
Fターム[5J083AE04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180) | 魚 (117)
Fターム[5J083AE04]に分類される特許
1 - 20 / 117
魚群探知装置
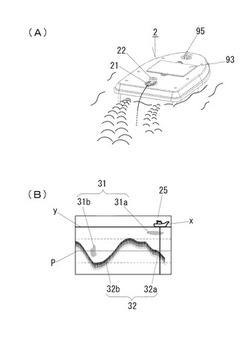
【課題】遠隔操作可能なラジコンボートを用いて魚群を探知する構成で、該魚群のポイントを容易に特定できる魚群探知装置を提案する。
【解決手段】送受波器を備えたラジコンボート2を右旋回すると、画像表示器の反響波表示領域25の右側から左側に向かって過去反響波情報31b,32bを時系列的に表示し、左旋回すると、該反響波表示領域25の左側から右側に向かって過去反響波情報を時系列的に表示するように、左右方向の時間軸線P方向を自動的に反転表示するようにしたことによって、旋回するラジコンボート2の進行方向と反響波表示領域25の時間軸線Pの進行方向とが同じ向きとなるため、操縦者がラジコンボート2から目を離した場合にも、ラジコンボート2の航跡をイメージし易く、魚群を探知したポイントを特定し易い。
(もっと読む)
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法

【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法
【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
アラーム発生装置、超音波探知装置、アラーム発生方法、超音波探知方法、アラーム発生プログラム、超音波探知プログラム
【課題】ユーザの所望とする魚種が検出されたときにのみ、正確且つ適切に、ユーザへ通知を行う。
【解決手段】超音波パルス信号のエコー信号から探知データを生成する(S101)。探知データに基づいて魚群(単体魚)エコーの検出、深度、底質等の魚種によって特徴が異なる判定用情報を検出する(S102)。魚種に応じて予め設定された複数のアラーム発生条件毎に、判定用情報を検証する(S103)。複数のアラーム発生条件のうち一つでも判定用情報によって満たされていなければ、アラームは発生しない(S104:No)。一方、全てのアラーム発生条件が判定用情報によって満たされていれば(S104:Yes)、アラームを発生して放音する(S105)。
(もっと読む)
水中探知装置、水中探知方法、および水中探知プログラム
【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
(もっと読む)
セクタースキャン方式のソナー
【課題】 解決しようとする問題点は、振動子を戻す数秒間は超音波の送受信はできないため、表示画像を更新できず、画像の表示がスムーズでなく、見にくいという点である。
【解決手段】 メイン制御部12の駆動パルス送信部12aから超音波振動子5をセクタースキャン及び戻り駆動するための信号をモータ駆動部6に送信し、メイン制御部12の戻り時間検出部12bで戻り時間を検出し、戻り時間割り当て部12cで戻り時間をセクタースキャンのスキャン毎に割り当て、駆動パルス送信部12aからの出力で、発信パルス送信部12dから発信器8に発信パルスを送信し、戻り時間割り当て部12cは割り当て時間調整部13に割り当て時間を送信し、割り当て時間調整部13はメモリ11からの読み出されたデジタル信号をメイン制御部12の戻り時間割り当て部12cから割り当てられた時間で調整され、画像信号変換部14は割り当て時間調整部13から出力されたデジタル信号を画像信号に変換し、表示部15で表示する。
(もっと読む)
ターゲット長計測装置、ターゲット長計測方法、およびターゲット長計測プログラム
【課題】目的物標の種類を判別することにより、この目的物標の体長の算出精度を向上させたターゲット長計測装置を提供する。
【解決手段】送信部20が、送受波器10に送信させた超音波信号のエコー信号を受信部30で受信する。魚種判別情報算出部40が、この受信したエコー信号に基づき、目的物標である魚群、または魚体を探知するとともに、その魚群、または魚体の種類を判別する。また、TS計測部51が、受信したエコー信号に基づき、この目的物標のターゲットストレングスを計測する。また、魚体長算出部50が、魚種判別情報算出部40が判別した魚種について、TS標準化値記憶部53に記憶しているターゲットストレングスの標準化値、およびTS計測部51が計測したターゲットストレングスを用いて、魚体長を算出する。
(もっと読む)
水中探知装置、水中探知方法及びプログラム
