
Fターム[5J083BE41]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | フーリエ変換を行うもの (154)
Fターム[5J083BE41]の下位に属するFターム
Fターム[5J083BE41]に分類される特許
1 - 20 / 36
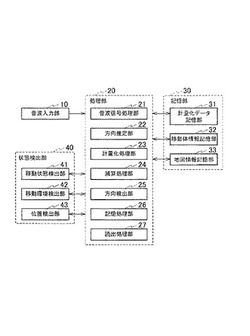
対象位置検出装置及び対象位置検出方法
【課題】雑音の影響を低減して対象の位置を検出できる対象位置検出装置を提供する。
【解決手段】定常的な雑音及び周囲に存在する対象から発生する対象発生音を含む音波を入力する音波入力部10と、単位時間毎の音波に基づいて対象の方向を示す複数の方向推定値を算出する方向推定部22と、方向推定値を方向毎に計量化することにより、第1計量化データを作成する計量化処理部23と、定常的な雑音に基づく方向推定値が方向毎に計量化されたデータとして、第2計量化データを記憶する計量化データ記憶部31と、第1計量化データから、第2計量化データを減算することにより、対象発生音に基づく方向推定値が方向毎に計量化されたデータとして、第3計量化データを作成する減算処理部24と、第3計量化データから対象の方向を検出する方向検出部25とを備える。
(もっと読む)
音源検出装置

【課題】誤検出を低減させ、検出性能を向上させることが可能な接近車両検出装置を提供する。
【解決手段】集音器13,14,15,16により集音された音に基づいて所定の音源を検出する音源検出装置であって、集音された音信号から雑音を抽出する雑音抽出部21と、集音された音信号から雑音抽出部21により抽出された雑音の信号成分を抑制する雑音抑制部22とを備え、音源検出部24が雑音抑制後の音の情報を用いて接近車両等、所定の音源の位置を検出する。このように、音源検出装置は、雑音の信号成分を抑制した音を基に必要な所定の音源の位置を検出するため、雑音の影響を予め排除し、必要な音源のみを検出することができる。
(もっと読む)
被検体情報取得装置、被検体情報取得方法、及びプログラム
【課題】 FDI法及び適応型信号処理を用いて処理した場合、反射波形と参照信号との間で波形のずれが生じると画像が劣化する可能性がある。
【解決手段】 本発明の被検体情報取得装置は、弾性波を受信して複数の受信信号に変換するための複数の変換素子と、被検体内の対象物の形状に対応する複数の参照信号を記憶する記憶手段と、前記複数の受信信号と、前記複数の参照信号のうち少なくとも2つ以上の参照信号と、を用いて、周波数領域干渉計法及び適応型信号処理を行い、前記2つ以上の参照信号毎の電力強度分布を取得するFDI適応処理手段と、を有することを特徴とする。
(もっと読む)
残響フィルタ、アクティブソーナー装置、残響除去方法及び残響除去プログラム
【課題】 反射波から残響を高精度に除去できる残響フィルタ等を提供する。
【解決手段】 残響フィルタ10は、反射波のレベルLがレベル閾値Lthを越えたか否かを検出する反射波検出手段101と、反射波のレベルLがレベル閾値Lthを越えたことを反射波検出手段101が検出した場合に、反射波のレベルLがレベル閾値Lthを越え続ける継続時間Tを計測する継続時間計測手段102と、継続時間計測手段102で計測された継続時間Tが継続時間閾値Tthを越えたか否かを検出し、継続時間Tが継続時間閾値Tthを越えた反射波を残響であると判定し、継続時間Tが継続時間閾値Tthを越えない反射波を目標エコーであると判定する目標エコー判定手段103と、を備えたことを特徴とする。
(もっと読む)
車両方向特定装置及び車両方向特定方法
【課題】複数の車両が存在する環境下でも、車両の存在する方向を特定することができる車両方向特定装置を提供する。
