
Fターム[5J083AE04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180) | 魚 (117)
Fターム[5J083AE04]に分類される特許
101 - 117 / 117
釣り用リール及び釣り情報表示システム
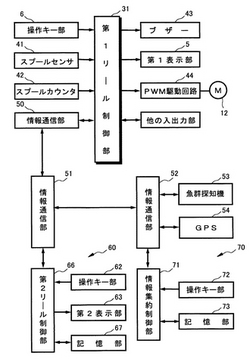
【課題】釣り用リールの構成の簡素化を実現する。
【解決手段】この釣り用リールは、釣りに関する第2情報を表示する第2表示部63と各種のデータを保持する記憶部67とを有する釣り情報表示装置60に有線又は無線により接続可能であり、釣り情報表示装置60に有線又は無線により接続されるリール本体1と、リール本体1に装着されリールに関する第1情報を表示する第1表示部5と、釣り情報表示装置60の記憶部67に保持されたデータを元にリール動作の制御を行う第1リール制御部31と、を備えている。
(もっと読む)
超音波送受波器および水中探知装置

【課題】円筒部と半球部とからなる送受波器において、振動子の配列を工夫することにより、垂直方向のグレーティングローブを抑制するとともに、指向性偏差を最小限とする。
【解決手段】円筒部1Aでは、1つの振動子に隣接する6個の振動子が正6角形8の各頂点に位置するように振動子10aを配置し、また、正6角形8の対向する一組の辺9が鉛直方向を向くように配置する。半球部1Bでは、半球部1Bの球面に内接する正12面体を構成する正5角形を球面上に投影して得られる図形を球面5角形5としたとき、球面5角形5の構成要素をなす球面3角形6の頂点と、球面3角形6の各辺を等分割した点と、これらの等分割点を結ぶ円弧により形成される小さな球面3角形の重心とにそれぞれ振動子10bを配置する。
(もっと読む)
底質表示魚群探知機
【課題】 水底の第1反射波〜第n反射波に応じた表示ブロックB1〜Bnを表示するようにしているために、時間の経過とともに水底の低質がどのように変化しているかを知ることができないという点である。
【解決手段】 超音波振動子12は発振部13の出力側と受信部14の入力側に接続され、受信部14の出力はA/D変換部15に入力され、A/D変換部15の出力は記憶部16に接続され、記憶部16の出力は画像信号変換部17に入力され、記憶部16の出力は水底からの第2反射波が通過する時間だけ遅らせて開くように設定されたゲート部18に入力され、ゲート部18の出力は比較部19に入力され、比較部19でレベル記憶部20に予め設定されたレベル強度と比較され、レベル記憶部20からのレベル強度と一致したレベル強度信号を画像信号変換部17に入力され、画像信号に変換されて、表示部21で表示するように構成されている。
(もっと読む)
音響反射器
航法装置のための、ならびにロケーションおよびリロケーション用途のための反射ターゲットとして使用するのに適した音響反射器10。音響反射器は固体コア16を取り囲むように配置されたシェル12を含む。シェルは、シェルに入射する音波18をコア16の中に伝達するように構成される。コア内部で音波は、集束されてからシェル20の対向側面から反射されて反射音波になる。シェルに入射する音波の一部は、シェル壁の中に結合されシェルの外周26の内部および周りに案内されてから再放射され、反射音波と構築的に結合して強化された反射音波になる。  (もっと読む)
(もっと読む)
水中探知装置
【課題】水中の様子を3次元的に容易かつ正確に認識できる水中探知装置を提供する。
【解決手段】水平モードおよび垂直モードでのスキャンにより得られたエコーのデータから3次元のエコー表示データを生成し、このエコー表示データに基づいて、表示画面17a上に3次元の魚群映像34を立体的に表示する。また、魚群映像34に加えて、水平モードでの傘形ビームのスキャン領域32、垂直モードでの扇形ビームのスキャン領域33、海底地形映像35、等深度線36などの3次元映像を立体的に表示する。
(もっと読む)
釣り用浮き
【課題】 従来の釣り用浮きでは、魚がかかった時にだけ検知するようにしているため、釣り用浮きを投げ入れた時に、釣り用浮きの下に魚群がいるかどうか分からないという問題がある。
【解決手段】 円筒形本体1の下端近傍に傘状安定板2を形成し、円筒形本体1の上端に釣り糸3を結ぶ連結具4を固着し、円筒形本体の下端に重り5及び釣り針6を結ぶ釣り糸7を結ぶ連結具8が固着され、又、円筒形本体1の内部下端に圧電体振動子9が装着され、この圧電体振動子9の上に発振器10が装着され、発振器10の上に電池等の電源11が装着され、電源11の上に増幅器を装着した受信機12が装着され、受信機12で受信された反射波信号によって、円筒形本体1の内部上端に装着された発光体13を発光させる。
