
Fターム[5J083AD02]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 位置 (536) | 音源の位置 (157)
Fターム[5J083AD02]に分類される特許
1 - 20 / 157
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
位置出力装置、位置出力システムおよびプログラム
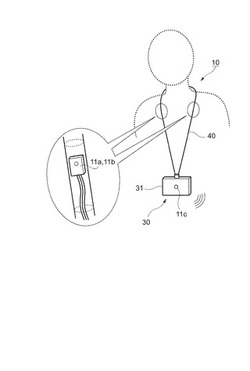
【課題】音声を発生する話者の三次元位置を、より良好に把握することができる位置出力装置等を提供する。
【解決手段】装着者の口からの距離が互いに異なる2つと水平方向の距離が離れた2つを含み話者の音声を取得する少なくとも3個以上設けられるマイクロフォン11a,11b,11cと、装着者の口からの距離が互いに異なる2つのマイクロフォン11a、マイクロフォン11cで取得される音声の音圧差に基づいて、話者が装着者か他者かを識別する識別手段と、識別手段によって話者が他者と識別された場合に、話者の三次元位置を導出するための数値計算の初期値を選択する初期値選択手段と、初期値選択手段により選択された初期値を用いた数値計算により話者の三次元位置を導出する位置導出手段と、を備えることを特徴とする端末装置10。
(もっと読む)
音源検出装置

【課題】誤検出を低減させ、検出性能を向上させることが可能な接近車両検出装置を提供する。
【解決手段】集音器13,14,15,16により集音された音に基づいて所定の音源を検出する音源検出装置であって、集音された音信号から雑音を抽出する雑音抽出部21と、集音された音信号から雑音抽出部21により抽出された雑音の信号成分を抑制する雑音抑制部22とを備え、音源検出部24が雑音抑制後の音の情報を用いて接近車両等、所定の音源の位置を検出する。このように、音源検出装置は、雑音の信号成分を抑制した音を基に必要な所定の音源の位置を検出するため、雑音の影響を予め排除し、必要な音源のみを検出することができる。
(もっと読む)
位置計測装置及びその方法
【課題】環境ノイズが大きなレベルの調査環境下であっても、遮蔽物内の被計測対象の特定位置を前記遮蔽物外から探査する装置を提供する。
【解決手段】遮蔽物内の被計測対象100の特定位置を遮蔽物外から計測する場合に、被計測対象100の特定位置に電磁波及び音響波を定期的に同時に発信する発信装置200を装着し、遮蔽物外に配置される探査装置300にて、発信装置200からの電磁波を受信すると共に互い異なる複数の位置で音響波を受信してそれぞれの受信結果から被計測対象100の特定位置を探査する。探査装置300は、電磁波が受信されてから複数の位置でそれぞれ音響波が受信されるまでの時間を計測し、時間計測結果から電磁波と音響波との速度差に基づいて複数の音響波受信位置における発信装置200との相対距離を求め、複数の音響波受信位置における発信装置200との相対距離に基づいて発信装置200の相対位置を特定する。
(もっと読む)
位置測定システム
【課題】従来技術に比較して高精度で端末の位置を測定することができる位置測定システムを提供する。
【解決手段】位置測定システムは、マイクロホンアレイを備えた複数のノードが相互にネットワークで接続されかつ時刻同期されたマイクロホンアレイ・ネットワークシステムを用いて、各ノードの位置を推定する制御部を備える。各ノードは、マイクロホンアレイで受信した、1つのノードからのサウンド信号に基づいて、サウンド信号の到来方向の角度を推定する音源推定処理部と、サウンド信号の送信時刻と受信時刻との差分とサウンド信号の速度に基づいて、サウンド信号を送信したノードからの距離を推定する距離推定部と、推定された到来方向の角度及び距離を他のノードに対してデータ通信で送受信するデータ通信部とを備え、制御部は、推定された到来方向の角度及び距離に基づいて、各ノードの位置を推定して計算する。
(もっと読む)
音源定位装置
【課題】音源定位とそれら音源の属性の判定とを行なうことができる音源定位装置を提供する。