【解決手段】複数の車両音検知マイク101及び102と、検知された周囲音に基づいて、複数の所定の時間区分のそれぞれ及び複数の所定の周波数帯域のそれぞれの組み合わせである分析区間毎に周囲音の音圧を分析する周波数分析部103と、第1の周波数帯における周波数軸上のピークの数をもとに車両の台数を特定する台数特定部105と、第2の周波数帯における周囲音について、分析区間毎に、周囲音の音源方向を特定する音源方向特定部104と、特定された音源方向の、分析区間における分布及び台数特定部105で特定された台数をもとに、台数の車両について、車両が存在する方向を特定する車両方向特定部106を備える。
(もっと読む)
超音波伝搬時間計測方法及び超音波伝搬時間計測装置
【課題】超音波伝搬媒体の非線形音響特性、さらには超音波トランスデューサの伝達特性や超音波伝搬特性をも考慮した超音波伝搬時間計測を行うことによって高精度に計測方法および装置を提供する。
【解決手段】送信部110により送信パルス信号Vtrans(t)を発生し、送信用超音波トランスデューサ130により超音波パルス信号Sx(t)に変換して測定対象の超音波伝搬媒体10に入力し、前記超音波伝搬媒体10を介して伝搬される前記超音波パルス信号Sx(t)を受信用超音波トランスデューサ140により受信し増幅して受信パルス信号Vrec(t−τ)を得て、信号処理部170において、前記超音波伝搬媒体10が有する非線形性を考慮した参照信号と被参照信号との間で相互相関処理をすることによって、前記超音波伝搬媒体10を介して伝搬される超音波パルス信号Sx(t)の送受信間の時間間隔を超音波伝搬時間として検出する。
(もっと読む)
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた情報から前記探知対象物の位置を特定する音波を用いた探知方法。
(もっと読む)
水中音波撮像装置
【課題】 底質が既知でない条件下において、臨界俯角による埋没物体の検出ミスを回避し、また高感度な沈底機雷と埋没機雷の判別技術を提供する。
【解決手段】 ソーナーを備えた移動体10が移動し、ソーナーの送信投影面16が移動するにつれて水底11付近の物体を見る俯角が変化し、画像の視野内に物体が存在している間に俯角が臨界俯角12より小さくなると、その物体が水底堆積層に埋没していたら物体からのエコー受信強度が急に低下する現象を利用する。順次得る複数のソーナー画像13−1,13―2,13−3の間で、物体を示す輝度ピークの値または物体からの受信信号強度を追跡し、追跡した値が所定閾値を横切って低下した場合は、その物体は埋没機雷、追跡した値が閾値を横切らない場合は沈底機雷であると判別する。
(もっと読む)
パーティクルフィルタリングによる移動ロボットからの2次元音源地図作成方法
【課題】移動ロボット本体だけで断続的に取得したセンサデータをもとに方位単独SLAMを行うことができる2次元音源地図作成方法を提供する。
【解決手段】移動ロボットに搭載された遅延和ビームフォーミング法により最適化されたマイクアレイにより音源からの音声データを断続的に取得し、取得した音声データに対し、周波数帯域選択法を利用したパーティクルフィルタリングにより、方位単独SLAM(Bearing only Simultaneous Localization and Mapping)を行い、2次元音源地図を作成することを特徴とする。
(もっと読む)
ストリーミング測定値からストリーミング信号を再構築するための方法
【課題】方法が、測定値の作業セット、測定システムの作業スナップショット、内部作業信号推定値、及び外部作業信号推定値を保持することによって、ストリーミング測定値からストリーミング信号xnを再構築する。
【解決手段】現在の測定値の作業セットを使用して、内部作業信号推定値、測定システムの作業スナップショット、及び信号スパース性のモデルが精緻化される。外部作業信号推定値がリフレッシュされる。外部作業信号推定値の係数のサブセットが出力にコミットされる。次のストリーミング測定値及び対応する次の測定ベクトルが受信される。測定値の作業セット、測定システムの作業スナップショット、及び内部作業信号推定値が更新されて、次の測定値及び対応する測定ベクトルが組み込まれる。最も古い測定値及び対応する最も古い測定ベクトル、並びにコミットされた係数のサブセットの効果が除去される。
