
Fターム[5J083BC11]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信波の形成 (274) | 指向性受波ビームの形成 (112)
Fターム[5J083BC11]の下位に属するFターム
Fターム[5J083BC11]に分類される特許
1 - 20 / 31
車両用物体認識装置
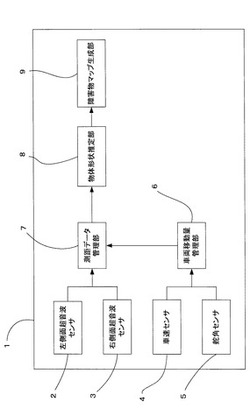
【課題】指向性の低い超音波センサを用いても、複雑な形状を有する物体の形状認識の精度を高めることができる車両用物体形状認識装置を提供する。
【解決手段】車両用物体形状認識装置1の物体形状推定部8により、物体の位置を示す距離点を超音波センサ2,3による検出距離で、照射範囲を横断した扇状の水平面の自車両の前方側臨界線近辺の対象線上の検出点および後方側臨界線近辺の対象線上の検出点のうち少なくともいずれかに設定し、自車両の移動に伴い繰り返し検出される検出距離のうち、超音波センサ2,3による自車両からの距離を検出する時刻およびその所定時間だけ前後の時刻における検出距離に基づき、各時刻の検出距離が自車両に近づくときは距離点を前方側の検出点に設定し、遠ざかるときは後方側の検出点に設定し、設定された距離点を繋ぎ合わせた形状を物体の形状と認識する。
(もっと読む)
音響画像生成システム、音響画像生成方法、および音響画像生成プログラム

【課題】検知した水中音波に基づき水中目標物の正確な位置を示す音響画像を生成するシステムを提供する。
【解決手段】水中の反射音を捕捉する音響センサ部5とこの反射音に基づき水中の物体の位置を示す音響画像を生成する画像データ生成部とを備え、反響音の水平方向の指向性を示すビームを合成する指向性合成部10と、反射音を捕捉した受信時刻と各反響音ビームの指向性に基づき船舶からの方位および距離として特定される各地点における反響音のレベルを導出する信号強度導出部11と、各位置情報に対応して導出した異なる反響音のレベルを積分して得た値に色情報を割り当てて表示する表示器14を備えた。
(もっと読む)
ソーナー装置及びその指向性合成方法
【課題】ソーナー装置において、受波器数の増加を抑え、垂直方向に対する感度を抑えつつ、音響信号の到来方向を知ることができるようにする。
【解決手段】オムニ指向特性の第1の受波器とダイポール指向特性の第2及び第3の受波器を用い、第2及び第3の受波器の最大感度軸を基準面内にあって相互に直交させる。第1乃至第3の受波器からの受波信号により、基準面内の所定の方向に対して最大感度となり、基準面内で所定の方向とは反対方向に対してヌル感度となり、基準面に垂直な方向に対して感度を有する指向性パターンの第1の信号を形成し、第2及び第3の受波器からの受波信号により、基準面内の各方向に対して一様な最大感度を有し、基準面に直交する方向に対してヌル感度となる指向性パターンで第2の信号を形成し、第1の信号と第2の信号との乗算結果またはその平方根をもって検出結果を表す信号とする。
(もっと読む)
死角車両検知システム、死角車両検知装置、死角車両検知方法およびそのプログラム
【課題】死角車両の音源の方向を正確に検知する。
【解決手段】自車両に配置され、車外音を集音する集音部102と、死角車両の回折音の音圧が死角車両の反射音の音圧より大きくなる音圧閾値を保持しており、集音部102で集音された車外音の音圧が音圧閾値より大きいか否かを判定する音圧閾値処理部103と、音圧閾値処理部103で車外音の音圧が音圧閾値より大きいと判定された場合に、集音部102で集音された車外音から、死角車両の音源の方向を検知する車両検知部105と、を備える。
(もっと読む)
水中目標物検出装置、該検出装置に用いられる目標物検出方法及び目標物検出プログラム
【課題】水中目標物検出装置での目標物のアスペクト及び方位、全長の推定精度を向上させる。
