
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
41 - 60 / 225
レーダ装置
【課題】物標に関する情報の算出を精度良く行う。
【解決手段】レーダ装置は、送受信手段と、物標検出手段とを備える。送受信手段は、レーダ波を送信するとともに、物標により反射されたレーダ波を逐次受信する。物標検出手段は、送受信手段が受信した受信信号のスペクトルにおけるピークに基づいて物標を検出し、当該ピークから物標を検出できない場合に物標を外挿状態と判断する。また、物標検出手段は、スペクトルにおけるピークの状態に基づいて外挿状態の種類を決定する。
(もっと読む)
信号処理装置、及びレーダ装置

【課題】複数の目標物体から得られたレベルの異なるビート信号の周波数が近接する場合であっても、それぞれの目標物体を検出する。
【解決手段】周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置のピーク信号検出手段は、前記周波数スペクトルのレベルの周波数方向における変化率に基づき、前記極大値を形成する第1のピーク信号から所定周波数範囲内で極大値を形成しない第2のピーク信号をさらに検出するので、第1のピーク信号とそのサイドローブに埋もれて極大値を形成しない第2のピーク信号のそれぞれに対応する目標物体を検出することができる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】車両の前側方監視用レーダ装置において目標物体の位置を精度よく検出する。
【解決手段】 車両に搭載されるとともに前記車両の側方の領域を含む走査領域を走査するレーダ送受信機の信号処理装置は、前記車両の前側方をY軸、前記Y軸と交差する方向をX軸としたときに前記走査領域における目標物体の位置のX、Y座標を検出する位置検出手段と、過去の検出サイクルで検出された前記目標物体の位置の前記検出サイクルあたりのX座標差分値とY座標差分値とに基づき、当該目標物体の位置のX、Y座標を予測する位置予測手段と、前記検出された位置のX、Y座標が前記予測された予測位置のX、Y座標それぞれの許容範囲に含まれるときに、当該検出された位置を確定する位置確定手段とを有するので、X座標の差分値が大きい目標物体の位置を精度良く予測でき、位置検出制度を向上できる。
(もっと読む)
物体検出装置
【課題】 レーダを用いた物体検出において、物体を精確に検出する物体検出装置10を提供する。
【解決手段】 本発明に係る物体検出装置10の物体検出部4は、レーダ検出部により得られた複数の検出点データから、一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段22と、上下方向に異なる高さに設定された複数のレイヤの夫々について、グルーピング手段によりグルーピングされた検出点データのうち、当該レイヤ内にある検出点データの個数を算出するレイヤ包含点数算出手段24と、レイヤ包含点数算出手段により算出された検出点データの個数が最大となるレイヤを判定し、当該レイヤに属する検出点データを抽出する検出点抽出手段26と、を有する。
(もっと読む)
物体検出装置
【課題】 レーダを用いた物体検出において物体を正確に検出する物体検出装置を提供する。
【解決手段】 本発明に係る物体検出装置1の物体検出部4は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段41と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段42と、レーダ検出部から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段43と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段44とを有する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】他のレーダ測定装置が近傍に存在するような環境においても、混信による影響を低減できるようにする。
【解決手段】送信部11は、周波数切替部32を制御して1周期ずつランダムな周波数のCW信号を発生させることで、ランダムな間隔で切替信号を発生させ、2種類の周波数の電波を、切替信号に基づいて、交互に切替えて送信する。受信部12は、送信された送信信号としての2種類の周波数の電波のうち、反射されてくる2種類の周波数の電波を、切替信号に基づいて、切替ながら受信し、受信した2種類の周波数の電波より受信信号を生成する。衝突予備動作用信号処理部13は、受信信号を、所定時間の間でサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
信号処理装置、レーダ装置、及び、車両制御システム。
【課題】 機械走査方式のレーダ装置において1チャネルの角度信号からでもアンテナの回動方向を検出する。