【解決手段】音源定位装置は、人の位置を検出するLRF(レーザレンジファインダ)群56と、マイクロホンアレイ群52の出力から得られる複数チャンネルの音源信号の各々と、マイクロホンアレイに含まれる各マイクロホンの間の位置関係と、LRF群56の出力とに基づいて、複数の方向の各々について、所定時間ごとにMUSICパワーを算出し、そのピークを音源位置として所定時間ごとに検出する音源定位処理部60と、マイクロホンアレイの出力信号から、音源定位処理部60により検出された音源位置からの音声信号を分離する音源分離処理部70と、分離された音声信号の属性を人位置計測装置58の出力を用いて高精度で判定する音源種類同定処理部72とを含む。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】対象の所在確認および追跡を行う自律型超音波屋内追跡システムを用いて対象の所在確認ならびに位置決定を行なう方法を提供する。
【解決手段】自律型超音波屋内追跡システム(AUITS)200は、RF信号および超音波信号を送信するためのRF送信器205および超音波送信器206を含む移動するタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し対象の所在を確認する位置決定機能(POD)202とを備える。PODは複数のリーフモジュールから構成され、各リーフモジュールには位置信号の超音波受信器があり、タグ装置から送信された超音波位置信号を受信する。リーフモジュール間には既知の構造トポロジー関係があり、各超音波受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、位置計算ユニット210で対象の位置が計算される。
(もっと読む)
位置検出装置、ウェアラブルセンサシステム及びプログラム
【課題】簡単、安価な構成で高精度に位置検出を行う。
【解決手段】3個の受信機までの3つの距離をベクトルとしたデータベースが予め登録された記憶部と、各受信機が出力する送信機と各受信機との間の距離に依存する距離情報に基づいてデータベースを探索して初期位置を用いて連立非線形方程式を解いて移動部分の位置を検出する検知処理部は、距離情報をフィルタリングしてデータベースの探索用距離情報を取得する第1のカルマンフィルタと、動的に調整されて移動部分の位置状態を推定する位置状態推定用の第2のカルマンフィルタを含むように構成する。
(もっと読む)
画像表示装置及び画像表示装置に用いる集音手段
【課題】超音波の到来方向の検出に有益な集音手段、超音波を発する音源位置を特定し可視化した画像表示装置を提供する。
【解決手段】カメラの撮像画像を表示する表示手段と、少なくとも2つのマイクロフォンM3、M4を有する集音手段15と、音源が発する超音波が少なくとも2つのマイクロフォンに到達する時間差に基づき音源位置を算出する音源位置算出手段と、表示手段に表示された撮像画像内に音源位置を識別する画像を表示する制御を行う表示制御手段とを備えた画像表示装置で、集音手段は、少なくとも2つのマイクロフォンをそれぞれ覆い、基端C、Dを閉塞して先端に各マイクロフォンの集音方向へ開口する集音孔H3、H4を形成し、基端から先端に向けて先細りする形状の筒状部材17C、17Dを有し、少なくとも2つの筒状部材を、先端が互いに接近するように配置することで、集音孔同士の間隔Yを超音波の半波長未満にした。
(もっと読む)
画像表示装置
【課題】超音波を発生させる音源位置を特定して可視化でき、音源位置の特定精度の低下を抑制した画像表示装置を提供する。
【解決手段】第1のマイクロフォン群M1、M2及び第2のマイクロフォン群M3、M4で検出した超音波の伝搬速度の補正温度を設定する補正温度設定手段と、第1のマイクロフォン群への超音波の到達時間差及び補正温度に基づき、第1の方向に対する音源への角度を算出すると共に、第2のマイクロフォン群への超音波の到達時間差及び補正温度に基づき、第2の方向に対する音源への角度を算出し、第1及び第2の方向に対する角度から音源位置を算出する音源位置算出手段と、音源位置算出手段で算出した音源位置と、音源位置に対応させて表示領域に表示する撮像画像内における表示位置とを相関付けする相関手段と、相関手段で音源位置と相関付けされた表示位置に、音源位置の識別画像を表示する制御を行う表示制御手段と、を備える。
