
Fターム[5J070BF16]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 自動制御(自動車等) (225)
Fターム[5J070BF16]に分類される特許
61 - 80 / 225
レーダ装置
【課題】
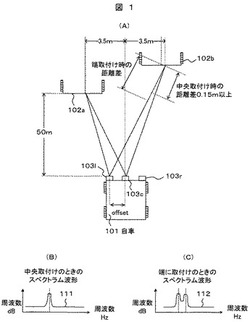
カメラを用いずに、自車の前方に存在する二台の車両の中間地点に車両が存在している、という誤検知を回避することを目的とする。
【解決手段】
レーダシステムは、自車左前方に設置された第1のレーダ装置と、自車右前方に設置された第2のレーダ装置と、を備え、前記第1及び第2のレーダ装置は、それぞれ、前方に存在する複数の物体を分離して検出するための分解能の間隔をおいて設置される。第1及び第2のレーダ装置の電波照射範囲は、それぞれ、自車の走行路上で重複し、かつ、左右の隣接車線路上で重複しないように調整されてもよい。又、第1のレーダ装置の電波照射範囲から得られる検出結果、及び、第2のレーダ装置の電波照射範囲から得られる検出結果との差異に基づいて、自車の前方に存在する複数の物体を分離して検出してもよい。
(もっと読む)
レーダ装置、及び、車両制御システム

【課題】方位ばらつきが大きい場合であっても、コストの増大を招くことなく、物標の方位を精度良く算出できるレーダ装置を提供する。
【解決手段】互いに間隔が異なる三本以上の素子アンテナ15のうち、任意の二本の素子アンテナ対で受信された反射波の位相差から物標の方位候補を複数求める処理を各素子アンテナ対に対して行なう方位候補演算部と、前記方位候補演算部で算出された単一または複数の方位候補に対応するデジタル・ビーム・フォーミング演算を行なうDBF演算部と、前記DBF演算部で算出されたDBF値に基づいて前記物標の方位を確定して出力する方位演算部として機能するCPU11を備えているレーダ装置10。
(もっと読む)
レーダ装置
【課題】物標が存在する可能性が高い場合に、物標が存在すると判定するタイミングを早めることができるレーダ装置の提供。
【解決手段】レーダ波を送信する送信部と、物標で反射されたレーダ波の反射波を受信して受信信号を発生する受信部と、受信信号と送信信号からビート信号を生成するビート信号生成部と、ビート信号のピーク周波数を抽出しビート信号のピーク周波数におけるピーク強度を求める周波数解析部と、ピーク周波数およびピーク強度に基づき、物標の存在確率を測定サイクル毎に求める存在確率算出部と、算出された存在確率が所定値に達したとき、物標が存在すると判定する存在判定部とを備え、存在確率算出部は、ビート信号のピーク強度が第1の閾値以上第2の閾値未満(第1の閾値<第2の閾値)であるとき存在確率を第1の値で増加させ、ビート信号のピーク強度が第2の閾値以上であるとき存在確率を第2の値(第1の値<第2の値)で増加させる。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
車両用走行安全装置
【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
レーダ装置及び物標検出方法
【課題】FM−CWモードで得られた一方のピーク信号が目標とする物標以外の他の物標のピーク信号に埋もれた場合に、ペアリング処理が行えないという問題があった。
【解決手段】本発明のレーダ装置は、FM−CWモードとCWモードとを交互に切り替えて物標を検出するレーダ装置において、FM−CWモードによりアップビートからピーク信号を検出するとともに、ダウンビートからピーク信号を検出する手段と、アップビートから検出したピーク信号と、ダウンビートから検出したピーク信号とをペアリングする手段と、ペアリング手段によってアップビートとダウンビートのうち一方のビートから検出されたピーク信号にペアリングできなかったピーク信号がある場合、CWモードで検出した相対速度に基づいて他方のビートからペアリングできなかったピーク信号のペアリング対象を検索する手段と、を有することを特徴とする。
(もっと読む)
衝突検出装置
【課題】本発明の目的は、自車の側方から接近してくる他車を効率的に検知することができる、衝突検出装置を提供する。
【解決手段】衝突検出装置は、自車前方右側の他車を検出する右側レーダと、自車前方左側の他車を検出する左側レーダと、制御部と、安全システムとを備える。制御部は、各レーダの検出結果に基づいて、自車の側方より接近してくる他車と衝突の危険があるか否か、衝突が避けられるか否かを判断する。安全システムは、制御部からの指示に従って、ドライバーに注意喚起をしたり、ブレーキ操作をアシストしたりする、安全処置を行う。また、各レーダの検出方向中心軸は、車両の直進方向に対して左右いずれかの方向に20°乃至60°の範囲内の向きに設定される。
(もっと読む)
汚れ判定装置
【課題】レーダセンサのレーダ波受信面の汚れを精度良く判定する汚れ判定装置を提供する。