(もっと読む)
スキャニングソナー
【課題】広範囲を探知することのできるスキャニングソナーを提供する。
【解決手段】球形の送受波器1の振動子から超音波を送信することにより、送受波器1の周囲に傘状の送信ビームTBが形成される。また、スキャニングソナーの受信ビーム形成部で送受波器1の各振動子の受信信号の位相や受信開口の大きさなどを制御することによって、受信ビームRBが形成される。この受信ビームRBは、その俯角が送信ビームTBの俯角αと等しくなるように形成される。また、受信ビームRBの上下方向の広がり角θVは、探知距離Dが長くなるに従って小さくなるように制御される。
(もっと読む)
魚群情報、魚群の体積及び単体魚の後方散乱強度を算出可能な水中探知装置、並びにそれらの方法
【課題】 魚群の魚量情報、魚群の概ねの体積または単体魚の後方散乱強度について、漁業者の経験に依ることなく定量的に算出可能な水中探知装置を提供する。
【解決手段】 船体7から水中の所定方向に超音波ビームを送信し、魚群FS内からの反射エコーを受信ビームにより受信するトランスデューサ2と、受信ビームを処理する信号処理部とを備える。トランスデューサ2は、鉛直平面H2に略沿う方向と、xy平面及び鉛直平面H2のいずれにも交差し且つ船体7の周りに形成される傘型面H1に略沿う方向とに受信ビームを形成可能である。信号処理部5が、受信ビームから得られるデータに基づいて擬似的な三次元データを構築し、魚群FS内の魚量情報を算出する。また、受信ビームから得られるデータを二値化処理し、これに基づいて擬似的な三次元データを構築して魚群FSの概ねの体積を算出する。
(もっと読む)
魚群の魚量情報を算出可能な水中探知装置及びその方法
【課題】 漁業者の経験に依らず且つばらつきが少ない魚群の魚量情報を定量的に算出可能な水中探知装置を提供する。
【解決手段】 船体7から水中の所定の方向に超音波信号を送信する送信部3と、前記送信された超音波信号に起因する魚群FS内からの反射エコーを受信ビームにより受信する受信部4と、前記受信ビームの信号を処理する信号処理部5とを備える。信号処理部5が、受信ビームにより得られる入力換算音響強度PM2を所定の三次元方向に積分することによって、前記魚群FSの魚量情報を算出する。
(もっと読む)
水中探知システム
【課題】複数の水中探知装置を備えた水中探知システムにおいて、複数の水中探知装置から超音波が送信されることによる干渉の問題を軽減すると共に、ローリング等の影響を受けないようにする。
【解決手段】波形データ生成部16は、所定の探知方向に送信ビームが形成されるように、定期的に動揺検出部40から出力されるローリング角等を用いて各チャンネルの送信信号の元になる波形データを生成する。この波形データは所定の条件に従って第1または第2メモリ15a,15bに書き込まれる。スキャニングソナー50の制御部3が魚群探知機100から超音波の送信指令を受信すると、メモリ制御回路14は、第1および第2メモリ15a,15bのうちで最新の波形データを記憶するメモリ15から波形データを読み出す。読み出された波形データは送信信号生成回路13で正弦波の送信信号となり、送信信号が振動子2を駆動することで超音波の送信が開始される。
(もっと読む)
海中センサ集合システム、基地局、および最適航法装置
【課題】魚群の存在を検知し、今現在の魚群の位置に関する情報を取得することが可能な海中センサ集合システム、海中センサ集合システムから魚群に関する情報を取得する基地局、および当該基地局から取得した魚群に関する情報に基づいて漁船を誘導する最適航法装置を提供する。
【解決手段】海中センサ装置3は超音波レーダを備え、ある頻度で超音波パルスを送信する第1の動作状態と、当該頻度よりも高い頻度で超音波パルスを送信する第2の動作状態のいずれかで動作する。海中センサ装置3は第1の動作状態で魚群を検知して報知信号を基地局4に送信する。基地局4は、報知信号に基づいて第2の動作状態とすべき海中センサ装置3を指定し、動作指令信号を海中センサ集合システム2に送信する。動作指令信号を受信し、自らが指定されたと認識した海中センサ装置3は、第2の動作状態での動作を開始する。
(もっと読む)
水中探知装置および水中探知方法
【課題】他の船舶の水中探知装置から送信される超音波による悪影響を低減できるようにした水中探知装置および水中探知方法を提供する。
