
Fターム[5J083AE04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180) | 魚 (117)
Fターム[5J083AE04]に分類される特許
61 - 80 / 117
自動追尾スキャニングソナー
【目的】
ソナーにおいて送信波が標的に反射してから自船の探知部に到達するまでの間に、自船が移動してしまうことによる誤差を抑える。
【構成】
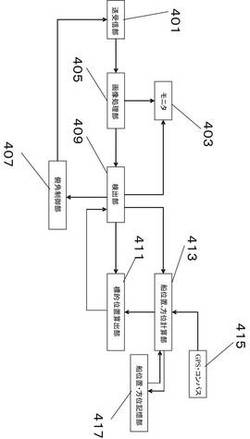
自動追尾スキャニングソナーにおいて、GPS及びコンパスの指示値の時系列データを保持するメモリを有し、過去の任意の時刻における自船の緯度、経度、船首方位を推定することができる船位置・方位計算部と、標的からの反射波を自船で受信した時刻における標的の緯度、経度、水深を算出する標的位置算出部とを備える事を特徴とするスキャニングソナー。
(もっと読む)
水中探知装置

【課題】水中情報を3次元映像としてより一層分かりやすく表示することができ、描画処理も簡単に行える水中探知装置を提供する。
【解決手段】
超音波ビームを水中に送信して3次元領域をスキャンし、受信したエコーに基づいてスキャン領域内の水中情報を3次元映像として表示する水中探知装置であって、受信ビームを所定のサンプリングレートでサンプリングして、受信ビームごとに各サンプリング点におけるエコーレベルを取得し、各サンプリング点を基準として得られるポリゴンの集合体であるエコーメッシュを、水中の所定方向に複数形成し、形成した各エコーメッシュにおけるポリゴンの各頂点のエコーレベルと閾値とを比較して、着色すべきポリゴンを再作成し、再作成したポリゴンに対して所定の着色処理を施し、ポリゴンに着色がされた各エコーメッシュを重ね合せて3次元映像を表示する。
(もっと読む)
パルス信号の送受信装置および送受信方法
【課題】パルス圧縮されたエコー信号のレンジサイドローブの振幅を小さくすることのできる、パルス信号の送受信装置および送受信方法を提供する。
【解決手段】信号生成部11は、ガウス関数で振幅制御されたダイナミックレンジ30dB、40dBのチャープ信号からなる送信信号および参照信号を生成する。参照信号は、フィルタ係数としてマッチドフィルタ7の係数メモリに設定される。また、送信信号と略同じ波形の送信パルスが振動子1から送信され、エコー信号が振動子1で受信される。補正フィルタ6は、A/D変換器5でデジタル化されたエコー信号に対して、ダイナミックレンジを拡大する補正および波形歪みを除去する補正を施す。マッチドフィルタ8は、補正フィルタ6で補正されたエコー信号と係数メモリに設定された参照信号との相関演算を行うことにより、パルス圧縮されたエコー信号を出力する。
(もっと読む)
魚群探知機
【課題】魚探画面において、魚群と水底の堆積層の詳細な状態を同時に把握することは困難だった。
【解決手段】対象を探知する探知信号を送信し、反射信号を受信する送受信部と、反射信号に基づいて水深または水底を検出する検出部と、反射信号を可視化する際、反射信号のうち、水深または水底を基準としてユーザからの設定により定まる境界の上方の反射信号からユーザからの設定による第一の感度で第一の対象を選別可能とし、境界の下方の反射信号から第一の感度とは異なるユーザからの設定による第二の感度で第二の対象を選別可能とし、表示処理部は、境界の上方を一つの探知画像の第一表示領域に表示させ、境界の下方を一つの探知画像の第一表示領域より下方の第二表示領域に表示させる魚群探知機とする。
(もっと読む)
舶用機器ネットワークシステム
【課題】同種の航法データが複数存在しても、全ての表示器で共有の航法データを利用させる。
【解決手段】ディスプレイユニット12で共有対象のセンサ24が選択され、サーバ装置11でセンサ24を対象とする共有ソース設定指示データが生成、送信される(S601〜S604)と、LAN機器13は、センサ22からの航法データの出力を停止し(S608)、LAN機器14は、センサ24の航法データの第一通信網100への出力を開始する(S609)。また、LAN機器14は、シリアルケーブル301で接続されるディスプレイユニット31へセンサ24の航法データを与える(S613)。LAN機器13は、第二通信網201で接続されるディスプレイユニット21へセンサ24の航法データを与える(S614)。ディスプレイユニット12,21,31は、センサ24の航法データを表示する。
(もっと読む)
自動追尾スキャニングソナー
【課題】
自動追尾スキャニングソナーにおいて、魚群等の標的のサイズ、速度が刻々変化し、或いは、予測値と観測映像との間に誤差が発生している状況でも、最適な抽出領域(位置、サイズ)を決定できるスキャニングソナーを提供する。
【解決手段】
魚群等の標的の、見掛け上のサイズの変化、加速度の変化、予測値と実測値の誤差(差分)等を、過去の複数フレーム分のデータも加味して比較・分析することで、標的の最適な抽出領域(位置、サイズ)を決定する。
