
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
81 - 100 / 225
物体検出装置及び物体検出方法
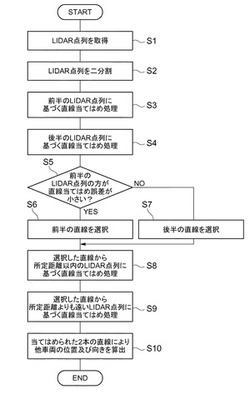
【課題】レーダにより検出された点列に直線を当てはめる直線当てはめ処理時間を短縮する。
【解決手段】前方を走行する他車両を検出してLIDAR点列を取得するLIDAR2と、このLIDAR点列に直線を当てはめて、他車両の中心位置及び向きを求めるECU3と、ブレーキを制御して自車両に制動力を与える制動部4と、を備えている。このECU3は、LIDAR点列を中間位置で分割し、この分割された各LIDAR点列に当てはめられる直線の内、当てはめ誤差の小さい直線を選択する。そして、ECU3は、この選択した直線から所定距離以内のLIDAR点列に直線を当てはめると共に、この選択した直線から所定距離よりも遠いLIDAR点列に直線を当てはめることで、他車両の隣接する2面に対応する直線を求める。
(もっと読む)
物体検出装置

【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
車両用走行制御装置
【課題】車速変動許容範囲を最適な範囲に変更することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置は、車速を検出する車速センサ11と、目標車速を設定する復帰/加速スイッチ13およびセット/減速スイッチ14と、目標車速設定手段により設定された目標車速を含む車速変動許容範囲を設定する車速変動許容範囲設定手段と、車速変動許容範囲内において指示車速を算出する指示車速算出手段と、指示車速に基づいて車両の走行制御を行うスロットル開度制御部36と、乗員の操作により車速変動許容範囲を変更する上限車速変更スイッチ19および下限車速変更スイッチ20を備える。
(もっと読む)
物体検出装置
【課題】検出信号のピーク値を的確に検出して適切な物体検出が行える物体検出装置を提供すること。
【解決手段】電波を送信し物体で反射した受信波を送信波とミキシングして検出信号を出力し、その検出信号において物体に対応したピーク値を検出する際に、ピーク値の検出予測位置に所定範囲の探索領域を設定し(S10)、その探索領域においてピーク値を検出し(S12)、その探索領域にピーク値を検出できない場合に検出信号の信号値の増加する側に探索領域をシフトさせてピーク値の検出を行う(S12〜S16)。これにより、探索領域を大きくすることなく広い範囲でピーク検出が可能となり、確実なピーク検出が行え、物体の検出精度の向上が図れる。
(もっと読む)
物体検出装置
【課題】反射強度の入力が不安定な場合には、物体の位置情報を推定することができる。
【解決手段】電磁波センサ30及び画像センサ31と、反射強度が所定値より低いか否かを判定する強度判定部21と、車両進行方向における物体Hの速度成分が所定値より低いか否かを判定する速度判定部22と、強度判定部21によって反射強度が所定値より低いと判定され、速度判定部22によって速度成分が所定値より低いと判定された場合には、車両4の移動量Zに基づいて、物体Hと車両4との相対距離Z2を算出する相対距離算出部23と、画像情報から物体Hの方位情報Y2を取得し、方位情報Y2及び相対距離Z2に基づいて物体Hの位置を推定する位置推定部24とを備えることで、画像センサ31で入力した画像情報を用いて、物体Hの位置情報を推定することができる。
(もっと読む)
車両における交通環境を検出するためのレーダセンサ
【課題】交通状況に応じて車両用レーダセンサの送信および/または受信動作におけるセンサ感度を調整可能にする。
【解決手段】調整可能な送信および/または受信増幅器22、30と、送信および/または受信ゲインを調整するための調整装置34とを備えるレーダセンサにおいて、アナログ/デジタル変換器24を通過したデジタル受信信号を解析回路26において解析し、車両環境デジタル測定データを連続して評価して、目下の評価に従って調整装置34に作用する評価装置32を備えた。
(もっと読む)
物体検出装置
【課題】物体情報を格納する際の優先順位を設定することにより、物体検出処理を適切かつ迅速に行える物体検出装置を提供する。
【解決手段】車両の周囲の物体を検出する物体検出装置1であって、物体の車両に対する相対距離及び相対速度についての物体情報を取得し、取得された複数の物体情報を格納するに際し、車両に対し離反する離反移動物の物体情報に対し離反移動物以外の物体の物体情報を優先的に格納する。これにより、制御システムに必要となる物体情報を優先的に格納することができる。このため、制御システムに必要な物体情報を取りこぼすことを低減でき、物体検出処理を適切かつ迅速に行える。
(もっと読む)
車幅検出方法及び装置、車両制御装置
