
Fターム[5J083BE14]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 平均値算出 (51)
Fターム[5J083BE14]の下位に属するFターム
Fターム[5J083BE14]に分類される特許
1 - 20 / 38
探知装置およびプログラム

【課題】必要以上に干渉除去を行わず、従来よりも高精度に干渉の検出を行うことができる探知装置を提供する。
【解決手段】送信信号に対するエコーの強度に応じた受信信号を出力する送受信部と、前記受信信号から、干渉信号を検出する干渉検出部と、を備え、前記干渉検出部は、干渉信号であると判断した受信信号の数に応じて、第1の干渉検出処理から、前記第1の干渉検出処理よりも干渉の検出感度が高い第2の干渉検出処理に切り替える、または第2の干渉検出処理から第1の干渉検出処理に切り替える切替動作を実行する。
(もっと読む)
移動体の障害認識方法及び障害認識システム

【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
波源推定装置及び波源推定方法
【課題】コヒーレント波である受信波を推定するとともに、演算負荷を低減できる波源推定装置を提供する。
【解決手段】波源推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源推定装置は、波源の初期推定を行い、初期推定に基づく受信波のモード行列の位相を回転して変換行列を求め、受信波の相関行列を変換行列によって平均化し、波源演算に必要な相関行列を算出する。そして、波源推定装置は、演算過程で算出した変換行列と、先に算出された平均化処理後の相関行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
車両方向特定装置、車両方向特定方法、及びそのプログラム
【課題】風切り音などの雑音によって車両音が埋れてしまう状況下でも、車両の存在する方向を特定する。
【解決手段】各々が、接続された検知用マイク101、102で取得された他車両音と雑音との混合音と、検知用マイク101、102の各々で取得される風雑音よりも低い音圧の風雑音が取得される位置に設置された参照用マイク103で取得された他車両音のフィルタ通過後の音信号との差が最小になるようにフィルタを生成しながら、参照用マイク103で取得された他車両音のフィルタ通過後の音信号を算出することにより、検知用マイク101、102で取得された他車両音が強調された音を抽出する複数の他車両音強調フィルタ部104、105と、複数の他車両音強調フィルタ部104、105で抽出された音の到達時間差又は音圧差から、自車両の進行方向に対する他車両が存在する方向を特定する他車両方向特定部108とを備える。
(もっと読む)
ストリーミング測定値からストリーミング信号を再構築するための方法
【課題】方法が、測定値の作業セット、測定システムの作業スナップショット、内部作業信号推定値、及び外部作業信号推定値を保持することによって、ストリーミング測定値からストリーミング信号xnを再構築する。
【解決手段】現在の測定値の作業セットを使用して、内部作業信号推定値、測定システムの作業スナップショット、及び信号スパース性のモデルが精緻化される。外部作業信号推定値がリフレッシュされる。外部作業信号推定値の係数のサブセットが出力にコミットされる。次のストリーミング測定値及び対応する次の測定ベクトルが受信される。測定値の作業セット、測定システムの作業スナップショット、及び内部作業信号推定値が更新されて、次の測定値及び対応する測定ベクトルが組み込まれる。最も古い測定値及び対応する最も古い測定ベクトル、並びにコミットされた係数のサブセットの効果が除去される。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
【課題】超音速飛翔体の砲撃体を位置決めするための方法を提供する。
【解決手段】方法はアンテナを形成する5以上の間隔をあけた音響センサにより、衝撃波単独信号を計測し、かつタイミングエラー分布を推定し、単独信号から、センサ対に到着する時間差を、信頼度に基づいて決定することにより、飛翔体軌跡を得る。
(もっと読む)
対象体検出方法
