
Fターム[5J083EA14]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示方法 (282) | 表示形態 (108) | Bモード (36)
Fターム[5J083EA14]に分類される特許
1 - 20 / 36
被検体情報取得装置、被検体情報取得方法、及びプログラム
【課題】 FDI法ならびに適応型信号処理を用いて処理した場合、走査線の隣接間で連続性が乏しい部分が生じる可能性がある。
【解決手段】 本発明の被検体情報取得装置は、被検体からの弾性波を受信し複数の受信信号に変換するための複数の変換素子と、前記複数の受信信号を用いて整相加算処理を行い、複数の走査線信号を出力する整相加算手段と、前記複数の走査線信号を隣接する走査線間で加算して複数の合成走査線信号を出力する走査線信号合成手段と、前記複数の合成走査線信号を用いて周波数領域干渉計法及び適応型信号処理を行い、電力強度分布を取得するFDI適応処理手段と、を有する。
(もっと読む)
超音波診断装置

【課題】超音波診断装置において、受信信号中に含まれるサイドローブ成分等の不要信号成分を抑圧するに際して過度の抑圧を防止する。
【解決手段】複数の素子受信信号から、チャンネル方向に並ぶ複数の符号ビットが取り出される。二値化回路54は、複数の符号ビットに対して二値化処理を適用し、これによって符号データ列を生成する。評価値演算部38においては、周波数軸上において符号データ列が有するDC付近成分のパワーに基づいて評価値(GSCF)を演算する。その評価値によって乗算器60において受信信号の利得が調整される。二値化処理を経るので、サイドローブ成分が過度に評価されることを防止でき、また、DC付近成分を参照するのでメインローブ成分に若干の揺らぎがあってもそれを適正に評価できる。
(もっと読む)
魚群探知装置
【課題】 従来の魚群探知機の表示では、縦方向スケールと横方向スケールの比率が一定ではなく、感覚的に表示画面が見にくいという点である。
【解決手段】 第1のメモリ10から読み出された反射波信号によって深度レンジデータ出力部17で深度レンジデータを作成し、第1のメモリ10から読み出された船速データ付き反射波信号は横尺計算部18に入力され、深度に応じた横尺が計算され、この計算値に応じて横尺の伸縮度が横尺伸縮部19で、表示装置16で表示される画像の横幅の伸縮度が計算され、第1のメモリ10から読み出された反射波信号は計算された伸縮度に応じて伸縮され、この伸縮された反射波信号は第2のメモリ20に入力され、第2のメモリ20から読み出された伸縮された反射波信号は伸縮画像作成部21に入力されて画像信号に変換され、表示装置16で図2のBで示された画面の水底Cは、図2の深度に応じて横尺度が一致され、図3の水底Dで示すように、深度と一致した横尺度に伸縮されるので、実際の地形に近い表示になる。
(もっと読む)
水中探知装置
【課題】干渉波か否かの判断をより高精度で行う。
【解決手段】受信信号を順次サンプリングして、深度区分毎の受信データとしてメモリ6に記憶する制御部10と、メモリ6に記憶された受信データを用いて、各深度区分の受信データに対して順次、干渉除去処理を行う干渉処理部7とを備える。干渉処理部7は、対象となる距離区分を含む連続5つの距離区分列の各受信データを少なくとも用いて、対象となる受信データが干渉波によるものか否かを距離区分毎に判断する干渉波判断部8と、受信データが物標からの反射波によるものと判断された場合、該受信データを表示用データとし、受信データが干渉波によるものと判断された場合、該受信データに対して前回と前々回の受信データを用いて表示用データを作成する表示信号作成部9とを備えた。
(もっと読む)
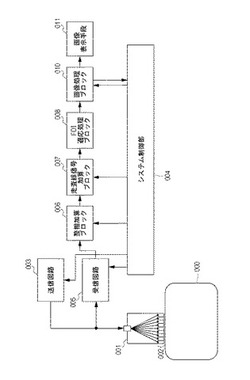
測定装置
【課題】適応型信号処理と空間平均法を使用した画像化を行う測定装置において、高速な信号処理を可能とする。
【解決手段】測定装置は、被検体内を伝播してきた超音波を複数の超音波変換素子で受信することにより得られたアナログ信号を用いて被検体内の画像データを生成する測定装置であって、前記アナログ信号をデジタル信号に変換する信号変換部と、前記デジタル信号に適応型信号処理を行い、画像情報を生成する演算手段と、前記信号変換部から前記演算手段に転送される前記デジタル信号のデータ量を削減するデータ間引き手段と、を有する。
