
Fターム[5J070BG02]の内容
レーダ方式及びその細部 (42,132) | 表示 (572) | 表示媒体 (216) | CRT (17)
Fターム[5J070BG02]に分類される特許
1 - 17 / 17
移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラム
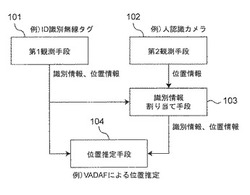
【課題】移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招かず、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置及び方法、並びに、移動体位置推定プログラムを提供する。
【解決手段】識別情報割り当て手段103は、移動体の識別情報と位置情報を低頻度で出力する第1の観測手段101から観測値が得られる時点Aと、時点Aの次に観測手段101から観測値が得られる時点B、及び、時間区間ABにおいて、移動体の位置情報を高頻度で出力する第2の観測手段102から得られる観測値の系列に対して、時点A、Bにおける第1の観測手段101の観測値と第2の観測手段102の観測値の位置の近さが最小になるように、及び、時間区間ABにおける観測手段102の観測値の移動量の合計が最小になるように、第2の観測手段102の観測値に対して第1の観測手段の観測値に含まれる識別情報を割り当てる。
(もっと読む)
情報表示装置

【課題】所定の地点の近傍の詳細な情報と当該地点の遠方の情報とを同時に表示可能な情報表示装置を提供する。
【解決手段】レーダ指示器(情報表示装置)は、取得部と、制御部と、を備える。取得部は、移動体(他の船舶)、移動時(航海時)の目印となるランドマーク、及びユーザに登録されたポイント(ユーザ登録ポイント)のうち少なくとも1つからなる表示対象の位置情報を取得する。制御部は、自船の位置情報及び自船の周辺情報をレーダ映像表示領域35aに表示するとともに、表示対象の位置がレーダ映像表示領域35aの外側となる少なくとも1つの表示対象を、表示対象が位置する方向に対応させて、レーダ映像表示領域35aの外周部35bに表示する。
(もっと読む)
スクラップ表面プロファイル計測方法
【課題】容器内に積層されたスクラップ表面までの距離を適正に計測して容器内のスクラップの表面プロファイルを高精度に計測することができるスクラップ表面プロファイル計測方法を提供すること。
【解決手段】電磁波距離計測部11は、容器2内のスクラップ21表面上に、容器2内のスクラップ21のうちの大きいスクラップ21のサイズと同程度またはそれ以下の大きさのスポットが照射されるように調整されたビーム幅の電磁波をアンテナ111から送信し、アンテナ111によってその反射波を受信することで容器2内のスクラップ21表面までの距離を計測する。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、自動利得制御部10を備えている。自動利得制御部10は、データ抽出部11と、閾値算出部12と、利得制御部13と、を備えている。データ抽出部11は、受信信号をサンプリングした受信データ系列の中から、信号レベルが距離方向でランダムに変動する受信データを、陸及び物標からのエコーを含まない受信データである雨雪/ノイズデータとして抽出する。閾値算出部12は、前記雨雪/ノイズデータに基づいて、雨雪反射及び受信機雑音を除去するための雨雪反射等除去閾値を算出する。利得制御部13は、前記受信データの信号レベルと、雨雪反射等除去閾値と、を比較し、信号レベルが雨雪反射等除去閾値以上の受信データのみを選択して出力する。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、区間判定部11を備える。区間判定部11は、受信信号をサンプリングした受信データ系列の中から、所定の距離範囲内の受信データを抽出し、当該抽出された受信データに基づいて、当該距離範囲が「陸/物標区間」であるか「雨雪/ノイズ区間」であるかを判定する。このレーダ装置は、受信データに含まれる雨雪反射を、雨雪反射除去閾値に基づいて抑圧するように構成される。内部データ根拠閾値算出部14は、「雨雪/ノイズ区間」であると判定された距離範囲についてのみ、当該距離範囲内の受信データに基づいて、当該距離範囲に対する雨雪反射除去閾値としての内部データ根拠閾値を求める。
(もっと読む)
信号処理装置、この信号処理装置を備えるレーダ装置及びその信号処理装置の画素抜け検出方法
【課題】方位を異ならせて探知信号を送信するとともに、画素がマトリクス状に配列されて構成される画像に、エコー信号に基づく情報を描画して表示器に表示する信号処理装置において、様々な位置及び大きさで発生する画素抜けを確実に検出できる構成を提供する。
【解決手段】レーダ装置が備える画素抜け検出部は、今回描画するスイープラインである今回スイープラインの画素の位置と、前回処理したスイープラインである前回スイープラインの画素の位置と、に基づいて画素抜け検出を行う。より具体的には、前記画素抜け検出部は、今回スイープライン上の画素である注目画素と、この注目画素にX軸方向又はY軸方向で対応する前回スイープライン上の画素である対応画素と、に挟まれる1以上の中間画素が存在するときに、当該中間画素を画素抜け部分と判定する。
(もっと読む)
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