【解決手段】 アンテナ角度検出手段は、仮決めした回動方向におけるアンテナ角度を検出し、静止物の方位角度の変位方向が前記車両の旋回方向と反対方向であるときには前記仮決めされた回動方向を正しいと判定し、前記変位方向が前記車両の旋回方向と同じ方向であるときには前記仮決めされた回動方向を誤りと判定することでアンテナの回動方向を確定するので、1チャネルの角度信号からでもアンテナの回動方向を検出できる。
(もっと読む)
物体検出装置
【課題】死角を減少させて、自車両の周辺のターゲットを、簡易な構成で検出することができる物体検出装置を提供する。
【解決手段】物体検出装置は、当該車両の外部に向けた第1の検出範囲内の物体を検出する第1レーダと、上記車両における上記第1レーダと異なる位置に搭載され、当該車両の外部に向けた第2の検出範囲内の物体を検出する第2レーダと、上記第1レーダの検出結果および上記第2レーダの検出結果に基づいて、検出された物体が上記車両に衝突する危険性を判断する判断手段とを備える。また、上記第1レーダおよび上記第2レーダは、当該第1の検出範囲の中心軸と当該第2の検出範囲の中心軸とが上記車両の外部でねじれるまたは交わる位置関係で上記車両に搭載される。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
信号処理装置、レーダ装置、及び、信号処理方法
【課題】受信領域端部に実在する物体からの受信信号から検出される方位角のうち、受信領域中心部で誤検出された方位角を誤りと判定するとともに、受信領域端部において検出される方位角を正しいと判定する。
【課題を解決するための手段】
基準方向にレーダ信号を送信し、所定間隔離間したアンテナ対で受信したレーダ信号対の位相差から物体の方位角を検出する信号処理装置において、前記受信信号対の強度が、当該受信信号対から検出された前記方位角と前記距離との組合せに対応する基準値以上のときに、当該方位角が正しいと判定し、前記強度が前記基準値未満のときに当該方位角が誤りと判定する。このとき基準値は、前記距離に応じて異なるとともに、前記方位角に応じて異なるので、受信領域中心部内で誤検出された方位角を誤りと判定するとともに、受信領域端部において検出される方位角を正しいと判定することができる。
(もっと読む)
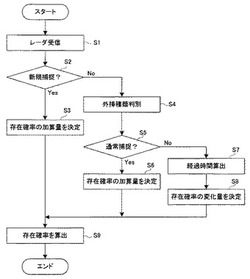
衝突予測装置
【課題】 物体との衝突部位の予測精度を向上させることができる衝突予測装置を提供する。
【解決手段】 衝突予測装置は、自車両周辺の障害物を検出すると共に、自車両が走行する道路のカーブ半径を推定し、その推定カーブ半径の微分値を算出する。そして、衝突予測装置は、推定カーブ半径の微分値をR補正係数で補正して推定カーブ半径微分係数を算出し、その推定カーブ半径微分係数を用いて、自車両の部位区間毎に蓄積された衝突確率の積算値を補正する。そして、衝突予測装置は、自車両における障害物との衝突部位を予測し、上記の推定カーブ半径微分係数を用いて、衝突確率の積算上げ幅を設定する。そして、衝突予測装置は、該当する衝突部位における衝突確率の積算値に対して今回の衝突確率を積算上げ幅の分だけ加算し、衝突部位毎の衝突確率の積算値に基づいて、自車両のある部位区間に障害物が衝突するかどうかを判定する。
(もっと読む)
移相器とそれを用いた電子機器
【課題】
本発明は、移相器とそれを用いた電子機器に関するものであり、導波路からの電波漏れを抑制することを目的とする物である。
【解決手段】
そしてこの目的を達成するために本発明は、可動導波路10と固定導波路12を所定間隔離して、可動状態で対向させると共に、これらの可動導波路10と固定導波路12には、溝状の導波路13、29を形成し、この導波路29に連通する第一の入出力ポートとしての開口30を形成するとともに、前記導波路13に連通する第二の入出力ポートとしての開口14を形成し、開口30近傍に、第一の短絡面30Aを形成するとともに、開口14近傍に第二の短絡面として板状突起14Aを形成し、これらの第一の短絡面30Aと板状突起14Aの高さは、略λ/4(λは使用電波の波長)とし、導波路13の開口外周には、高さが略λ/4の突起44を設け、可動導波路10と固定導波路12間の所定間隔は、λ/4未満とした。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
パルスドップラレーダ装置
【課題】使用形態の変更を自動的に判定して使用条件を切り替えるパルスドップラレーダ装置を提供する。
【解決手段】判定・制御部110は、使用形態判定手段111と、パルス幅選択手段112と、帯域制限幅選択手段113とを有しており、使用形態判定手段111が自車両の所定の制御装置からギア状態の信号を入力して使用形態の判定を行っている。使用形態判定手段111の判定結果に基づいて、パルス幅選択手段112および帯域制限幅選択手段113がそれぞれ広帯域インパルス生成部120および帯域幅制限部150を制御している。
(もっと読む)
物体検知装置
【課題】 FM・CW型の物体検知装置で、演算処理量や処理時間を最小限に抑えながら物体の距離や相対速を精度良く算出できるようにする。