【解決手段】発振器31から送波器32に駆動信号adが与えられ、音波パルスapが送波される。受波器33により、音波パルスapが目標物20に到達したときの反射波の直接波df,de及びマルチパス波mf,meが合わせて受波されて受信信号wrが出力される。受波指向性合成部34により、受信信号wrが入力され、目標物20を指向するように受波ビームが指向性合成されて合成受信信号trが出力される。マルチパス補正部35により、合成受信信号trから、予め保持されているマルチパス波受信信号の時間幅を特定する情報を基にマルチパス波受信信号が除去され、直接波df,deに対応する直接波受信信号drが出力される。相関処理部36により、直接波受信信号drに基づいて、位相の相異なる直接波受信信号dr同士の相関値が算出されて目標物20が検出される。
(もっと読む)
車外音検出装置
【課題】 様々な周囲環境の下であっても、精度よく車両の外側の車外音を検出することができる車外音検出装置を提供する。
【解決手段】 音源方向検出ECU1は、マイクロホン2A〜2Gによって集音された車外の音に関する集音情報を取得する。音源方向検出ECU1は、取得した集音情報に基づいて、自車両の周囲の走行路情報を取得する。また、走行路情報を取得したら、走行路情報に基づいて、マイクロホン2A〜2Gの集音特性を調整する。
(もっと読む)
目標物探知装置及び目標物探知制御プログラム、目標物探知方法
【課題】目標物からの前方散乱波に対するタイムリバーサル波を応用することにより、目標物を探知する。
【解決手段】音波パルスを送波する音源と、伝搬環境内の物体からの前方散乱波を受波する領域に配置した変換器アレイと、障害物が伝搬環境に存在する状態で変換器アレイが受波した参照音場での参照信号と、障害物に加えて目標物が伝搬環境に存在する状態で変換器アレイが受波した混合音場での混合信号とをベクトル加算し、前方散乱波の信号のみを抽出する加算処理部と、前期抽出された前方散乱波の信号を受取り、参照音場の判定にパッシブ位相共役を適用することで、音源から変換器アレイまでの伝搬環境で位相共役性が成立しているかをチェックする位相共役判定部と、位相共役判定部で位相共役性が成立していると判定したことを条件として、前方散乱波に対してタイムリバーサル処理を施して、時間反転させた時間反転信号を生成する時間反転処理部とを含む。
(もっと読む)
距離測定装置
【課題】超音波を利用し2点間の距離計測をするセンサユニットにおいて、その周囲に反射物が存在しても、その影響を低減し安定な距離計測を可能にする。
【解決手段】センサユニットは水平面の全方位へ向けて超音波信号を発信する全方位超音波発信器100と、水平面の特定の方位より到来する超音波信号を受信する超音波受信器101〜106を備える。反射物検出モードでは、全方位超音波発信器100より超音波信号を発信させ、所定時間内に該超音波信号が超音波受信器101〜106の1つ以上で受信された場合に、それら超音波受信器による受信信号レベルに基づいて反射物の存在する方向を求め、該方向に対応した一部の超音波受信器の受信感度をそれ以外の超音波受信器の受信感度より下げる制御を行う。
(もっと読む)
物体の位置決定
本装置は、予め決められたゾーン内におけるユーザの手の目標部分の位置を決定する。本装置は、位置決定信号を送信する複数のトランスデューサを備える。トランスデューサは、予め決められたゾーン内における手の目標部分の任意の位置に関して、少なくとも2組の送信トランスデューサ及び受信トランスデューサのペアであって、ペアのうちの送信機からユーザの手の目標部分を経由してペアのうちの受信機に至る位置決定信号の合計伝搬時間が所定の点集合に往復する等価な合計伝搬時間より短くなるようなペアが存在するように配置される。上記点集合は、手の目標部分から所定の最小間隔よりも離れているが、本装置の最近接点から手の目標部分の位置までの距離と少なくとも同じ距離だけ本装置の最近接点から離れている、予め決められたゾーン内におけるすべての点を含む。一部の実施形態では、指及び手の混同なしに追跡するために使用可能なチャネルを選択する。  (もっと読む)
