
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
101 - 120 / 225
レーダ装置、及び干渉防止方法
【課題】電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供すること。
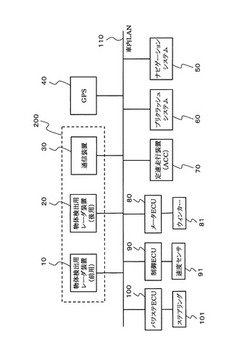
【解決手段】レーダ装置10、20は、目標物に対して送信電波を送信しその反射波を受信して目標物を検出する。通信装置30は他車に搭載されたレーダ装置に関するレーダ装置情報と走行情報を受信する。通信装置30は受信したレーダ装置情報等に基づいて、自車と他車とが近接する場合等、一定の送信電波停止条件を満たすときに、レーダ装置10、20から送信電波の送信を停止させる。また、通信装置30は送信電波を停止後、自車と他車とが近接しなくなった場合等、一定の送信電波再開条件を満たすとき送信電波の送信を再開させる。
(もっと読む)
物体検出装置

【課題】検出時刻が異なる場合でも、物体の同じ部位の位置情報を取得することにより、より精度良く物体の位置情報を導出することができる物体検出装置を提供する。
【解決手段】物体検出装置10において、レーダ14が放射電磁波の反射波に基づいて他車両等200の物体の物標点を検出し、形状推定部26cが、レーダ14が検出した物標点に基づいて他車両200の少なくとも側面と前面とを推定し、位置情報導出部26dが、形状推定部26cが推定した側面と前面とから特定される代表点から他車両200の位置情報を導出する。これによれば、レーダ14の物標点の検出情報から検出誤差の影響を排除した生成情報である他車両200の側面及び前面を推定し、検出誤差を含む物標点そのものではなく、検出誤差に影響されない生成情報を利用するため、他車両200の特定部位の位置情報の時間変化を導出することができる。
(もっと読む)
接近通報用のレーダ波中継装置および表示装置
【課題】見通しの悪い交差点などにおける車両(移動物体)の出会い頭の衝突を防止する。
【解決手段】移動物体からのレーダ波を受信し、受信したレーダ波を当該レーダ波が送信されてきた方向とは異なる方向に変更して送信し、送信したレーダ波の反射波を受信し、受信した該反射波を該移動物体に向けて送信し、該レーダ波を受信したのち、該レーダ波の送信周期と当該レーダ波中継装置1B内の遅延時間とに基づく遅延時間分、該レーダ波についての反射波の送信を遅延させる。
(もっと読む)
物体識別方法及び物体識別装置
【課題】簡易かつ安価な構成で、物体の正確な位置を検知可能とする物体識別方法及び物体識別装置を提供する。
【解決手段】メインローブ照射方向にミリ波ビームを照射すると共に、メインローブ10とサイドローブ11A、11Bで被検知対象物からの反射波を受信するアンテナ4と、アンテナのサイドローブで受信した反射波の反射電力強度を求めるとともに、求めた反射電力強度の単位時間あたりの変化量Pが所定値P1以上の場合には、受信した反射波が被検知対象物からの反射波でないと判断する。
(もっと読む)
信号処理装置及び信号処理方法
【課題】レーダ信号の信号処理装置において、物標の誤検出を防止しつつ、迅速に検出結果を出力する。
【解決手段】信号処理装置は、レーダ装置から複数の角度方向に送信された送信信号と、物標により反射されて前記車載レーダ装置に受信された受信信号から物標の角度方向を検出する物標検出部と、過去に検出された角度方向と今回検出された角度方向との連続性の有無を判定する連続性判定部を有する。そして、前記物標の横位置が所定の範囲内であり、且つ前記所定範囲内の物標数が所定数以下のときは、誤検出の可能性が大きいので連続性の判定回数を多くして誤検出を防止し、それ以外のときは、誤検出の可能性が小さいので連続性の判定回数を少なくして、検出結果をより早く出力できる。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】自車のヨーレートを検出する手段19、自車の車速を検出する手段27、ヨーレートの検出信号および車速の検出信号に基づいて自車進行路の曲率を推定する手段23、自車進行路の車線幅を設定する手段24、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段25、前方車の位置を検出する手段21、前方車の検出位置の距離と角度をパラメータとしてこれらに対応するゲインにより前方車の角度=検出角度×ゲインに補正する手段30、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、を備える。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートセンサおよび車速検出手段の検出信号に基づいて自車の進行方向に沿う曲率を推定する手段23、自車進行路の車線幅を設定する手段24、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段25、前方車の位置を検出する手段21、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、ヨーレートセンサの検出誤差を補正する手段(ヨーレートの検出値=推定曲率に対応するゲイン×ヨーレートの出力値に補正する手段31)、を備える。