(もっと読む)
音響測定方法及びシステム
【課題】指向性マイクロホンを用いて音圧及び/又は音響粒子速度を正確に算出できるような校正処理を備えた音響測定方法及びシステムを提供する。
【解決手段】指向性マイクロホンの指向特性計算を行い、指向特性計算の結果をフーリエ級数展開計算し、フーリエ級数展開計算の結果を用いて指向性の校正処理を行い、更に特定の周波数帯域制限を行うことによって、音圧及び/又は音響粒子速度を正確に計算する。
(もっと読む)
音源方向推定装置及び音源方向推定方法
【課題】定常雑音源を有するシステムにおいて、音源方向を正しく推定する。
【解決手段】固有ベクトルを用いて音源方向を推定する音源方向推定装置1は、音響信号を入力する音響信号入力手段(マイクロフォンアレイ100)と、入力された音響信号の相関行列を算出する相関行列算出手段(相関行列算出部110)と、算出された相関行列を用いて相関行列の固有ベクトルを求める固有ベクトル算出手段(固有ベクトル算出部120)とを備え、固有ベクトル算出手段は、入力信号の相関行列と、1以上の所定の相関行列とを用いて固有ベクトルの算出を行う。
(もっと読む)
発音訓練装置
【課題】訓練者が、正しい発音を行うための唇の形や動き等を直接的に確認することができると共に、効率良く発音の訓練を行うことができる発音訓練装置を提供する。
【解決手段】訓練者音声発生位置において訓練者が発した言語である訓練者発生言語及び指導者音声発生位置において指導者が発した言語である指導者発生言語をそれぞれ認識する言語認識手段と、言語認識手段によって認識した訓練者発生言語を可視化した訓練者発生言語可視化文字に変換すると共に、言語認識手段によって認識した指導者発生言語を可視化した指導者発生言語可視化文字に変換する文字変換手段と、撮像画像内における訓練者音声可視化表示位置に訓練者発生言語可視化文字を表示する制御を行うと共に、撮像画像内における指導者音声可視化表示位置に指導者発生言語可視化文字を表示する制御を行う表示制御手段と、を備える。
(もっと読む)
暗騒音推定装置
【課題】本発明は、実際の暗騒音レベルの変動に迅速に追従でき突発的な騒音への影響を排除できる暗騒音推定装置の実現。
【解決手段】
取得した音響信号のパワー情報と有効期間を対応させてデータセットを生成するデータセット生成手段と、新たに音響信号が入力されるごとに、記憶部に記憶されているデータセットのパワー情報のうち略最大であるパワー情報と入力された音響信号のパワー情報とを比較し、入力された音響信号のパワー情報が記憶部に記憶されたデータセットのパワー情報以上であれば、入力された音響信号を破棄し、入力された音響信号のパワー情報が記憶部に記憶されたデータセットのパワー情報未満であれば、入力された音響信号のデータセットにて略最大のパワー情報を持つデータセットを更新する更新手段と、記憶部に記憶されたデータセットを使用して暗騒音レベルを推定する推定手段を具備する。
(もっと読む)
音源方向推定装置とその方法と、プログラム
【課題】音源方向の推定精度を高める。
【解決手段】この発明の音源方向推定装置は、正三角形の頂点に配置された3つのマイクロホンからなるマイクロホンアレーと、マイクロホンアレーの各マイクロホンで受信された信号を周波数領域の信号に変換する周波数変換部と、異なるマイクロホンのマイクロホン対の組み合わせのそれぞれに対して到達時間差を計算する到達時間差算出部と、到達時間差から音源候補を求め、音源方向候補を分類する音源方向推定部と、を具備する。音源方向推定部は、到達時間差の周波数ビン毎にスパース性が仮定できるか仮定できないかを判定するスパース性判定部を備え、スパース性が仮定できる周波数ビンの到達時間差から音源候補を求め、音源方向候補を分類する。
(もっと読む)
パーティクルフィルタリングを利用した音源位置の推定