(もっと読む)
微小孔の検査装置およびその検査方法
【課題】被検査物における微小孔の位置のみならずその大きさの検出を可能とする微小孔の検査装置および方法を提供する。
【解決手段】被検査物Aの検査領域A1の、一方の側に可聴音発生装置1を配置し、他方の側で音圧を測定する一対のマイクロホン2、3を2次元的に走査させ、出力信号をそれぞれ取り込み、取り込んだ出力信号に基づいて音響インテンシティを測定して検査領域A1の微小孔aの位置を検出し、さらに測定された音響インテンシティの傾きを算出して傾きの大きさに基づいて微小孔aの大きさを検出する。
(もっと読む)
位置算出装置、位置算出方法および位置算出プログラム
【課題】手の位置の誤検出を防止すること。
【解決手段】位置算出システムは、超音波発信機10、超音波受信機20a〜20c、位置算出装置100を有する。位置算出装置100は、超音波受信機20a〜20cから超音波の受信時間を取得し、超音波発信機10から音波が発信された時間から超音波受信機20a〜20cに超音波が到達するまでの到達時間を超音波受信機毎に特定する。位置算出装置100は、特定した複数の到達時間と、利用者1の人体の特徴から導かれる音波の到達時間とを基にして、到達時間を利用して超音波発信機10の位置を算出するか否かを判定する。位置算出装置100は、判定結果に基づいて、超音波発信機10の位置を利用者の手の位置として算出する。
(もっと読む)
音源位置推定装置、音源位置推定方法および音源位置推定プログラム
【課題】マイク数および演算量を増やすことなく、騒音環境において音源の発する音の到来方向を推定する精度を向上させる。
【解決手段】音源位置推定部3は、受音点1,2から入力した各観測音を用いて、音源位置がある地点に存在する尤度を算出する。音源位置補正部5は、予め与えられた事前分布4、または音源位置推定部3が過去に算出した尤度から推定した事前分布4を用いて、音源位置推定部3が算出した現在の音源位置の尤度を補正して、音源位置を定位する。
(もっと読む)
音源推定方法及び音源推定装置
【課題】観測点で採取した音の音圧信号と映像信号とから音源を推定するとともに、推定された音源と観測点との距離をリアルタイムで算出する。
【解決手段】マイクロフォンM1〜M5とカメラとを備えた音・映像採取ユニットを第1の観測点P1に配置して音圧信号と映像信号とを採取し、マイクロフォンM6〜M9を備えた音採取ユニットを第2の観測点P2に配置して音圧信号を採取し、これらの音圧信号をA/D変換した音圧波形データを用いて推定した第1の観測点P1からみた音源方向の水平角θ1及び仰角φ1と第2の観測点P2からみた音源方向の水平角θ2とから第1の観測点P1と音源との距離Lを求めるとともに、第1の観測点P1で採取した映像信号をA/D変換した画像データと水平角θ1と仰角φ1とを用いて作成した画像中に音源の方向を示す図形が描画された音源推定用画像Gkと距離Lのデータとを表示画面に表示するようにした。
(もっと読む)
水中位置探知システム、水中位置探知システムに用いられる超音波発信手段および船側受信手段、ならびに水中位置探知方法
【課題】母船から見たダイバーの3次元的な位置を正確に把握することを可能とする水中位置探知手段を提供する。
【解決手段】水中位置探知システム11は、ダイバーA側に取り付けられる超音波発信装置12から発信される超音波20を、船S側に設けられる船側受信装置13によって受信し、水中におけるダイバーAの位置を探知するためのシステムである。ここで、船側受信装置13は、複数の超音波マイクロフォン18を有する超音波受信装置21と、発信同期信号22Sと超音波信号との間の時間差τを出力する比較装置23と、比較装置23によって出力された時間差τに基づいて、ダイバーAと超音波マイクロフォン18との間の距離Lを計算する距離演算装置24と、距離Lに基づいてダイバーAの3次元座標を計算する座標演算装置25と、ダイバーAの座標を画像に表示する画像表示装置26とを有する。