【課題】アンテナを大型化することなく、レーダからの検出結果に基づいて車幅を検出できるようにし、更には、その車幅を利用した車両制御の信頼性を向上させる。
【解決手段】レーダ波を反射したターゲットの検出結果から、連続的に配置された路側物の位置、先行車両が位置する方向θt及び該先行車両までの距離Rt、路側物によって生じる先行車両の虚像が位置する方向θi及び該虚像までの距離Riを抽出する。更に、路側物の位置から自車両の進行方向に対する路側物の配置角度ψを求めると共に、虚像の方向θiに位置する路側物までの距離Rwを求め、次式に従って、車幅Wを算出する。
W=2{Rw×sinθi+Rt×sinθt−(Ri−Rw)×sin(θi+2ψ)}
(もっと読む)
車種判別装置
【課題】車両に搭載された検知手段を用いて他車両の車種を判別する車種判別装置を提供することを課題とする。
【解決手段】車両の車種を判別する車種判別装置1であって、車両を検出する車両検出手段3aと、車両検出手段3aで検出した車両の車体のフレームを検出するフレーム検出手段3bと、フレーム検出手段3bでの検出結果に基づいてフレームの有無又は/及び形状によって車種を判別する車種判別手段3cとを備えることを特徴とする。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、先行車が存在するのに、一瞬、自車両が車線を逸脱しそうになるような状況で、先行車が存在しないという誤った判断をすることがなく、先行車への追従性が損なわれることはなくなり、これにより、追従性精度の向上に貢献することにある。
【解決手段】車線逸脱防止制御手段から、自車両の推定走行軌跡と走行レーンとの角度情報を出力し、角度情報が設定値以上ある場合で、且つレーダから出力される結果が、前回の結果が先行する車両有りで、今回の結果が先行する車両無しの場合でも、先行車両検出手段で先行車有りと出力している。
(もっと読む)
物体検出装置
【課題】追尾範囲を適切に設定して物体の検出精度の向上が図れる物体検出装置を提供すること。
【解決手段】物体検知を行うレーダ3〜5を備えて構成され、レーダ3〜5により検知された物体の追尾範囲を物体が検知される方向に応じて設定する。これにより、物体の移動状態に応じて追尾範囲の向きを設定することが可能となる。このため、物体の移動状態に適した追尾範囲を設定でき、物体のロストなどを低減でき、適切なトラッキングが行える。従って、物体の検出精度を高めることができる。
(もっと読む)
制御対象認識装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 反射レベルが閾値以上で前回まで制御対象であると認識されていたゲートが、今回制御対象であると認識されなくなったとき、そのゲートを実際に検知されたものと見なして外挿手段が所定回数(5回)を限度に外挿(○参照)するものにおいて、ゲートが静止物であり、かつゲートの前回(タイム4)検知時の反射レベルおよび今回(タイム5)検知時の反射レベルから予測した次回(タイム6)検知時の反射レベルが検知閾値未満(□参照)である場合には、外挿手段が外挿を行う回数の限度を前記5回から2回に減少させるので、自車の接近に伴って反射レベルが急激に低下して制御対象でないと推定されるゲートの外挿回数を減らし、該ゲートに対する不必要な車両制御が行われるのを防止して運転者の違和感を解消することができる。
(もっと読む)
レーダ装置、物体検出方法、及び車両
【課題】車載レーダ装置を用いて車両の制御を行う場合、データ処理を早く行うため物体検出範囲を適切に制御する必要がある。従来はビーム出射強度を調整していたが、ビームの強度は距離に応じて徐々に減衰するため、物体の検出範囲を適切に設定することは困難であった。また、広角近距離用と狭角遠距離用のレーダ装置を使い分ける方法では、2つのレーダ装置を設置しなければならないという問題があった。装置を複雑化せずに検出範囲を適切に設定できる方法を提供する。
【解決手段】物体に向けてビームを出射する手段と、前記物体からの反射波を受信する手段と、車両の走行状況に応じて物体検出範囲を設定する手段と、前記受信信号と前記物体検出範囲の情報とに基づいて物体を検出する手段とを有するレーダ装置により、容易に検出範囲を制限できるので処理負荷が軽減され、データ処理速度を改善できる。
(もっと読む)
前方障害物検出装置
【課題】前方障害物と同等なレベルの反射波を返す路上静止物を前方障害物として誤検出することを防止する。
【解決手段】本発明の前方障害物検出装置(レーダセンサ部50)は、先行車両が前方物体の上方を通過すると該前方物体を路上静止物とする第1の路上静止物認識部13bと、先行車両が前方物体の前方に存在すると該前方物体を路上静止物とする第2の路上静止物認識部13cと、自車両の車速が所定車速以上かつ前方物体が継続的に検知される2つの他の前方物体の間に存在すると該前方物体を路上静止物とする第3の路上静止物認識部13dと、前方物体が至近距離ではじめて検知されると該前方物体を路上静止物とする第4の路上静止物認識部13eと、前方物体の反射波出力が自車両との距離が所定値に至るまで単調増加し、該距離が該所定値以下になると単調減少する特性を有すると該前方物体を路上静止物とする第5の路上静止物認識部13fとを有する。