【解決手段】監視対象周波数領域から抽出した監視対象ピークの電力値を、変調区間毎かつ受信チャンネル毎に算出し、変調区間毎に、電力値が最大となる最大チャンネルに対する各受信チャンネルの電力値の偏差(チャンネル偏差)を算出する(S210〜S250)。算出したチャンネル偏差に従って、各受信チャンネルに対応付けられた前判定値CPをカウントすると共に、車速Vが下限車速Vth以上、かつ受信チャンネルの中に前判定値CPが前判定閾値CPth以上のものが存在する場合に、車速Vに応じて算出される更新値Kにより汚れ判定値CDを更新し、その汚れ判定値CDが汚れ判定閾値CDth以上であれば、レーダ波の受信面に汚れが生じていることを表すダイアグ情報をONにする(S260〜S320)。
(もっと読む)
物体検知装置
【課題】自車両の外界に検知された物体が虚像か実像かを容易かつ適切に判定する。
【解決手段】物体検知装置10は、自車両の進行方向に存在する物体を検知する外界センサ11および物体位置検出部31と、検知された物体の自車両に対する相対距離に係る相対関係を算出する相対関係算出部32と、検知された物体が虚像か実像かを判定する虚実判定部34とを備え、自車両に相対する向きに移動する第1物体および第2物体が検知された場合に、第1物体と第2物体との間の車両左右方向距離が所定左右方向距離以上であり、かつ、第1物体と第2物体との間の車両前後方向距離が所定前後方向距離以下である場合に、第1物体および第2物体を判定対象として選択する判定対象選択部33を備え、虚実判定部34は、判定対象選択部33により選択された判定対象が虚像か実像かを判定する。
(もっと読む)
車両用物体認識装置
【課題】車間距離制御に対する適応性を維持しつつ、道路を横断する歩行者等の所定物体を適切に監視すること。
【解決手段】電磁波を放射すると共に該放射した電磁波の反射波を受信する電磁波放射受信手段(14、20)と、該電磁波放射受信手段が受信した反射波のデータに基づいて物標との距離及び横位置を含むデータを算出する物標位置データ算出手段(27)と、該物標位置データ算出手段の算出結果に基づいて車両周辺の物体を認識する物体認識手段(30)と、を備える車両用物体認識装置(1)であって、前記物体認識手段は、前記電磁波放射受信手段における受信波強度に関する所定条件を満たす所定物体以外の物体については、第1の認識モードで障害物認識を行ない、前記所定物体については、前記第1の認識モードに比して物体接近時の横位置応答性が高い第2の認識モードで障害物認識を行なうことを特徴とする。
(もっと読む)
物体検知装置
【課題】所定範囲内で検知した複数の物体を統合して単一の物体として認識する際に所定範囲を適切に設定する。
【解決手段】物体検知装置10は、自車両の進行方向の検出対象領域に電磁波を発信し、物体からの反射波を受信する外界センサ11と、外界センサ11の検知結果に基づき、自車両に対する物体の位置および絶対速度を算出する物体位置検出部31および絶対速度算出部32と、所定統合範囲内に対して複数の異なる反射波が受信された場合に、少なくとも物体の位置に基づき、所定統合範囲内の複数の物体を統合して単一の物体として認識する物体統合部33とを備え、物体統合部33は、複数の物体のうち任意の物体の位置を基準として略矩形状の所定統合範囲を設定し、任意の物体の絶対速度に基づき、所定統合範囲の前後方向幅および左右方向幅を互いに独立に設定する。
(もっと読む)
車両用物体認識装置
【課題】横方向に移動する物体に関してピーク周波数探索範囲を適切に設定すること。
【解決手段】電磁波放射受信手段が受信した反射波のデータについてピーク周波数探索範囲を設定し、ピーク周波数探索範囲においてFM−CW方式におけるビート周波数を特定することにより物標との距離及び横位置を含む物標位置データを算出する物標位置データ算出手段と、物標位置データ算出手段が算出した物標位置データに基づいて車両周辺の物体を認識する物体認識手段と、を備える車両用物体認識装置であって、物体認識手段の物体認識は、物体の横位置を予測する処理を含み、物標位置データ算出手段は、物体認識手段が予測した物体の横位置に基づきピーク周波数探索範囲を当初設定し、物体認識手段が予測した物体の横位置と自己が算出した物標の横位置との比較に基づきピーク周波数探索範囲を補正することを特徴とする。
(もっと読む)
車両周辺監視装置、車両、車両周辺監視プログラム
【課題】撮像装置を通じて対象物の検出される一方、レーダを通じてこの対象物の存在が明確に認識されない場合でも、車両からこの対象物までの距離を高精度で測定することができる装置等を提供する。
