
Fターム[5J084AA01]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 存在検知 (455)
Fターム[5J084AA01]の下位に属するFターム
特に動く物体の存在検知 (112)
特に静止物体の存在検知 (33)
Fターム[5J084AA01]に分類される特許
101 - 120 / 310
物体検出方法及びその装置

【課題】監視領域上における走査光の走査位置を基準にしなくても、監視領域の全体分に応じた走査光の反射光に関するデータを用いた正確な物体検出を実現すること。
【解決手段】信号処理部3で生成された計測データDを制御装置6がパケット通信により受信して、その計測データDを計測データ記憶領域64aの対応するアドレス箇所に記憶させる度に、受信した所定本数分の走査線に対応する計測データDからそれらの走査線上に存在する物体の検出を行い、さらに、解析結果記憶領域64bに記憶された最新の1フレーム分の物体検出データを用いて、走査範囲Eに存在する物体の検出を行う。1回のパケット通信により制御装置6が信号処理部3から受信する計測データDのデータ量は、走査線の1本分の計測データDと一致するデータ量とすることができる。
(もっと読む)
物体認識装置、プログラム

【課題】様々な大きさの物体を精度よく検出する物体認識装置及びプログラムを提供する。
【解決手段】受光信号の受信強度分布をセグメント化し(S110〜S130)、セグメントが過大セグメントである場合に、セグメントのピークの受信強度Apに、物体までの距離に応じて近距離であるほど小さな値となる閾値係数αを乗じることで領域抽出閾値THaを求め(S140〜S200)、その領域抽出閾値THaより信号強度が大きいセグメント内の領域の幅を、セグメントが表す物体の幅に設定する(S210)。これにより閾値係数α(ひいては領域抽出閾値THa)が大きくなる遠距離では、ビームのすそ野部分の影響が極力排除されるため、物体の幅が過大に検出されることがなく、閾値係数αが小さくなる近距離では、すそ野部分の一部を物体が存在する領域として取り込むことになるため、端ビームが無視されても物体の幅が実際より小さく検出されることがない。
(もっと読む)
物体検出システム
【課題】複数のレーザセンサを備えた物体検出システムにおいて、あるレーザセンサから出力したレーザ光を他のレーザセンサが検出することによる誤検出を抑制する。
【解決手段】レーザセンサAは、自身の回転ミラー50の回転角度を算出し(ステップS2)、また、他方のレーザセンサBの回転ミラー50の回転角度を取得し(ステップS3)、これらステップS2、S3で算出、取得した回転角度と、記憶装置130に記憶されている誤検出角度関係とから、誤検出の危険性があるか否かを予測する(ステップS4)。そして、誤検出の危険性があると予測した場合、誤検出の危険性がなくなるように、モータ80の回転速度を調整する(ステップS5)。そのため、レーザセンサBから出力されるレーザ光L3を自身のフォトダイオード100が検出してしまうことが抑制され、その結果、実際には存在しない物体を検出したと判断してしまう誤検出を抑制できる。
(もっと読む)
マップ作成方法および装置とそのマップを利用した定位方法
【課題】レンジデータと画像特徴点とを連合させるマップ作成および定位方法を提供し、作成された環境デジタルマップをパーソナルナビゲーション装置(PND)にも提供できるようにする。
【解決手段】マップ作成方法が提供される。環境が走査されて環境障害物の深さ情報を獲得する。環境の画像が捕捉されて画像平面が生成される。環境障害物の深さ情報が画像平面に投影されて、投影位置を獲得する。少なくとも1つの特徴ベクトルが、画像平面中の各投影位置周辺の予め決定された範囲から計算される。環境障害物の深さ情報および特徴ベクトルが合併されて、一時点に対するサブマップが生成される。全時点でのサブマップが連合されてマップを生成する。また、マップを使用する定位方法も提供される。
(もっと読む)
歩行者安全対応器
【課題】 歩行者と、前方又は後方から歩行者に接近してくる自転車との間の距離を定期的に測定し、自転車と歩行者との距離が予め定めた距離内に入ったとき、歩行者に警報を発して歩行者の傷害事故を防ぐことを可能とする機器を提供するものである。
【解決手段】 本発明の歩行者安全対応器は、赤外線発信器と赤外線受信器により歩行者とこの歩行者に接近してくる自転車との距離を定期的に検知し、その距離dが予め定めた許容距離Dよりも小さな値となったとき、警報機構が作動して音あるいは点滅光を発し、歩行者に注意喚起を行うことを可能としたものである。
(もっと読む)
光電センサ
【課題】不感帯の大きさを調整して、レンズ近傍での物体検出又はレンズから離れた位置での物体検出ができる光電センサを提供する。
【解決手段】投光レンズ12の光軸12aを、投光素子11の発光面の中心11aより受光素子13側にずらして配置し、投光領域Aを受光レンズ14側に広くすると共に、受光レンズ14の光軸14aを、受光素子13の感光面の中心13aより投光素子11側にずらして配置し、受光視野Bを投光レンズ12側に広くして、不感帯Cを小さくする。
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、レーザスキャナ(10)の環境のカラー画像を撮影するカラーカメラ(23)と、多数の測定点(X)について、物体(O)までの距離を求め、この距離をカラー画像と連係させる制御評価ユニット(22)とを含む装置において、カラーカメラ(23)は、受光レンズ(30)の光軸(A)上に配置される。 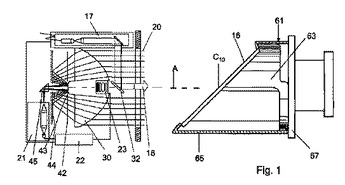 (もっと読む)