【解決手段】円筒形の送受波器1は12の領域A1〜A12に分けられ、その表面には多数の不図示の振動子が周方向に等間隔で配置されている。ある探知サイクルでは、(a)に示すように各領域A1〜A12の振動子がそれぞれ方位別周波数f1〜f12の信号で駆動され、各方位D1〜D12に周波数f1〜f12の超音波が送信される。超音波の受信期間では、方位D1〜D12別に周波数選択して、各方位D1〜D12に指向性主軸を有する受信ビームB1〜B12を繰り返し形成し、各受信ビームB1〜B12を解析することにより、魚群などを探知する。次の探知サイクルでは、(b)に示すように、(a)とは異なる態様で方位別周波数f1〜f12を領域A1〜A12に割り当てる。
(もっと読む)
音波ビーム形成装置、水中ソナー、及び音波ビームの制御方法
【課題】 低コストの水中ソナーを実現する。
【解決手段】 発振器11が出力する発振信号が送波器12〜15に与えられ、発振信号の周波数と等しい周波数の音波を各送波器12〜15がそれぞれ発生する。ダクト13b〜15bは、移相器として機能し、各放射口12a〜15aから放射される音波の位相を順次異ならせる。各放射口12a〜15aから放射される音波の合成波が、音波ビームとなって指向方向に放射される。ここで、発振器11の出力する発振信号の周波数を変化させるだけで、音波ビームの指向方向が変化するので、例えば1個の受波器20があれば、音波ビームを反射する対象物の方向が検出可能である。
(もっと読む)
船舶搭載用ソナー画像システム
船舶のためのソナー画像システムが開示される。ソナー画像システムは、船舶に連結された送受波器を備え、送受波器は、少なくとも1つのサイドスキャニング素子と、少なくとも1つのボトムスキャニング素子と、を備える。また、ソナー画像システムは、送受波器に連結され、ソナー画像を表示するよう構成された電子制御ヘッドユニットを備える。下方音響素子は円形であってもよく、サイドスキャン音響素子は矩形であってもよい。船舶のモータにおけるスパークプラグまたは他の動作によって発生するノイズを除去するためのソフトウェアフィルタが設けられても良い。  (もっと読む)
(もっと読む)
河川魚類計測方法およびその装置
【課題】より一層正確に遡上魚及び降下魚の有無、種類、数量を計測する。
【解決手段】河川にある魚道3の隔壁9を設けた複数の潜孔部11から魚を通過せしめ、水中に設けた超音波送受波器15により前記各潜孔部11を通過する魚類13に対して斜め方向に向けて水中からほぼ水平に指向特性を制御した超音波を送信すると共に魚類13に反射した反射波を受信し、この反射波により魚類13の有無と数量とを時系列に自動的に計測する。超音波が魚類13に対して斜め方向に向けて送受信されることで、ターゲットを大きく捉えることができ、反射波を大きくできる。さらに、各潜孔部11を通過する魚類13を水中から魚類撮像手段31で撮影する。記録した映像は、後日、人手により各超音波送受波器15によるデータと併せて通過時間、移動方向、魚数、魚種を確認、集計できる。
(もっと読む)
魚群探知機および魚群探知機用トランスデューサ
水中に超音波を出射してその反射波を捉えることにより魚群を探知する魚群探知機(10)を構成するにあたり、超音波の出射およびその反射波の受信を行う複数の圧電素子(21),(22)を含むトランスデューサ(20)と、各圧電素子(21),(22)により受信した反射波に基づき魚影を識別する処理を行う魚影識別処理手段(52)と、識別した魚影を表示装置(47)の画面上に表示する処理を行う魚影表示処理手段(53)とを設け、複数の圧電素子(21),(22)を、それぞれ異なる方向に指向性の中心線を向けて配置するとともに、少なくとも一つの鉛直面について、同一鉛直面内で水面に対して平行または略平行な方向を含む複数の方向に指向性の中心線を向け、かつ、探知範囲に隙間が形成されない状態で配置した。 (もっと読む)
魚群探知機用アタッチメント
【課題】 小型ボート等に魚群探知機を設置する際、船内のスペースを広く活用出来、また、魚群探知に適した箇所に適切に配置出来るようにする。
【解決手段】 インフレータブルボートBのフロート部Bfに設けられる取付座gにアタッチメント1の本体2を固定し、この本体2から水中に向けて延出するアーム3の先端にセンサ4を取付けるとともに、本体2の上部にモニター部7を取り付け、センサ4で検知した信号をモニター部7の画面に表示する。また、アーム3をアーム支持軸13の軸周りに回動自在にし、更にアーム3の中間部を折り畳み可能にする。
(もっと読む)
101 - 117 / 117
[ Back to top ]