【解決手段】本発明の車両周辺監視装置10によれば、赤外線カメラ(撮像装置)11の撮像領域を構成する一の対象領域において複数の対象物が検出され、かつ、各対象物について異なる測定距離が測定された場合、第1対象物の測定距離が、レーダ装置12により取得された反射強度データに基づき、反射強度が最高のピークを示す「第1距離」に補正される。また、当該複数の対象物のうち第i+1対象物(i=1,2,‥)の測定距離が、反射強度データに基づいて第i+1対象物の測定距離を基準とし、かつ、第1距離ないし第i距離のすべてを包含しない第i+1距離範囲において反射強度が最高のピークを示す「第i+1距離」に補正される。
(もっと読む)
レーダ装置、及び物標検出方法
【課題】物標のX座標の変位量が大きい場合があっても、高い確度で物標の位置の連続性が維持されるように物標の位置の推定を行う。
【解決手段】物標の位置が検出されないスキャンでは、当該物標の過去の軌跡がY軸付近の所定領域に含まれる場合は、前回の位置のX座標から、前記軌跡より推測されるX座標に第1の変位量さらに変位したX座標を有する位置を推定位置とし、前記軌跡が前記所定領域に含まれない場合は、前回の位置のX座標から、前記軌跡より推測されるX座標に第1の変位量より大きい第2の変位量さらに変位したX座標を有する位置を推定位置とする。
(もっと読む)
物体検出装置
【課題】本発明は、車両が置かれている環境下で検出すべき物体を適切に検出することができる、物体検出装置の提供を目的とする。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両の動作情報を検知する動作情報検知手段(車載ECU40,車載センサ50)と、自車両の存在地点についての環境情報を検知する環境情報検知手段(ナビゲーション装置30)と、前記動作情報検知手段によって検知された動作情報と前記環境情報検知手段によって検知された環境情報との取得結果に基づいて、前記物体の検出対象を変更する検出対象変更手段(物体検出ECU10)とを備えることを特徴とする、物体検出装置。
(もっと読む)
レーダ装置
【課題】目標までの距離に応じて最適な距離分解能・相対速度分解能を設定可能なレーダ装置を提供する。
【解決手段】周波数変調すると共にパルス化した電波を送受信して目標203までの距離と相対速度を求めるFMパルス方式のレーダ装置において、送信タイミングから一定時間毎にサンプリングタイミングを定めるレンジゲート手段205と、レンジゲート毎に、周波数上昇区間あるいは周波数下降区間においてサンプリングを行うサンプリング手段206と、サンプリング手段206で得られたサンプリングデータをもとに、フーリエ変換の入力として用いる計測用データを設定し、計測用データの初めから終わりまでのサンプリングに要した時間を計測時間とした時、レンジゲート毎に計測時間を変更する計測時間変更手段207を備える。
(もっと読む)
レーダ装置
【課題】電波の壁などからの反射により発生するゴーストを高精度に判定することができるレーダ装置を提供する。
【解決手段】レーダ装置において、反射特性判定手段は、側方の壁の反射特性を取得する。反射特性判定手段は、取得した壁の反射特性が所定の閾値以上であるか否かを判定する。仮想壁設定手段は、取得した壁の反射特性が所定の閾値以上である場合に、検出したターゲットの側方に仮想壁を設定する。対称位置判定手段は、仮想壁を側方に設定したターゲットに対して、仮想壁と対称な位置にターゲットがあるか否かを判定する。速度判定手段は、仮想壁と対称な位置にターゲットがあった場合に、仮想壁と対称な位置にあるターゲットの速度が、所定の範囲内にあるか否かを判定する。ゴースト判定手段は、仮想壁と対称な位置にあるターゲットの速度が所定の範囲内にある場合に、仮想壁と対称な位置にあるターゲットをゴーストと判定する。
(もっと読む)
車両の走行制御装置
【課題】 停車時にレーダー装置の出力を低減した場合でも、先行車をロストすることなく確実な追従走行制御を行えるようにする。
【解決手段】 車速センサSbが自車の停車状態を検出すると、送信出力制御手段M1がレーダー装置Saの送信出力を走行時送信出力よりも低い停車時送信出力とする。自車停車中にレーダー装置Saにより自車と先行車との距離の増加が検出された場合、あるいは自車停車時にレーダー装置Saにより検知された先行車との距離が所定値よりも大きい場合に、報知手段M3が乗員に対して追従走行制御が可能なことを報知し、送信出力制御手段M1がレーダー装置Saの送信出力を停車時送信出力よりも増加させる。これにより、先行車との距離が追従走行制御手段M2による先行車に対する追従走行制御が可能な状態になったときにレーダー装置Saの送信出力を増加させ、先行車をロストすることなく確実に追従走行制御に移行することができる。
(もっと読む)
測定装置および方法
【課題】より少ない演算量で対象物に関係する情報を演算する。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
(もっと読む)
物体検出装置
【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
61 - 80 / 225
[ Back to top ]