
Fターム[5J083DB03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 応答器を用いるもの (85) | 応答器の構成 (83) | 移動体が応答器を持つもの (22)
Fターム[5J083DB03]に分類される特許
1 - 20 / 22
波源推定装置及び波源推定方法

【課題】コヒーレント波である受信波を推定するとともに、演算負荷を低減できる波源推定装置を提供する。
【解決手段】波源推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源推定装置は、波源の初期推定を行い、初期推定に基づく受信波のモード行列の位相を回転して変換行列を求め、受信波の相関行列を変換行列によって平均化し、波源演算に必要な相関行列を算出する。そして、波源推定装置は、演算過程で算出した変換行列と、先に算出された平均化処理後の相関行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
室内位置情報管理システム及び室内位置管理方法

【課題】
室内における位置計測対象の位置情報を管理することができ、室内に物理的な制約を設けずとも、室内を滞在可能な区域と不可能な区域とに分割することができ、かつ位置計測対象毎に侵入可否区域を設定することができる室内位置情報管理システム及び室内位置情報管理方法を提供することを目的とする。
【解決方法】
送信装置の位置情報と、位置計測対象毎に固有に設定された少なくとも3種類の区域を設定する許可区域情報とに基づいて、前記位置計測対象が該許可区域情報で許可されない区域に存在する場合には警告を通知し、前記少なくとも3種類の区域が、侵入禁止区域、通過可能区域及び滞在可能区域を含むことを特徴とする室内位置情報管理システム及び室内位置情報管理方法が提供される。
(もっと読む)
高精度なロバスト超音波屋内測位システム
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
建設機械と作業員との接触事故防止システム
【課題】 通常の建設機械と作業員との接触事故の防止を図るとともに、重機の周囲で作業する作業員が他の重機のオペレータとして作業するような場合を想定してた場合にも、危険状態の誤認、警戒信号鳴動等の誤動作が生じないようにする。
【解決手段】 建設機械側10と、その信号到達範囲を監視エリアA1,A2とした際に、監視エリアA1,A2内にいる作業員W側との間で、近接危険情報を交信し、必要に応じた警報を発する応答警報手段を備えた建設機械10と作業員Wとの接触を防止するシステムにおいて、建設機械10とは別の他の建設機械10’に、作業員W側からの応答信号発信を停止させる信号キャンセル手段15を備える。そして作業員Wが操縦者Dとして他の建設機械10’へ搭乗する場合に、信号キャンセル手段15を用いて応答信号発信を停止して誤信号の発信を防止する。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
ホースラインの形状検出システム
【課題】海中に配置されているホースラインの形状確認を行うことができ、しかも油の給送が行われている間や海象条件が悪い時でも正確な形状確認を行うことのできるホースラインの形状検出システムを提供する。
【解決手段】検出装置20から5.5kHzの音波が海中に向かって発信され、その音波に応答して各トランスポンダ10,11からそれぞれ所定の周波数の音波が発信され、検出装置20によって各トランスポンダ10,11との距離及び検出装置20に対する各トランスポンダ10,11の配置されている方向が検出される。また、検出装置20の検出結果に基づいて各トランスポンダ10,11の位置座標が前記所定時間おきに制御ユニット30によって演算されるとともに、前記所定時間おきに記憶装置31に記憶される。
(もっと読む)
マルチオブジェクト測位システムおよび電力制御ベースの多重アクセス制御方法
【課題】既存のENとHNの問題を効果的に解決し、かつ信号の衝突を解決し、システムの時空間再使用性能を改善することが可能である多重アクセスコントロール方法を提供。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
(もっと読む)
位置検知システム
【課題】移動体の位置を検知する。