【解決手段】 FM・CW型のレーダー装置Rにおいて、物体候補情報記憶手段M5が、各検知エリアにおける上昇側および下降側のピーク信号の組み合わせに基づいて求められる物体との距離または相対速を物体候補情報として記憶すると、グルーピング手段M7が、任意の検知エリアにおいて求められるピーク信号1とその他の検知エリアにおいて求められるピーク信号2との周波数差が所定値以下であり、かつ前記物体候補情報記憶手段M5に記憶されているピーク信号1による物体候補情報とピーク信号2による物体候補情報とが略等しい場合に、両ピーク信号をグルーピングし、更に物体情報算出手段M8がグルーピング処理後の上昇側および下降側のピーク信号の組み合わせに基づいて物体との距離または相対速を算出する。
(もっと読む)
レーダシステム、電源装置の制御方法
【課題】アナログ信号をデジタル信号に変換し、FFTの結果を用いて物体を検出するレーダ装置と、レーダ装置に電力を供給する電源装置とを有したレーダシステムにおいて、スイッチングノイズに起因した周波数成分の誤認識を防止すること。
【解決手段】電源装置60に備えられた信号選択回路61は、レーダシステム30が起動してから安定状態必要期間が経過した後は、スイッチングクロック発生部57からのスイッチングクロックをスイッチングトランジスタ62に出力する。スイッチングクロックが入力される電源装置60は、スイッチング周波数(ナイキスト周波数)でスイッチングされ、ミリ波レーダ装置31に供給される出力電力には、スイッチング周波数で変化するスイッチングノイズが含まれる。スイッチングノイズが重畳したビート信号をFFTすると、検出する周波数帯の両端にて、スイッチングノイズの周波数成分が検出される。
(もっと読む)
物体検出装置
【課題】検出性能の低下を的確に判定する。
【解決手段】物体検出ECU11は、ミリ波レーダ21を介して、車両の前方に設定された第1領域R1内の物体を検出する第1検出部111と、CCDカメラ22,23を介して、車両の前方の、第1領域R1の少なくとも一部の領域を含む第2領域R2内の物体を検出する第2検出部112と、第1領域R1及び第2領域R2に含まれる領域である第3領域R3内に含まれる少なくとも1の物体が第2検出部112によって検出されているか否かを判定する検出判定部113と、検出されていると判定された場合に、第2検出部112によって検出されている第3領域内の物体の内、少なくとも1の物体が第1検出部111によって検出されていない場合に、ミリ波レーダ21又は第1検出部111の検出性能が低下していると判定する性能判定部115と、を備える。
(もっと読む)
物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法
【課題】様々な物体を高精度に認識することのできる物体検知装置、物体検知方法、またかかる物体検知を用いた周辺監視装置および運転支援システムを提供すること。
【解決手段】物体検知波部10は、カメラ32が撮影した画像に対する画像認識によって物体候補領域を識別し、当該領域に存在する可能性のある物体の種別、方向、距離、角度に基づいてレーダ検知の閾値を設定した閾値マップを作成する。検知処理部16は、レーダ31の反射波強度と閾値マップに示された閾値とを比較して、物体の存在を検知する。
(もっと読む)
レーダ装置、及び方位角検出方法
【課題】異なる周期で動作する画像認識装置からの検出位置を用いて、レーダ装置により物標の方位角を精度良く検出する。
【解決手段】レーダ装置に、前記探索領域の撮影画像に基づいて第1の周期ごとに前記物標の位置を検出する画像認識装置から、当該検出された検出位置が入力される入力手段と、複数の前記入力された検出位置に基づいて、前記第1の周期より短い第2の周期ごとに前記物標の方位角を推定する方位角推定手段と、前記探索領域のうち、前記推定された推定方位角付近では第1の方位角刻み、それ以外の範囲では前記第1の方位角刻みより大きい第2の方位角刻みで前記物標の方位角を検出する方位角検出手段とを備えることで、物標の方位角を精度良く検出できる。
(もっと読む)
レーダ装置
【課題】
カメラを用いずに、自車の前方に存在する二台の車両の中間地点に車両が存在している、という誤検知を回避することを目的とする。
【解決手段】
レーダシステムは、自車左前方に設置された第1のレーダ装置と、自車右前方に設置された第2のレーダ装置と、を備え、前記第1及び第2のレーダ装置は、それぞれ、前方に存在する複数の物体を分離して検出するための分解能の間隔をおいて設置される。第1及び第2のレーダ装置の電波照射範囲は、それぞれ、自車の走行路上で重複し、かつ、左右の隣接車線路上で重複しないように調整されてもよい。又、第1のレーダ装置の電波照射範囲から得られる検出結果、及び、第2のレーダ装置の電波照射範囲から得られる検出結果との差異に基づいて、自車の前方に存在する複数の物体を分離して検出してもよい。
(もっと読む)
41 - 60 / 225
[ Back to top ]