
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
21 - 40 / 225
信号処理装置、及びレーダ装置
【課題】
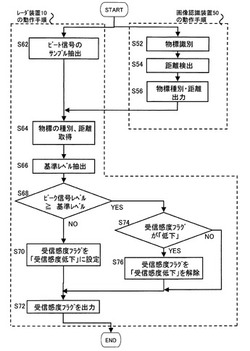
車載レーダ装置の受信感度の低下を正確かつ迅速に検出する。
【解決手段】
車両に搭載されるとともに前記車両周囲に送信信号を送信して物標に反射された前記送信信号を受信するレーダ送受信機の信号処理装置において、前記車両に搭載された画像認識手段が前記物標の撮像画像に基づき前記物標の種別と距離とを検出し、受信感度監視手段が受信信号のレベルまたは前記受信信号から生成される信号のレベルが前記物標の距離と種別とに対応づけられた基準レベル以上であるか否かを検出するので、受信信号や受信信号から生成される信号のレベルに適切な基準レベルを適用できる。よって、受信感度の低下を正確かつ迅速に検出できる。
(もっと読む)
信号処理装置、及びレーダ装置

【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
物体検知方法
【課題】 レーダー装置により至近距離の物体を確実に検知できる物体検知方法を提供する。
【解決手段】 検知されたターゲットと同方向で距離が2倍の位置にダミーターゲットを設定し、ダミーターゲットの位置を含む所定範囲に倍波ターゲット検知範囲を設定し、倍波ターゲット検知範囲に検知されたターゲットを倍波ターゲットとして判定し、倍波ターゲットと同方向で距離が2分の1の位置に補間ターゲットを設定し、補間ターゲットの位置を含む所定範囲に基本波ターゲット検知領域を設定し、基本波ターゲット検知領域に基本波ターゲットが検知されない場合に補間ターゲットを基本波ターゲットとして出力する。このように、検知すべき基本波ターゲットが至近距離において非検知状態になっても、依然として検知されている倍波ターゲットから算出した補間ターゲットにより基本波ターゲットのデータを推定して出力することで、基本波ターゲットを継続的に検知し続けることができる。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
車載電波パルスレーダ装置
【課題】レーダ検出性能を損なうことなく異常発生状態の検出回路をできるだけ簡便にして安価でかつ小形な構成を実現し、RF送受信回路の感度低下や、A/D変換器および信号処理回路を含めた異常発生状態を高い信頼性で検出することのできる車載電波パルスレーダ装置を得る。
【解決手段】信号処理回路14で制御されるアンプゲイン制御回路17により、RF送受信回路15に含まれる送受信アンプのゲインを所定範囲内で個別かつ任意に強制的に変化させて、RF送受信回路15内または送受信アンテナ間に存在する漏れ波の振幅を変化させる。これにより得られたIF信号を観測し、検出値と初期調整時に記憶した正常時と比較して、回路上の異常発生状態を検出する。
(もっと読む)
FMCWレーダセンサ、及び、周波数マッチングのための方法
本発明は、FMCWレーダセンサにおける周波数マッチングのための方法であって、レーダセンサにより測定された物体をそれぞれに表し、様々な変調ランプ上で獲得される複数の周波数が、物体の間隔dと速度vとの可能な組み合わせを表す軌跡(g1〜g4)としてd−v空間(26)内に示され、様々な変調ランプ上で測定される物体を識別するために、様々な変調ランプ上で獲得される周波数に対応する軌跡間の一致(T、S)が探索される、上記方法において、最初のステップでは、一致(T)の探索がd−v空間(26)の部分空間(40)に限定され、後続のステップでは、探索がd−v空間の他の範囲へ拡大されるとともに、最初のステップで見出された物体に対応する周波数が隠されることを特徴とする方法に関する。 (もっと読む)
レーダ装置
【課題】車載用などのレーダ装置を、低コストで高精度なものとする。
【解決手段】パルス内周波数拡散された送信パルスを、パルス間で周波数をステップさせて送信させ、その送信パルスの目標物からの反射を受信するレーダ装置において、送信周波数をステップさせるステップ間隔を、周波数の上限と下限を固定した3次関数となるような非線形ステップとした。また、2つの相補となる関数の加算による合成により、目標物からの反射波によるパルス信号以外の成分を抑圧可能な2つの相補信号を、同一周波数で連続する送信パルスとして割り当てるようにした。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
車両の制御装置
【課題】車両の走行中において、先行車の検知と消費電力低減とを両立すること。
【解決手段】車両の前方の先行車を検知する先行車検知手段と、前記先行車検知手段の駆動及び駆動停止を制御する制御手段と、を備えた車両の制御装置において、前記制御手段は、前記車両が規定速度以上で走行中に、前記先行車検知手段が先行車を検知しない場合は前記先行車検知手段の駆動を停止し、その後、予め定めた復帰条件が成立した場合は前記先行車検知手段を再駆動することを特徴とする。
(もっと読む)
物体検知装置
【課題】 受信レベルが異なる二つのターゲットが並走しているとき、受信レベルが低い方のターゲットがゴーストターゲットであると誤判定されるのを防止する。
【解決手段】 ゴーストターゲット候補判定手段M5は、二つのターゲットの自車からの距離が同等であって受信レベル差が所定値以上の場合に、一方のターゲットが他方のターゲットのゴーストターゲット候補であると判定し、並走ターゲット判定手段M6は、二つのターゲットの自車からの距離変化に応じた角度差および左右位置差の変化に基づき、一方のターゲットが他方のターゲットの並走ターゲットであると判定し、ゴーストターゲット判定手段M7は、ゴーストターゲット候補のうちから並走ターゲットデータを削除したものをゴーストターゲットであると判定するので、ゴーストターゲットを精度良く判定しながら、並走ターゲットをゴーストターゲットと誤認するのを未然に防止することができる。
(もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
物体認識装置
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
車両制御システム
【課題】路面上にある小型の制御対象外目標物体からレベルの大きい受信信号が得られた場合であっても、車両制御システムの誤動作を回避する。
【解決手段】 車両の略水平方向の探索空間にレーダ信号を送信して目標物体による反射信号を受信し、受信信号に基づき前記目標物体の距離を検出するレーダ装置を搭載した車両の制御システムであって、前記探索空間の一部を含む撮影画像から目標物体画像を検出する目標物体画像検出手段と、前記受信信号のレベルが基準レベルを上回り、かつ前記目標物体画像が前記探索空間の下部領域以外の前記撮影画像から検出されたときに、前記検出された距離に基づいて前記車両のアクチュエータの動作を制御する制御信号を出力する制御手段とを有するので、制御対象外目標物体からレベルの大きい受信信号が得られた場合であっても、車両制御システムは誤動作を回避できる
(もっと読む)
物体検出装置および物体検出方法
【課題】レーダ装置が検出した物体を精度良くグループ化することのできる物体検出装置および物体検出方法を提供する。
【解決手段】物体検出装置は、車両周辺の物体を検出することによって得られた捕捉点を示す信号を用いて、当該捕捉点それぞれの移動方向を算出する移動方向算出手段と、予め検出対象となる物体の形状に応じた枠および当該物体で想定されている進行方向として当該枠に進行基準方向を設定し、上記捕捉点のうち、上記移動方向に当該進行基準方向を合わせた当該枠内に存在する捕捉点を同じ物体の捕捉点として判定する判定手段とを備える。
(もっと読む)
対象物検出装置及び対象物検出システム
【課題】ミリ波レーダで対象物を検出するに際し、ミリ波の反射波が微弱である人物を、車両又は道路上の他の物体と区別して有効に検出することができる対象物検出装置、及び対象物検出システムを提供する。
【解決手段】ミリ波レーダから、対象物候補の方向(A,B,C)、距離及び反射波強度を取得し、遠赤外線カメラから、画像データを取得して人物候補領域の方向(D,E)を特定し、人物候補領域にて特定した人物候補への方向(E)に反射波強度が所定値よりも低い対象物候補が有るか否かを判断し、対象物候補が有る(Bの方向の対象物候補)と判断した場合、当該対象物候補を人物候補として検出する。
(もっと読む)
道路形状推定装置
【課題】道路形状の推定精度の向上が図れる道路形状推定装置を提供すること。
【解決手段】車両Mに設けられるレーダ1により車両Mの進行方向側に存在する物体を検出し、検出された物体の検出点に基づいて道路形状を推定する道路形状推定装置であって、レーダ1が所定の周期で繰り返して物体の検出点の検出を行い、今回検出した物体の検出点のほか前回以前に検出した物体の検出点を用いて検出点の点列の形状に基づいて道路形状を推定する。これにより、過去の物体情報により現時点での物体情報の不足を補うことができる。このため、道路形状の推定精度の向上が図れる。
(もっと読む)
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
(もっと読む)
ミリ波誘電体内伝送装置とその製造方法及びミリ波誘電体内伝送方法
【課題】信号処理基板の振動を低減させ、コネクタやケーブルを使わないで信号処理基板間のミリ波の信号を高速に伝送させるようにする。
【解決手段】ミリ波の信号を処理する第1の信号処理基板101と、第1の信号処理基板101に対して信号結合され、ミリ波の信号を受信して信号処理する第2の信号処理基板201と、第1の信号処理基板101と第2の信号処理基板201との間に設けられた所定の比誘電率及び所定の誘電正接を有する粘弾性部材107とを備え、粘弾性部材107が誘電体伝送路を構成する。この構成により、粘弾性部材107が当該信号処理基板101,201に外力が加わったときの振動を吸収するので、第1の信号処理基板101と第2の信号処理基板201の振動を低減させることができ、コネクタやケーブルを使わないで当該信号処理基板間のミリ波の信号を、粘弾性部材107を介して高速に伝送させることができる。
(もっと読む)
レーダ装置
【課題】物標情報を高精度に求めることが可能なレーダ装置を提供すること。
【解決手段】本発明が適用されたレーダ装置は、FMCW方式のレーダ装置であり、変調周期毎に、受信結果を表すビート信号からスナップショットデータを生成する。また、各変調周期のスナップショットデータから生成した変調周期毎の自己相関行列を、複数周期分平均化し、その平均化後の自己相関行列に基づき、MUSIC法により物標方位を求める。但し、平均化は、各変調周期のスナップショットデータに含まれる雑音成分の量(干渉量)に基づき、加重平均により行う。即ち、各変調周期の自己相関行列に作用させる重み付け係数を、その変調周期の干渉量に応じた値に設定する(S570)。干渉量が小さい場合には重み付け係数を大きく、干渉量が大きい場合には、干渉量を小さくといった具合である。
(もっと読む)
レーダ装置
【課題】物標に関する情報の算出を精度良く行う。
【解決手段】レーダ装置は、送受信手段と、物標検出手段とを備える。送受信手段は、レーダ波を送信するとともに、物標により反射されたレーダ波を逐次受信する。物標検出手段は、送受信手段が受信した受信信号のスペクトルにおけるピークに基づいて物標を検出し、当該ピークから物標を検出できない場合に物標を外挿状態と判断する。また、物標検出手段は、スペクトルにおけるピークの状態に基づいて外挿状態の種類を決定する。
(もっと読む)
21 - 40 / 225
[ Back to top ]