【解決手段】送信時刻情報を含むパケットを受信する手段と、パケットを受信してから一定経過時間後に、受信したパケットと同一内容のパケットを送信する手段とからなる移動ノードと、送信時刻情報を含むパケットを送信する手段と、移動ノードが送信したパケットを受信する手段と、受信パケットに含まれる送信時刻情報と、該パケットを受信した時刻情報と、一定経過時間情報とに基づいて、移動ノードとの距離を求める手段とからなる第1の固定ノードと、第1の固定ノードが送信したパケットを傍受する手段と、移動ノードが送信したパケットを傍受する手段と、傍受した2つのパケットの受信時間差に基づいて、移動ノードとの距離を算出する手段とからなる複数の第2の固定ノードと、第1の固定ノード、複数の第2の固定ノードのそれぞれと移動ノードとの距離情報とに基づいて移動ノードの位置を算出する手段とを備えた。
(もっと読む)
TOA(到達時刻)とRSS(受信信号強度)の融合による適応型測位法、装置、およびシステム
【課題】適応性、信頼性、高精度、拡張性、低コストな、適用型測位方法、装置、およびシステムを提供する。
【解決手段】対象から発信された信号のTOA結果およびRSS結果を収集する観測結果収集器と、収集されたTOA結果の数を決定するTOA結果カウンタと、入力されたTOA結果の数に基づいて移動体の位置計算法を選択し、選択された計算法を使用して移動体の位置を計算する位置計算器とを備える。TOA結果の数に基づいて適応的に適応型測位法を選択することが可能である。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】高精度、配置しやすさ、較正不要、低コスト、装置内調整および柔軟性などの利点がある、対象の所在確認および追跡を行う単一装置上の位置決定機能(POD)、自律型超音波屋内追跡システム(AUITS)を提供する。
【解決手段】AUITSは、RF信号および超音波信号を送信するためのRFトランシーバ205および超音波送信器206を含み、移動する対象に設置されたタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し、移動する対象の所在を確認するPOD202とを備える。PODは、複数のリーフモジュール207から構成され、各リーフモジュールに位置信号の受信器208があり、タグ装置から送信された位置信号を受信し、リーフモジュール間に既知の構造トポロジー関係がある。次に、各位置信号受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、対象の位置が計算される。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、周期的に切替えられる複数のアンテナから発信される高周波信号を携帯端末により受信して相対位相を算出し携帯端末の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための装置およびプログラムに関するものである。
【構成】基地局1において、複数の指向性アンテナ11a〜11dの間隔を1波長以下として周期的に切替えながら高周波信号を発信し、前記指向性アンテナ11a〜11dの指向性の方向を斜め下方に向けて角度を持たせて設置し、携帯端末2により受信される高周波信号の位相差を測定して携帯端末2の相対的な位置関係を高精度で検知するための計算式を開示する。
(もっと読む)
移動体通信及びその位置測定
超音波位置測定システムは、基地ユニットと少なくとも一つの移動ユニットとを備えている。移動ユニットおよび基地ユニットの各々は超音波信号を送信および受信するように動作可能となっている。移動ユニットは、前もって決められた信号を基地ユニットの送信状態に従って送信するように構成されている。基地ユニットは、信号が移動ユニットから基地ユニットまで伝わるのにかかる時間を測定することにより移動ユニットと基地ユニットとの間の距離を計算するように構成されている。 (もっと読む)
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 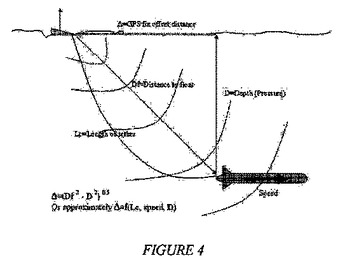 (もっと読む)
(もっと読む)
超音波を用いた三次元無線位置検出
本発明は、1つの移動式超音波送受信器を備えた移動式無線式構成要素と、所定の間隔を隔てた関係にある複数の固定式超音波送受信器を備えた固定式構成要素との間の位置検出方法を提供し、その方法は、無音時間を設定するために全ての送受信器をオフにするステップ、超音波信号を送信するために1又は複数の固定式送受信器を起動するステップ、通常、信号の送信と同時に、複数の固定式送受信器のそれぞれに対応した複数のタイマーを開始させるステップ、移動式送受信器で信号を受信するステップ、信号の受信に反応して移動式送受信器から信号を送信するステップ、各固定式送受信器で移動式送受信器により送信された信号を受信し、通常、最初の20個の受信されたエッジ、好ましくは最初の10個の受信されたエッジの中から見つけられた1つの受信されたエッジ、より好ましくは最初に受信された立ち上がりのエッジを受信したときに各タイマーを停止させるステップ、音速を表す所定の定数と各タイマーによって測定された各固定送受信器への信号の移動時間に基づいて移動式送受信器と各固定式送受信器の間の距離を演算するステップ、及び固定式構成要素に対する移動式構成要素の三次元位置を測定するために、演算された距離を用いて三角法の計算を実行するステップを備えている。  (もっと読む)