(もっと読む)
レーダシステム
【課題】レーダ反射断面積を精度よく演算するレーダシステムを提供する。
【解決手段】本発明は、目標物に向けて電波を送信して、反射してきた電波を受信して信号として出力するレーダ装置18と、前記信号を入力し、前記信号に基づき目標物までの距離と目標物のレーダ反射断面積を演算する演算手段と、前記演算したレーダ反射断面積を前記目標物までの距離に応じて補正する補正手段10を備えたレーダシステムである。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】ヨーレートの検出信号と車速の検出信号とから自車の進行方向に沿う中心線の曲率を推定する手段23、自車の進行方向に沿う曲率とその中心線に与える水平方向の車線幅とから自車進行路の車線形状を設定する手段25、前方車との距離および角度を検出する手段21、自車の進行方向に沿う曲率と前方車との距離に応じて車線形状の水平方向の車線幅を変更する手段(図8のS8)、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、を備える。
(もっと読む)
移動体用物体検出装置
【課題】受信信号の時系列フィルタの構造を複雑にしなくても、十分なS/N比を確保しつつ物体の誤検出を防止できる装置を提供する。
【解決手段】物体検出装置は、レーザ光の発光制御とその反射光の受光制御を行うL/R装置3と、L/R装置3の受信信号から物体を検出する物体検出部とを備えている。物体検出部は、走査範囲を所定数に分割した領域毎に受信信号を積算して領域計測データを記憶する積算データ格納メモリ43と、前記領域計測データを領域毎に記憶する領域計測データ格納メモリ44と、前記領域計測データを時系列フィルタリングしてノイズを除去する時系列処理装置45と、を備えている。また、前記物体検知部は、前記時系列処理装置45で処理された領域計測データのピーク値が前回走査の計測時よりも一定値以上減少しているデータについては、物体検知対象から除き、それ以外のデータについて物体検出を行う物体検出器47とを備えている。
(もっと読む)
物体検出装置
【課題】物体の識別精度が向上した物体検出装置を提供する。
【解決手段】物体に対し電波を送信し反射波の受信強度に基づいて、物体が先行車両であるか否かを識別する物体検出装置1であって、所定の条件下で物体を先行車両と識別した場合に、物体に対し先行車両候補履歴を記録する先行車両履歴記録処理部17と、物体における受信強度が一定時間以上第1閾値以上となっていた後、第1閾値以上でなくなった際に、物体において先行車両履歴が記録されている場合には物体が先行車両であると判断する識別手段と、を備えて構成することで、所定の条件下で物体を先行車両であると識別した場合、物体の識別結果の履歴を記録し、その物体からの反射波の強度が一定時間以上第1閾値以上となっていた後において第1閾値以上でなくなった際に、先行車両の履歴を持つ物体は反射波の強度に関わらず先行車両候補として識別することができる。
(もっと読む)
車載用レーダシステム
【課題】角度確定可能範囲外であっても反射波を受信可能な領域に存在するターゲットに対応することができる車載用レーダシステムを提供する。
【解決手段】電波を送信する送信してターゲットから反射される電波を受信し、得られたターゲット信号からターゲットの距離、相対速度及び方位角度を算出し、ターゲットの方位角度は、所定の角度確定範囲において算出可能であり、ターゲット信号からターゲットが前記角度確定範囲内かどうかを判定して、前記角度確定範囲内にターゲットがあると判定した場合、ターゲットの距離、相対速度及び方位角度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定し、前記角度確定範囲外にターゲットがあると判定した場合、ターゲットの距離及び相対速度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定する。
(もっと読む)
測定装置および方法
【課題】近距離対象物の距離測定の精度を維持しつつ高速応答を図る。
【解決手段】演算実施判定部52は、A/D変換部23から提供される2周波のドップラ信号の信号強度や、演算結果選択部54から通知される過去の算出距離等に基づいて、対象物が所定範囲内に存在するか否かを判定する。対象物が所定範囲外の場合、FFT方式演算部51による算出距離が、演算結果選択部54を介して演算結果出力部55から出力される。対象物が所定範囲内の場合、タイムインターバル方式演算部53による算出距離と、FFT方式演算部51による算出距離とのうちの、演算結果選択部54により選択された方が、演算結果出力部55から出力される。本発明は、プリクラッシュシステム等の高応答システムに適用可能である。
(もっと読む)
測定装置および方法
【課題】高速対象物の距離測定の高速応答を図る。