【課題】所定レベル以上のエコー信号を取得できない場合でも、信頼性のある水深を取得することができる水中探知装置、水中探知方法及びプログラムを提供する。
【解決手段】送信された信号が水中で反射してなるエコー信号に基づいて、水深を検出する水中探知装置であって、自装置の位置を取得する。位置の水深を示す水深データを取得する。取得した位置及び取得した水深データに基づいて、検出すべき水深を推定する。エコー信号に基づく画像と、推定した水深とを表示する。
(もっと読む)
超音波送受信装置、定量検出方法、および魚量検出方法
【課題】短時間で正確に魚量を計測できる超音波送受信装置を実現する。
【解決手段】魚群探知機に相当する第1超音波送受信部21は、船舶の鉛直下方向へ第1超音波信号を送信し、魚群に反射して得られるエコー信号を出力する。ソナー装置に相当する第2超音波送受信部22は、船舶の下方向の所定範囲に第2超音波信号を送信し、魚群に反射して得られるエコー信号をビーム形成したビームエコー信号を出力する。演算部30は、エコー信号から得られる魚群のエコー強度に関するデータと、エコービーム信号から得られる魚群の大きさに関するデータから、魚量を算出する。
(もっと読む)
探知装置およびプログラム
【課題】必要以上に干渉除去を行わず、従来よりも高精度に干渉の検出を行うことができる探知装置を提供する。
【解決手段】送信信号に対するエコーの強度に応じた受信信号を出力する送受信部と、前記受信信号から、干渉信号を検出する干渉検出部と、を備え、前記干渉検出部は、干渉信号であると判断した受信信号の数に応じて、第1の干渉検出処理から、前記第1の干渉検出処理よりも干渉の検出感度が高い第2の干渉検出処理に切り替える、または第2の干渉検出処理から第1の干渉検出処理に切り替える切替動作を実行する。
(もっと読む)
水中探知装置及び水中探知システム
【課題】他船の航跡からの反射信号に関わらず、魚群信号を識別容易に表示する。
【解決手段】スキャニングソナー10は、レーダ装置10から他船の位置の情報を継続して取得する。表示画像処理部134は、この他船の位置情報に所定の加工、すなわち輝点を表す画像信号に変換する処理を施す。変換された輝点画像は、航跡情報に沿って線状となり、探知画像に重畳されて表示部に導かれる。
(もっと読む)
物標探知装置及び物標探知方法
【課題】単体魚等の物標を高精度で検出する。
【解決手段】単体魚の検出を行う水中探知装置10は、受信信号に対し、所定期間毎にその期間内の最大値を抽出するマックスピークホールド部1611と、受信信号に対し、所定期間毎にその期間内の最小値を抽出するミニピークホールド部1612と、互いに異なるピークホールド位置で抽出された最小値と最大値との間の勾配を用いて単体魚を示す信号の立ち上がり及びその立ち下がりを判定する単体魚一次検出処理部162とを備えている。
(もっと読む)
探知装置、探知方法、および探知プログラム
【課題】コストや回路規模の増大を抑えながら受信信号を飽和させない探知装置を提供する。
【解決手段】受信信号監視部142は、メモリ17から海底深度に応じた受信信号を読み出し、飽和状態を監視する。例えば、海底深度よりも数サンプル程度浅い深度に対応する受信信号から順に所定サンプル数の受信信号を読み出し、これらのサンプルの最大値が飽和レベルに達したか、あるいは飽和レベルに近づく場合飽和状態であると判定する。送信条件設定部145は、受信信号監視部142で受信信号が飽和状態であると判定された場合、送信信号の条件を変更する。すなわち、送信回路13に対し、次のpingから送信信号の出力を低減する設定を行い、受信信号の飽和を防止する。
(もっと読む)
探知装置、水中探知装置、探知方法及びプログラム
【課題】余分な機器を設けることなく、反射波に含まれる雑音を低減させて、精度のよい探知結果を得る。
【解決手段】水中探知装置1において、受信信号Rf(t)から、エコー及びノイズに係る受信信号Rf(t1)と、ノイズのみに係る受信信号Rf(t2)とに分離し、それぞれの受信信号Rf(t1)及びRf(t2)をフーリエ変換する。受信信号Rf(t1)及びRf(t2)のパワースペクトルを算出した後、受信信号Rf(t1)からRf(t2)のパワースペクトルを減算し、減算結果に対してフーリエ逆変換を行う。水中探知装置1は、その結果に基づいて、水中の探知を行う。
(もっと読む)
水中探知装置
【課題】ノイズのレベルに影響されることなく、対象物のエコーを確実に視認できる探知画像を生成する。