(もっと読む)
探知装置およびその表示制御方法
【課題】記憶部に記憶された画像データの中から、利用者が表示部に表示させたい画像を容易に探すことが可能な探知装置を提供する。
【解決手段】表示部40の表示領域41の全体に、連続する複数の画像を右側から左側に送るように表示させる第1の表示モードと、表示部40の表示領域41を3段に分割して、分割された表示領域41a、41b、および41cに順に、連続する複数の画像を右側から左側に送るように表示させる第2の表示モードとを切り替えることが可能なように構成され、第2の表示モードにおいてカーソル46で選択された画像が、第1の表示モードにおいて拡大されて表示領域41の全体に表示される。
(もっと読む)
魚群探知機
【課題】単体魚等の小さな物標からの有用なエコーを損なわずに、他の超音波装置からの干渉を除去できる魚群探知機を提供すること。
【解決手段】干渉除去対象とするデータの深度を含む第1深度範囲に属する今回のデータから求めた第1特徴値と、干渉除去対象とするデータの深度を含む第2深度範囲に属する前回のデータから求めた第2特徴値とを比較し、第1特徴値のほうが小さい場合は干渉除去対象とするデータをそのまま出力し、第2特徴値のほうが小さい場合は干渉除去対象とするデータと同じ深度の前回のデータを出力する干渉除去部を設ける。
(もっと読む)
魚群探知機
【課題】魚群の位置や移動方向を容易かつ迅速に理解できる魚群探知機を提供する。
【解決手段】画像表示器9の反響波表示領域27に、上下の基準線Lに対して左右対称の水深方向が設定され、且つ該基準線Lに沿って時間軸Tが設定された左右の区画表示域27a,27bを備え、船の左側に備えた送受波部20aから得た反響波情報を、左区画表示域27aに、船の右側に備えた送受波部20bから得た反響波情報を、右区画表示域27bに、時間軸Tに沿って時系列順に夫々表示するようにしたものであるから、船の左右いずれの方向に魚群がいるかを容易に理解できると共に、左右の反響波情報を容易かつ直感的に関係付けることでき得るため、釣果が向上し易い。
(もっと読む)
ソーナー受信装置
【課題】リアルタイムで全方位範囲の聴音情報を得ることができ、目標判別に要する時間を短縮して時間的効率を向上させる
【解決手段】アクティブソーナー装置20は、聴音系9が、Bスコープ表示上のカーソルの方位を計算し聴音中心チャネル情報を設定する中心CH設定部10と、全ビームチャネルの受信信号それぞれにカーソル方位からのずれた方位に対して、左右の耳の指向性の差に相当する音量差及び左右の耳の位置による到達時間差を計算するCH毎音量・時間差設定部11と、CH毎音量・時間差設定情報をもとに全ビームチャネルの受信信号の左用及び右用それぞれにCH毎音量・時間差を付与するCH毎音量・時間差付与部12と、予め2系統に分岐された左用及び右用受信信号それぞれで出力の和を合成し可聴帯域の聴音信号に変換する左用及び右用聴音処理部14、15などを含んでいる。
(もっと読む)
2次元画像データ生成方法及び探査装置
【課題】 従来、土中内部の映像化を行う際、その表現精度に問題があった。従来の電磁波を用いた探査技術は天候や地質により精度が大幅に変化した。また、打撃法による弾性波を用いた探査技術では振動を発生させる際の再現性が乏しく、雑音の影響を受けやすい。
さらに、映像化手法においてはデータを間引くCMP重合法という逆解析が頻繁に用いられるが、その時、弾性波土中伝播速度測定誤差や受信器設置位置の誤差が微小であったとしても、逆解析により、それらの誤差が大きくなり、結果として映像化誤差要因となってしまう。
【解決手段】 天候や地質の影響を受けにくい弾性波を再現性の高い振動子を用いて発生させた。また、CMP重合法などのデータを間引く逆解析を行わないことで、誤差低下させ、精度の高い2次元画像データ生成方法を発明した。さらに、その方法を実行するための探査装置も発明した。
(もっと読む)
GPS魚群探知装置