(もっと読む)
検出装置および方法
【課題】方向検出技術を簡便かつ精度よく実現できるようにする。
【解決手段】速度距離センサ1は、目標物3と自身の間の直線距離を距離R1として検出し、自身の位置における目標物3の相対速度を速度V1として検出する。速度センサ2は、自身の位置における目標物3の相対速度を速度V2として検出する。かかる速度距離センサ1と速度センサ2とを搭載した検出装置は、距離R1、速度V1、および速度V2をパラメータ値として利用して、距離R、距離RR、角度θ3を演算し、角度θ3を目標物の方向として出力し、距離Rまたは距離RRを目標物の距離として出力する。本発明は、レーザレーダによる方向検出技術に適用可能である。
(もっと読む)
周辺監視センサ
【課題】物体の相対位置、相対速度、物体形状などを確実にセンシングする周辺監視センサを得る。
【解決手段】周辺監視センサ1は、ミリ波レーダ2、画像センサ3、信号処理部4を具備し、各センサが検出したデータについてエリア分けを行い、所定のエリア内に存在する物体(ターゲット)については、両センサが取得した情報に基づいて、物体に関する情報を作成する。ミリ波レーダは、遠距離の物体の距離、速度の測定が得意で、画像センサは、物体の幅、角度の測定が得意であるので、それぞれの得意のデータを組み合わせることにより、正確な情報を得ることができる。信号処理部4は、ミリ波レーダが検知した物体の存在場所に画像センサが検知した物体情報を組み合わせて物体面であることを判断する。
(もっと読む)
車両用物体検知装置
【課題】前方車両の相対位置および相対速度を精度よく求めることが可能な車両用物体検知装置を提供する。
【解決手段】代表点算出手段は、前方車両87の反射点の配列に基づいて線分が2つ認識された場合には該線分の交点として算出される端点87aを、前方車両77の反射点の配列に基づいて線分が1つ認識された場合には該線分の重心点77aを代表点として算出し、代表点補正手段は、前方車両86の相対距離が所定距離d以上の場合に、代表点を端点から重心点86aに補正する構成とした。
(もっと読む)
衝突予測装置
【課題】衝突予測精度の向上を図った衝突予測装置を提供すること。
【解決手段】他車両104の複数位置の物標点P1〜P5を各々検出し、各物標点P1〜P5について予測した衝突部位に基づいて自車両102と他車両104との衝突態様を予測する。これにより、複数位置の物標点P1〜P5を各々検出して、各物標点P1〜P5について衝突部位を予測しているので、他車両104の限られた点(従来の代表点)だけでなく、他車両104の複数位置について自車両102のどの部位に衝突するのかを予測することができる。従って、従来のグルーピング処理において、代表点P1,P3に包括されて物標出力されていなかったメンバーP2,P4,P5情報を有効活用することで、衝突予測精度を向上させることができる。
(もっと読む)
物体検出装置、及び車両用制御装置
【課題】必要な量の情報を出力しつつ通信負荷を軽減することが可能な物体検出装置を提供すること。
【解決手段】移動体に搭載される物体検出装置(10A、10B)であって、電磁波を放射すると共に放射した電磁波の反射波を受信する電磁波放射受信手段(12)と、電磁波放射受信手段が検出した反射波のデータに基づいて反射点を特定する反射点特定手段(18)と、反射点特定手段により特定された反射点のうち、絶対速度ベクトルが略同一線上にある反射点が同一グループとなるように、反射点特定手段により特定された反射点をグループ化してグループを生成するグループ生成手段(22)と、グループ生成手段により生成されたグループについて代表点を設定する代表点設定手段(24)と、を備え、代表点設定手段により設定された代表点に関する情報を出力する物体検出装置。
(もっと読む)
物体検知装置
【課題】基準走査方向に存在する物体の検知可能距離を確保し、かつこの基準走査方向から外れた位置に存在する物体の検知能力を確保することができる物体検知装置を提供する。
【解決手段】レーダ装置1は、水平方向に分割した検知領域毎に、その検知領域における存在を検知したい物体の距離範囲に応じて垂直方向の走査範囲を変化させる。例えば、水平方向における基準走査方向を正面前方に決定している場合、この基準走査方向から離れるにつれて、レーザ光の垂直走査範囲を大きくする。これにより、レーダ装置1は、水平方向における走査角度毎に、その走査角度において、存在を検知したい物体の距離範囲で、垂直方向におけるレーザ光の照射範囲をほぼ同じにする。
(もっと読む)
81 - 100 / 225
[ Back to top ]