本出願は、子どもモニターシステム及び対象体に関するセンサの位置に依存せずセンサの下を通過する子どもと大人を検出して区別する方法が記載されている。本システムは人物が立つ表面への距離を決定し、この距離からの参照距離及び望ましい閾値を決定する。人物がセンサ領域に入ると、人物の頭の頂上への距離が参照距離と比較され、人物が大人か子供かを決定する。大人とは逆に子どもが検出される場合には警告が与えられ、大人が近隣にいる場合には警告は与えられない。 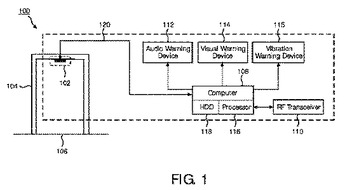 (もっと読む)
(もっと読む)
水中探知装置及び水中探知画像表示方法
【課題】魚単体の遊泳状況を観測容易にする。
【解決手段】水中探知装置は、水中に送波され、魚で反射した受信信号から単体魚及びその位置を周期的に検出する検出手段(5,6)と、周期的に検出された単体魚及びその位置の情報から、同一の単体魚を関連付ける連結処理部71と、検出された単体魚の受信信号から魚体長を算出する魚体長算出部75と、単体魚の遊泳ベクトルを算出する遊泳ベクトル算出部72と、連結された単体魚について、魚体長に対応した計量マーク92a、及び当該単体魚の遊泳ベクトルに対応した変位マーク92bを対応付け、表示部9に表示される2次元座標上の当該単体魚の検出位置に表示する表示制御部8とを備える。
(もっと読む)
発話向き推定装置、方法及びプログラム
【課題】多数のマイクロホンを発話者を囲い込むように配置する必要が無く、かつ残響時間が長い環境下においても適切に発話向きを推定することが可能な、発話向き推定装置を提供する。
【解決手段】複数のマイクロホンから構成されたマイクロホンアレイの周囲で発話者が発話した音声信号を当該複数のマイクロホンで収音し、各マイクロホンで収音した音声信号間の相関を表す相関行列を生成して、この相関行列を固有値行列と固有ベクトル行列とに分解することにより得られた固有ベクトルから、発話者が上記マイクロホンアレイに対しどのような向きで発話したかを推定する。
(もっと読む)
目標深度計測装置
【課題】船底に搭載した送受波器により高精度で安定した深度計測結果を得る目標深度計測装置を提供する。
【解決手段】目標深度計測装置は、送波制御を行なう送信部と、送信部からの制御に基づき音波を送信し、かつ目標からの反射成分を含む信号を受信する送受波部と、送受波部からの受信信号から上下スプリットビームで構成される指向性ビームを複数ビーム形成する受信部と、受信部からの指向性ビームデータから目標深度を計測する目標深度計測部で構成する。目標深度計測部において、各指向性ビームで受信したデータの最大レベルの指向性ビームデータを採用することと、採用した上下スプリットビームデータに対して時間軸方向へ移動平均処理を行なうことと、目標深度として目標からの反射信号の最大レベルを基準に、送信毎に得られる目標深度データを複数データ累加した値を適用することにより、高精度で安定した深度計測結果を得る。
(もっと読む)
パラメタ推定装置、音源分離装置、方向推定装置、それらの方法、プログラム
【課題】空間的エイリアジングの問題が生じても、適切な音源分離を行うための確率分布のパラメタを推定する。
【解決手段】複数の音源それぞれからの音源信号が混合され、2個の収音手段で収音された観測信号を周波数領域に変換することで周波数観測信号を生成し(30、S102)、前記周波数観測信号の前記収音手段間の位相差を計算し(34、S104)、前記位相差の分布に当てはまり、周波数依存性のある確率分布モデルのパラメタを推定する(200、S106)。
(もっと読む)
音源定位装置
【課題】MUSIC法を使用して安定的に音源定位を行なうことができる音源定位装置を提供する。
【解決手段】音源定位装置は、複数チャンネルの音源信号の各々を、200msごとにFFT変換し、周波数帯域ごとに空間相関行列を算出して固有値分解し、複数個の周波数帯域の各々について固有ベクトル及び固有値を算出する固有ベクトル算出部と、この固有値に基づき、第1及び第2の周波数範囲についての固有値プロファイルを算出する第1及び第2の平均値算出部120及び122と、これら固有値プロファイルの組をパラメータとして音源数をk分類法により推定するKNN分類器124と、KNN分類器124により推定された音源数と、マイクロホン素子の配置に関する情報と、固有ベクトルとに基づいて、MUSIC法により音源数と等しい数の音源方位を推定する音源推定部とを含む
(もっと読む)
測位装置および測位方法
【課題】ノイズの影響を受けにくく、高い信頼性を有する測位装置を提供する。