【課題】 従来の魚群探知装置では、自船の周囲に何も表示されていないために、現在の探知エリアをプロッタ上で把握することはできないという問題があった。
【解決手段】表示地図作成部12からの表示地図データは画像用メモリ15で記憶され、超音波振動子16が接続された受信回路17にエコー検出器18が接続され、エコー検出部18に水深検出部19が接続され、水深検出部19は探知範囲直径計算部20に接続され、探知範囲直径計算部20に指向角データ出力部21が接続され、探知範囲直径計算部20の出力は表示円直径計算部22に接続され、表示円直径計算部22に地図縮尺データ出力部14からの地図縮尺データが入力され、表示円直径計算部22の出力は表示円作成部23に入力され、表示円作成部23の出力は画像メモリ15で記憶され、画像用メモリ15の出力は画像表示回路24に入力され、画像表示回路24の出力は画像表示装置25に入力される。
(もっと読む)
魚群探知機
【課題】魚探画面において、魚群と水底の堆積層の詳細な状態を同時に把握することは困難だった。
【解決手段】対象を探知する探知信号を送信し、反射信号を受信する送受信部と、反射信号に基づいて水深または水底を検出する検出部と、反射信号を可視化する際、反射信号のうち、水深または水底を基準としてユーザからの設定により定まる境界の上方の反射信号からユーザからの設定による第一の感度で第一の対象を選別可能とし、境界の下方の反射信号から第一の感度とは異なるユーザからの設定による第二の感度で第二の対象を選別可能とし、表示処理部は、境界の上方を一つの探知画像の第一表示領域に表示させ、境界の下方を一つの探知画像の第一表示領域より下方の第二表示領域に表示させる魚群探知機とする。
(もっと読む)
釣り情報表示装置
【課題】釣り情報表示装置において、仕掛けの水深をより正確に表示できるようにする。
【解決手段】魚探モニタは、モニタ表示部と情報表示制御部とを有している。情報表示制御部は、スプールから繰り出された釣り糸に係止された仕掛けの第1水深データを獲得可能な電動リールから出力される第1水深データを受け付けるとともに、魚群探知機から第2水深データ受け付ける。そして、決定ボタンが操作されると、第1水深データ及び第2水深データをもとにして、第1水深データ補正して補正第1水深データを得、第1水深データを水深データ表示手段に図形表示させるとともに、水深データ補正手段により第1水深データが補正されると、補正第1水深データを表示部に図形表示させる。また、魚群タ探知機から得られた第2水深データをグラフィック表示する。
(もっと読む)
水中探査装置
【課題】超音波探査機能と水中可聴音聴取機能とを備える簡易・安価な超音波探査装置を提供する。
【解決手段】水中探査装置は、水中に超音波信号を送波する超音波送波器14を備えた超音波送信部11,12,13,30と、水中の物体からの反射信号を受波する単一または複数の送受共用もしくは専用の超音波受波器14を有する超音波受信部30,13,15,16と、この超音波受信部が受信した反射超音波信号を処理して水中の反射物体として表示する表示部17,18,19とを含む超音波探査部とに加えて、超音波受波器14が受波した可聴音信号を分析する音響分析手段と、この分析結果をする反射物体の表示位置に対応する異なる位置に表示する表示手段と、水中可聴音信号を魚群の検出時に音響出力する水中可聴音聴取部31a,32,33a,34,35とを備えている。
(もっと読む)
超音波探知装置および超音波探知方法
【課題】サイドローブによる偽像が表示されない超音波探知装置および超音波探知方法を提供する。
【解決手段】受信ビーム形成部9L、9Rは、振動子2L、2Rなどの受信信号から左受信ビーム信号、右受信ビーム信号を形成する。両受信ビームでスプリットビームが構成される。位相差算出部11はスプリットビームの位相差を算出する。メインローブ信号抽出部12は、1走査分の各走査角度での位相差データから位相差のゼロクロス点を探し、ゼロクロス点の前後で位相が±180度変化するときの走査角度幅を算出する。さらに、この走査角度幅とゼロクロス点における既知のメインローブ角度幅との比率に基づいて、受信信号がメインローブまたはサイドローブのいずれで受信されたかを判定し、サイドローブで受信されたと判定した場合、当該受信信号に係る画像を表示しないようにする。