音源位置は、パーティクルフィルタリングにより推定され、パーティクルセットは、音源位置を構成する状態変数の確率密度関数を表す。本方法は、音源から少なくとも2つの音声記録位置までの推定された音響伝達関数の間の相関に応答して、パーティクルのウェイトを決定することを含む。ウェイト更新関数は、具体的には、相関から決定的に決定され、相関は、パーティクルフィルタリングの測定関数の擬似確率関数として利用されてもよい。音響伝達関数が、音源に対するオーディオビームフォーミングから決定される。オーディオウェイトは、マルチモーダルパーティクルフィルタリングアプローチを生成するため、ビデオウェイトと合成される。  (もっと読む)
(もっと読む)
信号処理装置、および信号処理方法、並びにプログラム
【課題】混合信号について高精度な分離処理および音源方向推定処理を可能とする構成を提供する。
【解決手段】複数音源からの出力を混合した混合信号からなる観測信号に対して、独立成分分析(ICA)を適用した学習処理により分離行列を求めて分離信号を生成するとともに、時間周波数領域において対応する時間区間の観測信号と分離信号との間で相互共分散行列を計算し、相互共分散行列の要素同士の位相差を算出して、算出した位相差を適用して各分離信号に対応する音源方向を算出する。具体的には、相互共分散行列の要素同士の位相差情報を利用して、位相角と周波数との比例定数(直線の傾き)を算出し、比例定数を利用して各分離信号に対応する音源方向を算出する。
(もっと読む)
複数信号区間推定装置とその方法と、プログラムとその記録媒体
【課題】複数音源が同時に存在している場合にも頑健な信号区間検出を行う。
【解決手段】この発明の複数信号区間推定装置は、周波数領域変換部と、音声存在確率推定部と、到来方向推定部と、到来方向確率計算部と、乗算部とを具備する。音声存在確率推定部が各フレームにおける音声存在確率を計算する。到来方向推定部と到来方向確率計算部とが、各フレームの全ての周波数における音声到来方向確率を推定する。そして、乗算部が音声存在確率と音声到来方向確率を乗算した値を、全ての音源について、発音確率として出力する。これにより各フレームにおいて複数の音源の存在を許せるようになるため、欠損の少ない区間検出が可能になる。
(もっと読む)
少なくとも2個のインパクトの位置を決定するための方法
【課題】1個以上のセンサーを使用して、表面上の少なくとも2個のインパクトの位置を決定するための方法。
【解決手段】インパクトF1とF2は1個以上のセンサーによって検知される信号を発生し、各センサーは検知信号si(t)、i=1〜n(nはセンサーの数)を供給する。振幅の異なる同時のインパクトを決定できるために、上記方法は、1個のインパクトの位置xを特定するステップと、各々の検知信号si(t)と位置jにおける基準インパクトRjに対応する所定の基準信号rij(t)の比較、特に相関に基づく、上記特定されたインパクトによる寄与分が減少される各センサーの修正検知信号si’(t)を決定するステップとを有する。また、検知信号のカップルに基づいた方法と装置に関係する。
(もっと読む)
目標信号検出方法、装置およびプログラム
【課題】方位誤差を小さくすると共に雑音を分離し目標信号を容易に認識可能にする手段を提供する。
【解決手段】周波数分析101で受信音響信号を周波数分析し、方位計算前処理部102で分析された周波数ごとに方位ベクトルを算出し、方位計算後処理部103で算出された周波数ごとの方位ベクトルから目標信号の到来方位を算出する。その際方位計算後処理部103は、予め設定された下限周波数と上限周波数の間の前記方位ベクトルに対して、予め設定された周波数シフト幅だけシフトさせながら、各シフト位置において予め設定された周波数帯域幅内に含まれる前記方位ベクトルを加算して加算ベクトルを算出し、該各シフト位置で算出された加算ベクトルの中から最大のベクトル値を示す加算ベクトルを選択し、該選択した加算ベクトルの方位及びベクトル値を目標の方位及び集中度として表示処理部104へ出力する。
(もっと読む)
1 - 20 / 36
[ Back to top ]