(もっと読む)
超音波式3次元位置計測装置
【課題】
複数の超音波発信器の各3次元位置を求める処理を行う超音波式3次元位置計測装置を提供する。
【解決手段】
各超音波受信器が得た距離情報の数を調べて信号を発信した超音波発信器の個数と同じ数の距離情報を持つものの中から3個の受信器を選択し、選択した3個の超音波受信器の距離情報より行列の各行として1つの超音波受信器が受信した順に距離情報を並べた距離行列を作成し、作成した距離行列の各行について要素を入れ替えることで第2の距離行列を作成する。第2の距離行列の各列の距離の組み合わせに対して同じ発信器からの距離情報として仮定して当該発信器の3次元位置を計算し、選択した3個の受信器以外の受信器の距離情報を用いて、3次元位置を評価し、この処理を繰り返し全ての組み合わせの評価値を得て、その中の最小の評価値を与えた3次元位置を3次元位置推定値として出力する。
(もっと読む)
RFIDタグの位置特定の方法及び装置
RFIDタグが、当該タグの位置の確定を容易にすると同時に、タグのバッテリのエネルギー消費(306)を最小限する方法及び装置である。所定間隔で、タグは、その識別子をステータス情報と共に送信する(302)。ステータスが、タグが新たな位置にあることを示す場合(304)、タグは、当該タグの位置の確定に関与することにより追加のバッテリエネルギーを消費する(306)。異なる速度で伝播する2つの信号をインタロゲータから送信することにより(602/604)、インタロゲータからタグまでの距離が確定される。タグにおける2つの信号の到達時刻の差を確定することにより、インタロゲータからタグまでの距離を確定することができる(606)。  (もっと読む)
(もっと読む)
追尾システムおよび自走体
【課題】移動体とそれを追尾する自走体とを結ぶ直接経路が障害物によって遮断された場合にでも、移動体の相対位置を推定できる追尾システムを提供する。
【解決手段】移動体に配置されたトランスポンダと、トランスポンダを追尾する自走体とを含む追尾システムであって、自走体は、周囲の床面あるいは天井面に関する反射環境情報を入手する環境検知手段を備える。自走体は、第1の超音波を送信し、それを受信したトランスポンダは第2の超音波を送信し、次いで第2の超音波を受信することによって、トランスポンダから自走体に直接届く直接波と床面あるいは天井面を介して届く反射波とに関する受信情報を入手し、さらに受信情報と反射環境情報とを用いて、受信された第2の超音波が直接波であるか反射波であるかの判断を行い、その判断に基づいて受信情報を処理してトランスポンダの位置を推定し、追尾する。
(もっと読む)
海の中の個人のための信号伝達/位置検出装置及びその使用方法
海の中の個人のための信号伝達及び位置検出装置及びその使用方法。この海の中の個人(1)のための信号伝達及び位置検出装置は、海の中の個人(1)が携帯し、第1の信号(2a)の搬送波を送信するように設定された個人警報器(2)を構成する超音波送信器と;海面上に配置され、個人警報器(2)によって送信された第1の信号(2a)を抽出することができる水中アンテナ(4)と、第2の超音波信号(2b)を送信する手段と、第2の超音波信号(2b)に応答して受信された超音波信号の関数として個人警報器(2)の位置を計算すること、及びGPS等の全地球測位システムの座標に前記情報を変換することができる手段と、無線受信機(6)を備えた携帯又は固定警報処理センター(7、8)にこれらの座標を示す信号を送信することができる電波(5)を送信するための装置と、を備える地表観測手段(3)と;を具備する。  (もっと読む)
(もっと読む)
潜水船の追跡のための装置及び方法
潜水船(11)の追跡のための装置及び方法において、プラットホーム(13)は、潜水船(11)の現在位置の規定のための追跡装置(15)と一緒に水中内に投入され、かつ潜水位置で三次元的に安定にされるようになっている。このために、プラットホーム(13)は、水平方向若しくは垂直方向に作用する操縦駆動部(18,19)を有しており、該操縦駆動部は制御回路内に配置されている。  (もっと読む)
(もっと読む)
1 - 20 / 22
[ Back to top ]