(もっと読む)
魚群探知機および魚群探知機の測定情報表示方法
【課題】過去の反響波情報と自船位置との対応付けが容易な魚群探知機を提供する。
【解決手段】測定情報指定手段26によって指定された時点の反響波情報が、反響波表示用ウインドウ28内の予め規定された基準ライン上に位置するように制御するとともに、測定情報指定手段26によって指定された前記反響波情報を測定した自船位置が、航跡表示用ウインドウ27に表示する航跡画像29において、航跡表示用ウインドウ27内の予め規定された原点に位置するように制御するようにした。
(もっと読む)
超音波探査装置
【目的】
構成が簡易・安価であるという利点を保ったまま、船の動揺による送受信素子の傾斜による影響を排除し、確度と精度を向上させた超音波探査装置を提供する。
【解決手段】
本発明の超音波探査装置は、超音波信号を送信する送信部と、この送信された超音波信号の物体による反射波を受信し受信信号を出力する複数の受信素子を備えた受信部と、複数の受信素子の配置と各受信素子から出力される受信信号の位相差とから物体の方位を検出する方位検出部と、受信信号の出現時点および振幅から物体の距離および反射強度を検出する距離・反射強度検出部と、前記検出された方位、距離および反射強度を表示用データとして画面表示する表示処理部とを備えた超音波探査装置であって、受信部の傾斜を検出する傾斜検出部を備えた構成となっている。
(もっと読む)
超音波診断装置
【課題】血流状態の把握が必要な観察対象をカラードプラ・モードまたはパワードプラ・モードによるドプラ画像にて、常にリアルタイムで最適に観察する。
【解決手段】画像処理装置5は、超音波送信部11、超音波受信部12、送受信制御部13、Bモード信号処理部14、Bモード画像生成保存部15、画像合成部16、ドプラ信号処理部18、ドプラ画像生成保存部19、ドプラ走査領域設定部17、ドプラ走査領域格納部20、ドプラ走査制御部22、領域マーカ移動制御部23、領域マーカ画像生成部24を備えて構成される。
(もっと読む)
調整可能な流体レンズを使用するモーションの超音波検出方法及び装置
音響波を使用して、人体におけるモーションを検出する実際的で費用対効果の良い方法を提供すること。体内でのモーションの検出のためのシステム200は、音響プローブ242、100、モーション検出プロセッサ270、可変電圧源290、及び制御器を含む。音響プローブ242、100は、音響変換器244、20及び音響変換器に結合されている可変屈折音響レンズ242、10を含む。可変屈折音響レンズは、少なくとも、電極に渡って印加される選択された電圧に応答して、可変屈折音響レンズの少なくとも一つの特性を調整するように適合化されている少なくとも一組の電極150、160a、160bを持つ。モーション検出プロセッサは、アルゴリズムを実行して、音響変換器に結合されかつ音響変換器によって受信される音響エネルギーに応答して目標物のモーションを検出する。可変電圧源は、一組の電極に選択された電圧を印加する。制御器は、可変電圧源を制御して、一組の電極に選択された電圧を印加する。  (もっと読む)
(もっと読む)
超音波アレイセンサシステムおよび遅延加算処理方法
【課題】 反射波を球面波とみなす必要がある程度の近距離でも超音波アレイセンサとして正確に距離と方向を測定する超音波アレイセンサシステムを提供する。
【解決手段】 超音波アレイセンサ10は超音波センサ素子11を複数個所定間隔に並べたもので、反射体から到来する超音波反射波を各々の超音波センサ素子11で受信する。遅延加算処理部20により各々の超音波センサ素子11において受信した受信信号に対して、遅延加算処理の基準点における受信信号の受信タイミングに合わせるべく他の超音波センサ素子の受信信号を遅延させ合算する。画像処理部30は画像処理を行なう。遅延加算処理部20において超音波反射波を球面波とした遅延加算処理アルゴリズムを採用するが、超音波反射波が継続信号として時間幅を持った受信信号である場合、遅延時間の時間関数の時間成分を各超音波センサ素子11において当該受信信号が受信され始めた時刻で固定し演算する。
(もっと読む)
1 - 20 / 36
[ Back to top ]