(もっと読む)
行動認識装置、行動認識方法および行動認識プログラム
【課題】人物の行動を正確に認識すること。
【解決手段】行動認識装置100は、超音波発信機10、超音波受信機20a〜20cに接続される。行動認識装置100は、超音波発信機10からモノIDと検知時間を取得する。また、行動認識装置100は、超音波発信機10から超音波受信機20a〜20cまでの距離の情報を取得する。そして、行動認識装置100は、利用者1の身体周辺を複数の領域に分割し、利用者の手の位置が含まれる領域の推移のパターンと、利用者が利用する物体の種別から、利用者の行動を認識する。
(もっと読む)
超音波測定用プローブの位置検出方法およびその位置検出装置
【課題】超音波測定用プローブ位置の誤検出を防止することができる超音波測定用プローブの位置検出方法およびその位置検出装置を提供すること。
【解決手段】超音波測定用プローブ1の位置に設けられ、超音波測定用プローブ1の位置から2種類の伝搬速度が異なる波動である赤外線および超音波を同時または所定間隔をおいて送波する赤外線送波器11および超音波送波器10と、予め既知の位置に所定の間隔Lを隔てて配置され、前記送波された各波動を受波する複数の受波器15a,15bと、各受波器15a,15bが検出した前記2種類の波動の到達時間差をもとに超音波測定用プローブの位置を検出する演算処理回路と、を備える。
(もっと読む)
地主土地境界表示音波発振装置および三角測量基準点受信位置測定装置を備えた、農地調整利用方法。
【課題】狭い個人所有の農地を一つに集めて、広大な調整農地として形成して、効率の高い農業に寄与する、農業協力技術を提供する。
【解決手段】個人持分農地A1の境界に、耐腐食性金属で形成された境界点クイa2、境界点クイb3、境界点クイc4、境界点クイd5を埋設する。順次、個人持分農地B〜個人持分農地Zと境界点を埋設して、個人持分農地を集合させた一つの広大調整農地6を形成する。広大調整農地6に基礎三角点クイX7、基礎三角点クイY8、基礎三角点クイZ9を、クイ頭部を地中より出した状態にて埋設する。このように一つの広大調整農地6として、表面上は使用されるが、個人持分農地A1を視認するため、埋設された境界点クイの正確な位置に小形金属探知器付音波発振器を差し込んで固定し、さらに基礎三角点クイの頭頂部に、着脱式音波受信位置測定器を設け、ノートパソコンを接続する。
(もっと読む)
位置情報提供装置、位置情報提供方法、位置情報提供システム、及びプログラム
【課題】地図上における音の発信位置を提供する。
【解決手段】位置情報提供装置10は、音データの発信位置を示す音位置情報を取得する音位置情報取得部123と、上記音データの発信位置を示すアイコンを地図上に重畳した地図表示画面の表示を制御する表示制御部153とを有する。
(もっと読む)
ドリルヘッド位置推定システム、ドリルヘッド位置推定装置及びドリルヘッド位置推定方法
【課題】電磁波の減衰の影響を受けずに、また電磁波を探索する作業を伴わずに、地中のドリルヘッドの三次元位置を推定する、ドリルヘッド位置推定装置及びドリルヘッド位置推定方法を提供する。
【解決手段】HDD工法における地中のドリルヘッドの位置を推定するために、従来技術の電磁波の代わりにドリルヘッド先端から音を発生させ、地表に複数設けたセンサユニットで受信する。センサユニットに到達する音の時間差とセンサユニット同士の距離に基づいて演算し、ドリルヘッドの位置を推定する。また、ドリルヘッドの進行方向の反対側のセンサユニットから得られるデータは、音がドリルヘッドを回転駆動する駆動パイプを伝うために誤差が大きくなってしまう。そこで、無効になったセンサユニットを、備え付けられているLEDを発光制御させることにより、有効なセンサユニットと無効なセンサユニットとの、目視での判別を容易にすると共に、おおよそのドリルヘッドの位置が把握可能になる。
(もっと読む)
1 - 20 / 157
[ Back to top ]