(もっと読む)
物体検出装置
【課題】 検出可能な物体が限定されず、かつ、物体の位置を検出することのできる物体検出装置を実現する。
【解決手段】 送信波を送信する素子Dと、反射波を受信する素子A,B,Cと、を有する超音波センサ21〜24がリヤバンパ7に配列されている。超音波センサ21が送信波を送信した場合に、超音波センサ22〜24に設けられた素子A,Bの指向性を広角に制御する。送信時間と受信時間との時間差によって障害物までの距離を求める。また、受信信号の素子A,Bにおける位相差によって障害物Pの水平方位を求め、素子A,Cにおける位相差によって垂直方位を求める。これにより、反射波の受信範囲が広がるので障害物の検出範囲を広げることができる。また、障害物の水平方向および垂直方向の位置を検出することができるため障害物の位置を高精度で検出することができる。
(もっと読む)
音源距離計測装置及びそれを用いた音響情報分離装置
【課題】周波数に依存せず高い精度で音源までの距離をリアルタイムに計測することが可能な音源距離計測装置を提供する。
【解決手段】音源距離計測装置は、少なくとも2つの音源方向計測部10と、音源距離演算部20とから主に構成される。各音源方向計測部10は、単一指向性の複数のマイクロホンを有し、各マイクロホンの感度最大方向を向く単位ベクトルの総和がゼロとなるように配置され、少なくとも音源からの音の方向を計測可能である。また、音源距離演算部20は、少なくとも2つの音源方向計測部により計測される音源からの音の方向を用いて三角測量の原理により音源までの距離を求めるものである。
(もっと読む)
障害物検出システム
【課題】障害物との距離が大きいときでも、小さいときでも、障害物を検出することができる障害物検出システムを提供すること。
【解決手段】本発明の障害物検出システムは、送信波を送信するとともに、前記送信波が障害物で反射してなる受信波を受信することで前記障害物を検出する障害物検出手段と、 前記障害物までの距離を算出する距離算出手段と、前記距離算出手段が算出した前記距離が、所定の基準距離以下であるときは、前記送信波の指向性を、前記距離が前記基準距離を超える場合よりも広くする指向性制御手段と、を備えることを特徴とする。
(もっと読む)
車両における障害物検出装置
【課題】車両に搭載する障害物検出装置の個数を減らすことができる技術を提供することを課題とする。
【解決手段】障害物検出装置30は、障害物を検出するためにビーム31を発射するビーム発射部32と、障害物によって反射された反射ビーム33を受信するビーム受信部34と、ビーム発射部32及びビーム受信部34を制御すると共にビーム受信部34で受信した情報に基づいて障害物の有無を判定する制御部35と、制御部35からの指示に基づいてビーム発射部32の発射軸36に直交する軸37廻りにビーム発射部32及びビーム受信部34を矢印(1)のように回転させる回転機構40を備えている。
【効果】ビーム発射部及びビーム受信部を回転させるようにしたので、広範囲を1個のビーム発射部及びビーム受信部でカバーすることができる。
(もっと読む)
超音波フェイズドアレイ送受波器
【課題】 超音波振動子の個数を減らし組立が簡単で安価な超音波フェイズドアレイ送受波器を提供する。
【解決手段】 長方形の超音波振動子2を用いて、水中音波の波長をλとする時、行方向をλ間隔で配列し、また列方向をλ/2間隔で配列し、ツインビームの受波信号をFFT処理回路8で分離検出する。
(もっと読む)
目標運動解析方法及び装置
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、音響センサ固有のバイアス誤差と音響センサを搭載する観測体の向きに基づくバイアス誤差とに対応するバイアス誤差成分に関する複数のインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