【解決手段】TVG処理部41は、受信信号EB(t)をTVG処理し、受信信号EBc(t)を生成する。平均レベル算出部42は、複数の受信信号EBc(t)における同一距離位置の方位方向に沿った各信号レベルの平均レベルAV(t)を算出する。閾値設定部43は、距離に応じた閾値Th(t)を設定する。ゲイン設定部44は、平均レベルAv(t)が閾値Th(t)以上であればゲインG(t)=Th(t)/Av(t)を設定し、平均レベルAv(t)が閾値Th(t)未満であればゲインG(t)=Coを設定する。乗算器45は、受信信号EBc(t)にゲインG(t)を乗算し、探知画像用信号DD(t)を生成する。探知画像形成部46は、探知画像用信号DD(t)の信号レベルに応じた階調表示の探知画像データを生成する。
(もっと読む)
魚群探知装置
【課題】 従来の魚群探知機の表示では、縦方向スケールと横方向スケールの比率が一定ではなく、感覚的に表示画面が見にくいという点である。
【解決手段】 第1のメモリ10から読み出された反射波信号によって深度レンジデータ出力部17で深度レンジデータを作成し、第1のメモリ10から読み出された船速データ付き反射波信号は横尺計算部18に入力され、深度に応じた横尺が計算され、この計算値に応じて横尺の伸縮度が横尺伸縮部19で、表示装置16で表示される画像の横幅の伸縮度が計算され、第1のメモリ10から読み出された反射波信号は計算された伸縮度に応じて伸縮され、この伸縮された反射波信号は第2のメモリ20に入力され、第2のメモリ20から読み出された伸縮された反射波信号は伸縮画像作成部21に入力されて画像信号に変換され、表示装置16で図2のBで示された画面の水底Cは、図2の深度に応じて横尺度が一致され、図3の水底Dで示すように、深度と一致した横尺度に伸縮されるので、実際の地形に近い表示になる。
(もっと読む)
水中測位システム及び水中測位方法
【課題】水中に存在する複数の測位対象物を簡易な構成によって確実に識別する。
【解決手段】水中に存在する複数の測位対象物2A〜2Nに設けられた複数の超音波発信装置5から、それぞれ、所定のビット数の論理符号配列を有する符号列C1〜C24の識別情報を含む擬似雑音信号S3によって生成された超音波識別情報SA〜SNを送波して、中央測位装置6において受波した超音波識別信号SA〜SNと相互相関基準信号S13とを相互相関演算することによって一致検出信号S14R、S14Lを得るようにしたことにより、水中の複数の測位対象物2A〜2Nを、簡易な構成によって、確実に識別できる水中測位システム1を実現できる。
(もっと読む)
超音波探知システム
【課題】従来のクラゲ探知システムでは1フレームの画像を取得するため非常に時間がかかるので、短時間で観測できる超音波探知システムを提供する。
【解決手段】超音波振動子6aで受信した反射波データをメモリ6dから読み出し、制御回路9の複数個の信号を1つの信号とするグループ化機能でグループ化し、グループ化された信号を上限値ゲート機能に入力して強い反射波をカットし、下限値ゲート機能に入力して弱い反射波をカットし、上限値及び下限値がカットされた出力データを第1の判別機能に入力し、出力データが規定値より多いかどうかが判断され、多ければクラゲと判断され警報信号が出力され、出力データが第2の判別機能に入力され、予め決められた時間以上存在するかどうかが判断され、存在する場合はクラゲと判断されて警報信号が出力され、第1、第2の判別機能の両方から警報信号が出力された場合にのみ、警報機に信号が出力される。
(もっと読む)
探知装置、スキャニングソナー、探知装置の制御方法及び探知装置用プログラム
【課題】装置設定のためのパラメータの管理を容易に行うことができる探知装置を提供する。
【解決手段】制御部70の抽出部71は、メモリ80の格納領域82から付与されるコード化情報に基づいて、メモリ80の格納領域81に格納されている装置設定用の全てのパラメータの中からエコー画像関連パラメータの値を抽出する。エンコード部73は、抽出部71で抽出されるエコー画像関連パラメータの値をエコー画像関連コードに変換する。イメージ信号生成部74がエンコード部73で変換して得られるエコー画像関連コードを表示部20に出力する。
(もっと読む)
水中探知装置及び水中探知方法
【課題】より確実、且つ、より精度良く魚の追尾を行うことができる水中探知装置および方法を実現する。
【解決手段】送受波器10で得られた魚Fiのエコー信号に基づく受信信号をマッチドフィルタ処理することで、パルス圧縮した検出信号を得る。対象の魚Fiの観測位置および加速度を算出する。算出した加速度に基づいて、誤差共分散を設定する。設定した誤差共分散と、算出した観測位置とを、拡張カルマンフィルタに代入し、魚Fiの推定位置を算出する。
(もっと読む)
1 - 20 / 117
[ Back to top ]