(もっと読む)
GPS内蔵高機能ブイ
【目的】
GPSから得られるブイの位置情報を有効利用し、海上における情報ネットワークを提供する。
【構成】
暗礁の場所や航路などを知らせる標識であり、また、海面水温や海上風速の検証に用いられる観測計であるブイにおいて、複数の所定の場所に配置されたフロート内に、無線中継装置とGPSと音波通信機と水中音波アンテナを備えることにより海中の情報を位置情報付きで提供する装置であって、該音波通信機が発する信号の反射波を該水中音波アンテナで受信することにより水中における物体や海底の情報を得ると共に、該無線中継装置により前記情報を地上局に伝送できることを特徴とするGPS内蔵高機能ブイ。
(もっと読む)
釣り情報表示装置
【課題】釣り情報表示装置において、仕掛けの水深をより正確に表示できるようにする。
【解決手段】魚探モニタは、モニタ表示部と情報表示制御部とを有している。情報表示制御部は、スプールから繰り出された釣り糸に係止された仕掛けの第1水深データを獲得可能な電動リールから出力される第1水深データを受け付けるとともに、魚群探知機から第2水深データ受け付ける。そして、決定ボタンが操作されると、第1水深データ及び第2水深データをもとにして、第1水深データ補正して補正第1水深データを得、第1水深データを水深データ表示手段に図形表示させるとともに、水深データ補正手段により第1水深データが補正されると、補正第1水深データを表示部に図形表示させる。また、魚群タ探知機から得られた第2水深データをグラフィック表示する。
(もっと読む)
水中探知装置
【課題】近接した複数の魚群を同一魚群として自動追尾することが可能な水中探知装置を提供する。
【解決手段】超音波の送受信による水中探知で得たエコーに基づいて魚群を検出し、検出した魚群のエコー画像を画面に表示する水中探知装置において、エコーのデータを閾値に基づいて2値化する2値化手段と、この2値化手段で2値化されたエコーデータに対してラベリング処理を行うラベリング手段とを備える。ラベリング処理の結果に基づいて、近接した複数の魚群を同一魚群として自動追尾する。
(もっと読む)
自動追尾スキャニングソナー
【課題】 標的を見失うことなく迅速に追尾可能な自動追尾スキャニングソナーを提供する。
【解決手段】 直前に探査した魚群Tの重心G1を中心としてエコーを解析するエリアを探査エリアWとし、この探査エリアWを順次拡大して魚群Tの位置を探査し、探査した魚群Tの重心G2を次の探査における探査エリアWの中心とする。さらに、探査エリアWを所定の大きさまで拡大しても魚群Tの位置を探査できない場合には、送受信ビームTB、RBの俯角θを順次変えて魚群Tの位置を探査する。
(もっと読む)
水中探知装置
【課題】正確に魚体長検出や魚種判別を行うことができる水中探知装置を提供することを目的とする。
【解決手段】超音波信号を送信する送信部3と、送信信号に対する物標からの反射波を受信する受信部4と、前記受信部で受信した受信信号から、単体魚からの反射信号を抽出する抽出部6と、前記単体魚からの反射信号のうち、所定の信号レベル以上で連続する反射信号の波形情報を取得し、該波形情報に基づいて、魚に関する情報を生成する情報生成部7とを備える。これにより、単体魚からの反射信号の時間的変化、つまり反射信号の波形の情報から、魚体長情報や魚種情報などの魚に関する情報を生成することができる。
(もっと読む)
水中探査装置
【課題】超音波探査機能と水中可聴音聴取機能とを備える簡易・安価な超音波探査装置を提供する。
【解決手段】水中探査装置は、水中に超音波信号を送波する超音波送波器14を備えた超音波送信部11,12,13,30と、水中の物体からの反射信号を受波する単一または複数の送受共用もしくは専用の超音波受波器14を有する超音波受信部30,13,15,16と、この超音波受信部が受信した反射超音波信号を処理して水中の反射物体として表示する表示部17,18,19とを含む超音波探査部とに加えて、超音波受波器14が受波した可聴音信号を分析する音響分析手段と、この分析結果をする反射物体の表示位置に対応する異なる位置に表示する表示手段と、水中可聴音信号を魚群の検出時に音響出力する水中可聴音聴取部31a,32,33a,34,35とを備えている。
(もっと読む)
スキャニングソナー
【課題】残響を抑圧するにあたって、周波数特性の違いを利用せず、演算時間を短縮して高速処理を可能とする。
【解決手段】各レンジごとに、受信ビームで受信された信号のレベルを検出し、検出された信号レベルに対して、一定以上突出したレベルを除いた範囲で、当該信号レベルの平均値Bを算出する。この平均値Bに基づいて、レベル変換される信号レベルの上限値となる変換最大レベルL2を決定し、検出された信号レベルIのうち、変換最大レベルL2以下の信号レベルをこれよりも低い信号レベルに変換する。
(もっと読む)
魚群探知機および魚群探知機の測定情報表示方法
【課題】過去の反響波情報と自船位置との対応付けが容易な魚群探知機を提供する。