【解決手段】測位装置は、パルス内で周波数成分が変化するTSP(Time Stretched Pulse)信号を発信する発信部10と、発信部10から所定の距離間隔を隔て、互いに離隔して配置されたTSP信号を受信する複数の受信部21、22、23と、各受信部21、22、23の位置情報を格納している記憶部30と、各受信部が受信したTSP信号の周波数成分の変化パターンに基づいて各受信部がTSP信号を受信した時間差を演算し、時間差と記憶部30から取得した位置情報とに基づいて発信部10の位置を演算する演算部40と、を備える構成とする。
(もっと読む)
音源方向推定装置及び方法
【課題】音源方向推定装置において、高い精度で音源の方向を推定可能とする。
【解決手段】音源方向推定装置は、互いに異なる位置に設けられており、移動する音源が発する音を検出する第1及び第2音検出手段(110,120)と、第1音検出手段において音が検出される時間及び第2音検出手段において音が検出される時間の差を、時間差データとして算出する時間差算出手段(130)と、時間差データに対して移動平均処理を行う移動平均処理手段(160)と、移動平均処理が行われた時間差データと、第1及び第2音検出手段間の距離とに基づいて、音源の方向を推定する方向推定手段(180)とを備える。
(もっと読む)
入射波数推定装置及び入射波数推定方法
【課題】各分離信号の時間シフト相関係数値に基づいて入射波数を推定することができる入射波数推定装置を得る。
【解決手段】互いに独立な入射波が混信して得られた受信信号から分離信号を出力する独立成分分析処理部41と、前記分離信号の時間を時間シフト量パラメータだけずらすことにより、時間シフトした分離信号を得る時間シフト部42と、各分離信号と時間シフトした分離信号の時間シフト相関係数値を計算する相関係数計算部43とを設け、各分離信号の時間シフト相関係数値を用いて入射波数を推定する。
(もっと読む)
音源方向検出方法、装置及びプログラム
【課題】受音手段対毎に異なる検出性能の影響を軽減し、高精度で音源方向を検出可能な音源方向検出方法を提供する。
【解決手段】複数の受音手段対5、15、25毎に音源から受音手段対を構成する2つの受音手段に音波が到達する時間差を求め、受音手段対間の距離等に基づき受音手段対毎に信頼度を求める。次いで、複数の受音手段対毎に時間差に基づき音源方向候補を求める。そして、複数の受音手段対毎に得られた音源方向候補同士の差が最小となる音源方向候補の組み合わせを選択し、更に、選択した2つの音源方向候補のうち信頼度が高い受音手段対により求まった音源方向候補を最終の音源方向として決定する。
(もっと読む)
物体検出装置及び当該物体検出装置を用いた車両の開閉制御システム、並びに包絡線の立ち上がり検出方法
【課題】受信波の受信時刻をより正確に求め、物体の検出精度が向上された物体検出装置を提供する。
【解決手段】包絡線W5に対して、包絡線W5のピークを検出し、ピークへ向かう包絡線W5の所定の単位時間TS当たりの変化量δが増加を続ける変化量増加期間における最大の変化量δ-1を傾きとして近似直線Lを取得し、近似直線Lの電圧値が所定の基準電圧VZとなる時刻XPを反射波の受信時刻tRとして取得する。
(もっと読む)
自動追尾スキャニングソナー
【目的】
ソナーにおいて送信波が標的に反射してから自船の探知部に到達するまでの間に、自船が移動してしまうことによる誤差を抑える。
【構成】
自動追尾スキャニングソナーにおいて、GPS及びコンパスの指示値の時系列データを保持するメモリを有し、過去の任意の時刻における自船の緯度、経度、船首方位を推定することができる船位置・方位計算部と、標的からの反射波を自船で受信した時刻における標的の緯度、経度、水深を算出する標的位置算出部とを備える事を特徴とするスキャニングソナー。
(もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
エコー画像の表示装置
【課題】ノイズ画像を抑制しつつ標的のエコー画像を鮮明に表示する。
【解決手段】水中の深度方向の所定範囲を分割して得られる複数のレイヤーのそれぞれについて、探知領域内の各地点におけるエコーを経時的に測定し、レイヤーごとに各地点のエコーレベルの平均値を算出する。次に、算出された各レイヤーにおける各地点のエコーレベルの平均値のうち、最大値を求める。そして、算出された最大値に基づいて、当該地点におけるエコー画像を表示する。例えば、地点Z1においては、魚群G1は全てのレイヤー1〜3にまたがって存在するが、エコーレベルの平均値が最も大きくなるのは、全ての深度に魚群G1が存在するレイヤー2であるから、レイヤー2のエコーレベル平均値に基づいて、地点Z1におけるエコー画像を表示する。
(もっと読む)
1 - 20 / 38
[ Back to top ]