予め設定された閾値とを比較し、該積算値が該閾値以下であるときに、レーダ装置に異常があると判定する。所定の角度で順次ビームをスキャンして送信するレーダアンテナを有する場合には、レーダ装置自体の異常、例えば、雪や泥の付着などによるレーダアンテナの感度低下を判定でき、誤判定を防止できる。
(もっと読む)
複数の物体の距離及び相対速度の測定のための方法及び装置
時間的に線形の周波数ランプをもつ送信信号を発射し、物体で反射した受信信号を受信して送信信号と混合することによる、FMCWレーダを用いた複数の物体の距離及び相対速度の測定のための方法及び装置。各物体についての各周波数ランプのミキサ出力周波数に対して、距離値と相対速度値との組合せが割り当てられ、距離と相対速度との複数の組合せの交点から、考えられる物体の距離及び相対速度が決定され、その際、考えられる物体は、アンビギュイティのための見せかけの物体、又は現実の物体でありうる。アンビギュイティによる見せかけの物体は、その次の測定サイクルにおいて少なくとも1つの周波数ランプの周波数勾配をランダムに変化させることによって、消去される。 (もっと読む)
先行車認識装置
【課題】 レーダー装置が電磁波を送信および受信する検知エリアの端部における物体の横方向位置の検知精度を簡単な演算で高める。
【解決手段】 レーダー装置は扇形の検知エリアに入った物体からの反射波の中心を物体の位置として検知する。レーダー装置の検知エリアの端部にターゲットの一部だけが入って検知された場合に、その検知位置はターゲットの中央位置であるB位置からずれたA位置になるが、ターゲットである車両の車幅の半分に相当する距離(例えば0.9m)だけ、前記A位置を横方向外側に移動させたB位置をターゲットの検知位置として算出することで、ターゲットの一部だけが検知エリアに入った場合でも、そのターゲットの横位置を正しく算出することができる。
(もっと読む)
161 - 180 / 225
[ Back to top ]