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
光検出装置及び電子機器
【課題】誤検知を起こすおそれが低い高性能の光検出装置を提供する。
【解決手段】本発明に係る光検出装置1は、供給される電流に応じた強度の光を出射するLED2と、LED2が出射した光であって、被照射物により反射された光を受光するフォトダイオード3と、フォトダイオード3が受光した光の量が予め設定された設定値と同一になるか又は当該設定値を越した場合に、LED2からフォトダイオード3までの光の経路の途中に被検出物が存在すると認定し、フォトダイオード3が受光した光の量が当該設定値未満である場合に、LED2からフォトダイオード3までの光の経路の途中に被検出物が存在しないと認定する、認定部21と、被検出物が存在しないと認定部21が認定した場合に、LED2に供給される電流の値を当該電流の値よりも大きい値に変更するスキャン処理を行う処理部22と、を備えている。
(もっと読む)
小型マルチスペクトル走査システム
本発明は、主ミラー(1)および副ミラー(2)を備える小型マルチスペクトル走査システムに関連し、これらのミラーは互いに向かい合い、反対方向に同じ角速度で回転されるように適合され、それらの回転軸に対して傾けられる。主ミラーは凹形であり、副ミラーは主ミラーよりも小さく、両ミラーの回転軸は位置合わせされる。この構成により、システムは先行技術のデバイスよりも小型になり、システムが動作周波数に依存することが回避される。 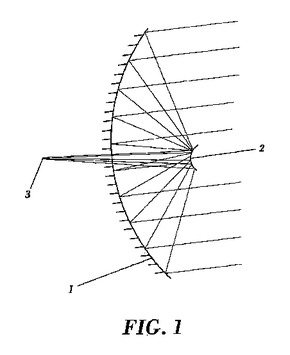 (もっと読む)
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
ビーム照射装置
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
障害物検知方法及び装置
【課題】レーザ光の投光範囲に雪、砂埃、水蒸気、落葉等の異物が存在する場合であっても、投光距離が遠い部分の障害物の検知漏れを抑制しつつ、投光距離が近い部分の誤検知を抑制し、障害物の検知精度を向上することができる障害物検知方法及び装置を提供する。
【解決手段】本発明の障害物検知装置は、投光部1と、受光部2と、信号処理部3と、障害物検知部4と、を有し、障害物検知部4における近接範囲Cは、計測点Pの計測距離の遠い側から近い側に向かって小さくなるように設定されており、障害物検知部4における個数は、計測点Pの計測距離の遠い側から近い側に向かって多くなるように設定されている。
(もっと読む)
環境認識装置及びそれを備えた移動体
【課題】移動体の移動可能領域を適切に検出する。
【解決手段】移動体は、構造物までの距離を計測する距離計測センサ38と、距離計測センサの3次元位置を計測するセンサ位置計測装置18a,18bを備えている。制御装置20は、距離計測センサ38の計測結果とセンサ位置計測装置18a,18bの計測結果を用いて、計測された構造物の3次元位置を算出する。そして、算出された構造物の3次元位置と尤度マップを用いて、その算出された3次元位置に対応するマップ上の計測点における構造物の情報と尤度をマップに登録又は更新すると共に、その計測点の近傍の非計測点における構造物の情報と尤度をマップに登録又は更新する。
(もっと読む)
空間情報検出装置
【課題】環境光や周囲光の影響を受けることなく物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
物体検出装置および電子機器
【課題】被検出物からの反射光の検知感度を下げることなく、被検出物以外からの反射光による誤検知を防止する。
【解決手段】受光手段が、第1の受光素子201、第2の受光素子202、および第3の受光素子203によって構成される。被検出物以外からの反射光スポット131は、第2の受光素子202側にずれて形成されるため、第1の受光素子201の出力から第2の受光素子202の出力を減算することで誤検知を防止する。被検出物からの反射光スポット130については、さらに第3の受光素子203の出力を加算することで第2の受光素子202の検出成分をキャンセルする。
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
情報処理装置および物体検出方法
【課題】1組の発光素子および受光素子で、物体の存在有無に加えて、物体の距離を検出することを実現した情報処理装置を提供する。
【解決手段】近接センサ25は、1組みの発光素子251および受光素子252によって構成される。レギュレータ25Aは、制御信号に基づき、発光素子251に供給される駆動電力の電圧値を制御する。このレギュレータ25Aを介して、発光素子251の発光光量を所定の周期内において時分割で多段階に切り替え、この切り替えと同期を取って、この所定の周期内における受光素子252による反射光の受光状況を当該受光素子252が出力する検出信号を監視することにより検出し、その検出結果に基づき、物体の存在有無に加えて、物体の距離を多段階に検出する。
(もっと読む)
101 - 120 / 310
[ Back to top ]