【解決手段】測定情報指定手段26によって指定された時点の反響波情報が、反響波表示用ウインドウ28内の予め規定された基準ライン上に位置するように制御するとともに、測定情報指定手段26によって指定された前記反響波情報を測定した自船位置が、航跡表示用ウインドウ27に表示する航跡画像29において、航跡表示用ウインドウ27内の予め規定された原点に位置するように制御するようにした。
(もっと読む)
自動追尾スキャニングソナー
【目的】
探査範囲を魚群の上下移動に合わせて俯角を調整することが可能とし、魚群の追尾性能が向上させる。
【構成】
自動追尾スキャニングソナーにおいて、傘状送波ビームとペンシル上受波ビームを用いて水平スキャンを実行する送受波部と、断面画像構成部と、魚群像抽出部と、魚群像位置情報算出部と、俯角−蓄積反応強度記憶部と、水平断面上動き予測部と、探査範囲制御部と、からなることを特徴とする自動追尾スキャニングソナーであり、魚群が垂直移動をした場合にも、魚群を見失わない。
(もっと読む)
水中探知装置
【課題】ユーザーの経験に因ることなく底質及び魚種ひいては水中の様子を直感的に判断することのできる水中探知装置を提供することを目的とする。つまり探知結果を写実的に表した水中探知装置を提供することを目的とする。
【解決手段】前記課題を解決するために本発明における超音波の送受信により水中を探知する水中探知装置は、超音波信号を水中に送信する送信手段と、前記送信された超音波信号のエコー信号を受信する受信手段と、前記エコー信号に基づいて水底を検出する水底検出手段と、前記エコー信号に基づいて前記水底の底質が予め定めた複数種類の底質のうち何れの底質に属するかの確率分布を算出する底質判別手段と、前記確率分布に基づいて、底質を表すテクスチャーを前記水底より下方に表示する底質表示手段とを備えることを特徴とする。
(もっと読む)
超音波探査装置
【目的】
構成が簡易・安価であるという利点を保ったまま、船の動揺による送受信素子の傾斜による影響を排除し、確度と精度を向上させた超音波探査装置を提供する。
【解決手段】
本発明の超音波探査装置は、超音波信号を送信する送信部と、この送信された超音波信号の物体による反射波を受信し受信信号を出力する複数の受信素子を備えた受信部と、複数の受信素子の配置と各受信素子から出力される受信信号の位相差とから物体の方位を検出する方位検出部と、受信信号の出現時点および振幅から物体の距離および反射強度を検出する距離・反射強度検出部と、前記検出された方位、距離および反射強度を表示用データとして画面表示する表示処理部とを備えた超音波探査装置であって、受信部の傾斜を検出する傾斜検出部を備えた構成となっている。
(もっと読む)
ブイおよび魚群探知システム
【課題】魚群探知機を搭載した漁船や模型ボートで魚群を探し出すという手間がなくなり、効率的に漁を行うことができ、しかも漁船の出港前、出港中に関わらず最新の魚群情報を得ることができ、データベースにも最新の魚群情報を反映させることができるブイおよび魚群探知システムを提供すること。
【解決手段】ブイに魚群探知機とGPS受信機と無線機とを搭載する。ブイから魚群情報および位置情報を無線で情報収集センタに送信し、データベースとして保存する。船舶は、無線でデータベースにアクセスし、最新の魚群情報および位置情報を無線で取得し表示端末に表示させる。
(もっと読む)
クジラ目生物探知機
【課題】クジラやイルカなどのクジラ目生物の存在の有無および方角を探知し、その生物の種類を特定して種類名称を表示する、クジラ目生物探知機を提供する。
【解決手段】クジラ目生物の発する超音波の波形情報を生物の種類毎のデータベースとして持ち、超音波マイクを設け、受信した超音波の波形情報を前記データベースと照合し、その照合での合致の有無によりクジラ目生物の存在の有無を探知する。超音波マイクとして指向性があるものを採用し、超音波の発信源であるクジラ目生物の存在する方角を特定する。前記データベースにクジラ目生物の種類名称の項目を持たせ、照合結果として、合致した生物の種類名称をも出力する。
(もっと読む)
超音波送受信装置およびスキャニングソナー
【課題】方位方向の弁別能を高め、擬像の発生を抑制し、方位方向の探知精度の低下および感度低下を防止する。
【解決手段】送信信号発生回路120は、トランスデューサ101の基準方位を基準とする方位に応じて、送信周波数差が例えばリニアに異なる第1・第2の2つのバースト波を生成し、増幅回路103は、その信号でトランスデューサ101の所定の振動子を駆動する。プリアンプ105は第1・第2のバースト波によって生じる受信信号を増幅し、プリフィルタ106は所定帯域のみ通過させ、A/Dコンバータ107はディジタルデータ列に変換し、ビームフォーマ108が所定方位に受信ビームを形成する。相関フィルタ121は、第1・第2のバースト波による合成受信信号から生成される合成波形に対して、方位に応じた送信周波数差で決まるフィルタリング処理を施す。
(もっと読む)
61 - 80 / 117
[ Back to top ]