レーダ追尾装置、レーダ追尾方法及びプログラム
【課題】探知能力を向上させることが可能なレーダ管制装置、レーダ追尾方法及びプログラムを提供する。
【解決手段】PARを用いたレーダ管制装置において、外部システム1から入力した航空機の飛行情報に基づいて、時刻毎の着陸誘導機数を算出し、前記着陸誘導機数に応じてPAR3の時刻毎の追尾ビーム数を制御する制御手段2を備える。
(もっと読む)
状況表示装置
【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
目標物体の検出および追尾を行うシステムおよび方法
【課題】目標物体の高度の計算を含む、目標物体の検出および追尾を行うシステムならびに方法を提供する。
【解決手段】受信機によって受信された信号の処理中に、このシステムは、送信機によってブロードキャストされた信号により形成される干渉効果パターンによって変更された信号から、目標物体の高度を計算するか、または、3以上の送信機に関連付けられた幾何学形状の計算およびそれらの形状の交点を求めることから、目標物体の高度を選択的に計算する。
(もっと読む)
レーダ情報表示装置
【課題】 管制情報と気象情報とをこれらの予測を含め関連づけして把握することが可能な、航空管制の安全性向上に寄与するレーダ情報表示装置を得る。
【解決手段】 管制レーダ等により取得された管制レーダ情報と、気象レーダ等により取得された気象レーダ情報を受けとって、それぞれに順次記憶し、航跡及び気象状況としてその履歴を保持する。また、これらの記憶に基づき所定時間経過後までの航跡及び気象状況を予測する。そして、表示に際しては、これら履歴及び予測結果の所定時間遡った時刻から所定時間経過後の時刻にわたる時間幅分に対して、管制レーダ情報及び気象レーダ情報を同一画面上に重畳して統合表示する。
(もっと読む)
不要追尾目標除去装置
【課題】本発明は不要な追尾目標の捕捉を防止する不要追尾目標除去装置を提供する。
【解決手段】レーダ機能に基づき追尾目標を追尾する追尾制御手段30に対し不要な追尾目標を除去する制御を行う不要追尾目標除去装置3Aである。追尾目標の追尾目標距離情報及び追尾目標方位情報と、レーダ設置位置の緯度経度情報に基づき追尾目標の緯度経度を算出する追尾目標位置情報算出手段62と、追尾目標位置情報を基点とする追尾目標周辺領域を生成する追尾目標周辺領域生成手段63と、電子図データを構成する図形構成要素の特徴をもとに、図形構成要素と追尾目標周辺領域との包含関係を判定し、追尾目標周辺領域内に図形構成要素が含まれると判定すると追尾中止命令を出力する包含関係判定制御手段を含む。
(もっと読む)
情報表示装置
【課題】1つの表示画面上に各種情報処理端末から得られた動的な情報をリアルタイムに表示しつつ、ユーザが簡単な操作によって所望の機能選択を実行できる情報表示装置を提供することを目的とする。
【解決手段】表示画面上に表示中のメニュー項目の階層を容易に把握できるようにメニュー項目の内容とともに階層に関する情報100、101を表示し、表示したメニュー項目の選択をロータリーエンコーダなどの回転操作部52を用いて操作するようにした。
(もっと読む)
レーダ情報処理装置、レーダ画面表示プログラム
【課題】処理負荷を軽減した航空機等の位置表示を可能にする。
【解決手段】レーダ装置10により測定された航空機の位置を示すレーダ情報をもとに、航空機を表すシンボルをレーダ画面に表示するレーダ情報処理装置12であって、時間経過に伴うシンボルの変化を定義するパラメータを記憶するシンボルパラメータ記憶部27が設けられる。表示機能部24には、シンボルパラメータ記憶部27に記憶されたパラメータに応じてシンボルをレーダ画面に表示させるシンボル表示部421,422,423〜42nと、レーダ装置10により所定時間毎に測定された各レーダ情報に対応するレーダ画面の各位置において、個々にシンボル表示部421,422,423〜42nによってシンボルを表示させるシンボル表示制御部40とを設ける。
(もっと読む)
合成開口レーダ画像表示装置
【課題】 本発明は、SAR画像中における移動目標の視認性を向上させる。
【解決手段】 移動目標信号を抽出して出力するMTI帯域制限部4で抽出された移動目標信号を予め設定された閾値レベルLを超えた信号成分を出力する検出部10を有する。
検出部10は、閾値レベルLとの比較により、クラッタ等の雑音成分や固定目標の消え残りを除去して移動目標信号を検出するとともに、検出した移動目標を必要に応じて増幅出力するように構成したので、固定目標とは明瞭に区別して表示された表示器上で、移動目標の位置や形状等を正確に把握することができる。
(もっと読む)
レーダ装置
【課題】短時間で目標上の電波反射点の空間位置を算出し、目標の3次元形状を算出できるレーダ装置を得ることを目的とするものである。
【解決手段】目標による反射電波を互いに異なる位置にある2つの受信手段からなる一組の受信手段で受信し、目標上の電波反射点に対応するレンジ及びドップラー周波数からなる電波反射点情報を算出する。算出された電波反射点情報をそれぞれに対応する目標上の電波反射点が一致する一組の電波反射点情報として対応付けを行い、一組の電波反射点情報並びに目標と一組の受信手段との相対位置及び相対運動から目標上の電波反射点の空間位置を算出するようにしたものである。
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。  (もっと読む)
(もっと読む)
1 - 17 / 17
[ Back to top ]