音源方向推定装置およびこれを用いた音源分離装置、ならびに音源方向推定方法およびこれを用いた音源分離方法
【課題】 反射音等の残響の影響を受けることなく、希望の音源の方向を特定する。
【解決手段】 左右のディジタル音響信号l(n)およびr(n)が、音源方向推定部26に入力される。音源方向推定部26は、これらのディジタル音響信号l(n)およびr(n)に対して両耳聴モデルに従う処理を施すことによって、音源の方向を推定する。併せて、各ディジタル音響信号l(n)およびr(n)の入力パワーPdが、パワー検出部24によって検出され、この入力パワーPdの立ち上がりが、立ち上がり検出部34によって検出される。そして、入力パワーPdの立ち上がりが検出されると、音源方向特定手段30が、その時点での音源方向推定部26による推定方向[φe,ψe]を、真の音源方向[φs,ψs]として特定する。つまり、各マイクロホン12および14に最初に到達した音の方向が、音源方向[φs,ψs]として特定される。
(もっと読む)
ロケーションシステム、ロケーション方法、ならびにそのプログラムおよび記録媒体
【課題】本願発明の発明者による従来のトポロジー推定システムと組み合わせて、オブジェクトの位置および方向を良好に推定することのできる、ロケーションシステム、ロケーション方法、ならびにそのプログラムおよび記録媒体を提供する。
【解決手段】空間内に存在するオブジェクト間で送受される音情報に基づいて当該空間内におけるオブジェクトの位置および方向を推定するロケーションシステムにおいて、各オブジェクトに、周囲に向けてオブジェクト固有音を発する発音装置11、および他のオブジェクトの発音装置から発せられたオブジェクト固有音を録音する録音装置12が装着されており、あるオブジェクトの発音装置11からのオブジェクト固有音が他のオブジェクトの録音装置12で録音されているかどうかを、時刻同期処理のなされた複数の録音装置データの中から見つけ出し、オブジェクト同士の1対1の距離関係、向き関係、およびIDとからなる相関関係を検出する、ことを特徴とするロケーションシステム。
(もっと読む)
超音波センサ
【課題】 指向性を制御することができる超音波センサを実現する。
【解決手段】 超音波検出素子10と、受信面32aで受信した超音波を、底面32dに取り付けられた超音波検出素子10に伝達する振動伝達部材32とを備えた超音波センサ1において、受信面32aが被検出体に対して凸形状に形成されているため、受信面32aが平面状に形成されている場合に比べて指向性を広くすることができる。また、振動伝達部材32は、受信面32aの形状により、超音波の検出範囲を制御することができ、超音波の検出範囲を被検出体の存在する空間側の所定の角度範囲に設定することが可能に構成されているため、被検出体を検出する必要がある方向から伝達される超音波のみを検出することができる。つまり、指向性を制御することができる超音波センサ1を実現することができる。
(もっと読む)
方位検出方法、物体検出装置、プログラム
【課題】装置構成を大型化することなく、虚像による方位の誤検出を防止可能な方位検出方法、物体検出装置、及びプログラムを提供する。
【解決手段】正方形の頂点に位置するように配置された受信素子Ei(i=1〜4)からの受信信号を直交復調した復調信号Riに基づき、第1方位候補群生成部25では、同一辺素子対EP12,EP13での位相差から複数の第1方位候補を生成し、第2方位候補群生成部26では、対角線素子対EP14,EP23での位相差から、複数の第2方位候補を生成する。そして、方位決定部27では、これら両方位候補群の間で、示す方位が一致する方位候補対に基づいて、目標物体が存在する水平及び垂直方位を決定する。
(もっと読む)
1 - 20 / 31
[ Back to top ]