【解決手段】FFT方式演算部51は、A/D変換部23から提供される2周波のドップラ信号に基づいて、対象物の距離を算出する。ハイパスフィルタ部52は、A/D変換部23から提供される2周波のドップラ信号に対してハイパスフィルタ処理を施す。タイムインターバル方式演算部53は、このハイパスフィルタ処理の結果得られる信号に基づいて、対象物の距離を算出する。演算結果統合部54は、タイムインターバル方式演算部53による算出距離と、FFT方式演算部51による算出距離とを統合した距離を、演算結果出力部55を介して外部に出力する。本発明は、プリクラッシュシステム等の高応答システムに適用可能である。
(もっと読む)
車載制御システム
【課題】レーダ装置の性能低下が検知された場合に、測定および車両制御を一時停止し、車両の安全を確保した後に、故障診断処理を実行して性能低下の原因を特定可能な車載制御システムを得る。
【解決手段】レーダ装置10は、電磁波の送受信手段と、送信信号および受信信号から車両と目標物体50との間の距離および相対速度を測定する信号処理部7と、信号処理部7の処理結果からレーダ装置10の性能低下を検知する性能低下検知部8と、目標物体50の測定を停止して、レーダ装置10の故障診断を行う故障検知部9とを備え、性能低下検知部8により性能低下を検知した場合には、レーダ装置10による目標物体50の測定と車両制御装置20による車両制御を停止して、故障検知部9による故障診断を行う。
(もっと読む)
車載用レーダ装置
【課題】先行車との車間距離を目標車間距離に維持すべく自車の制駆動力を制御する機能を備えるACCシステムにおいて、先行車の確定に用いられるヨーレートに乗る高周波成分(ノイズ)を除去するフィルタの応答遅れを小さく抑えられることにより、S字カーブ等においても、先行車を適確に捕捉しえるようにする。
【解決手段】フィルタ処理後のヨーレートと車速の検出信号とから自車進行路として自車の進行方向に沿う曲率を推定する手段23、自車進行路の車線幅を設定する手段24、自車進行路の曲率と車線幅とから自車進行路の車線形状を設定する手段25、前方車の位置を検出する手段21、自車進行路の車線形状上の最も近い前方車を所定の車間距離を保つべき対象の先行車と確定する手段26、フィルタ処理後のヨーレートから車両の操舵に伴う変動を判定するとその間はフィルタの時定数を小さく補正する手段32〜34、を備える。
(もっと読む)
レーダシステム及びレーダカバーの傾き調節方法
【課題】、レーダ波の減衰を最小にするレーダカバーの傾き調節方法を有するレーダシステムを提供する。
【解決手段】 本発明は、車両に装着されたレーダシステムにおいて、レーダと、前記レーダの前面に装着されたレーダカバーと、前記レーダカバーに連結され、前記レーダカバーの傾きを調節するレーダカバーの傾き調節手段と、前記レーダカバーの傾き調節手段と連結された制御機とを含み、前記制御機は、気象情報測定装置または端末装置を介して受信した気象情報によって、前記レーダカバーによるレーダ波の反射が最小になる前記レーダカバーの傾きを決定し、前記傾き調節手段を用いて前記レーダカバーの傾きが前記傾きになるように調節することを特徴とする。
(もっと読む)
レーダ装置及び信号処理方法
【課題】レーダの検出視野内に複数の標的が存在する場合でも、標的までの距離と速度を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】周波数差を持つ二つの周波数を送信するレーダにおいて、周波数傾きを持つ区間と、周波数傾きを持たない区間を交互に繰り返しながら電波を送信する。上記二つの区間において、それぞれ標的までの距離と相対速度の計測がなされ、隣り合う区間で計測結果を比較し、それらに矛盾がない場合のみ計測結果が正しいと判断する。
(もっと読む)
レーダ装置及び物標位置検出方法
【課題】ビーム角度ごとの反射ビームの強度が複数の極大値を有するような分布形状を形成したときに,1つの物標からの反射ビームによるものであるかを判別して,精度よく物標位置を検出する。
【解決手段】スキャン式レーダ装置により,所定のビーム角度ごとに順次ビームを射出してスキャンを行い,ビーム角度ごとの反射ビームの強度の分布形状を求め,スキャンごとに分布形状が極大値を示す角度方向を1つの物標位置として検出する。そして第1のスキャンにおいて1つの極大値を有する第1の分布形状が形成された後,第2のスキャンにおいて複数の極大値を有する第2の分布形状が形成され,且つ第1の分布形状を形成する反射ビーム本数の合計と第2の分布形状を形成する反射ビーム本数の合計との差が基準値以下である場合は,当該第2のスキャンでは第2の分布形状に基づき1つの物標位置を検出する。
(もっと読む)
目標物監視装置、及び目標物監視方法
【課題】複雑なアルゴリズム処理を要することなく、監視対象となる目標物の検出方向を
精度良く決定することができ、安価な構成部品により、目標物の誤検出を防止することが
できる目標物監視装置を提供すること。
【解決手段】監視対象となる目標物を検出する目標物検出部23aと、走行している道路
のカーブR情報を取得するカーブ情報取得部23bと、所定期間内におけるカーブR情報
の変動状態を判定するカーブ変動状態判定部23cとを備え、カーブ変動状態判定部23
cによりカーブR情報の変動状態が所定の変動条件を満たしたと判定された場合、目標物
検出部23aが、所定の閾値条件を満たすカーブR情報を利用して目標物を検出する。
(もっと読む)
101 - 120 / 225
[ Back to top ]