
Fターム[5J084AA01]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 存在検知 (455)
Fターム[5J084AA01]の下位に属するFターム
特に動く物体の存在検知 (112)
特に静止物体の存在検知 (33)
Fターム[5J084AA01]に分類される特許
61 - 80 / 310
物体検出装置および情報取得装置
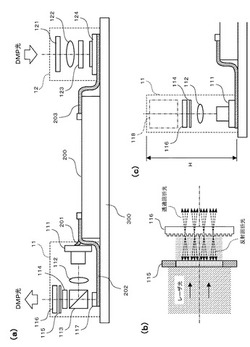
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
光位相差検出式の物体検知センサ

【課題】
電気回路の温度ドリフト等による距離測定値が変動を補正し、数センチ単位の距離変動を検出することのできる光位相差検出式の物体検知センサを提供すること。
【解決手段】
検知領域に向けて検出光を投光する投光素子と、検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、検知領域内に物体が有ると判定する判定手段を備えた光位相差検出式の物体検知センサに、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段を加え、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正を実行させるようにした。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から得られるランレングス度数分布と幾何分布との一致度から、入力信号が有効か否かを判定する有効性判定部103とを備える。有効性判定部103は、ランレングスを測定するサンプリングクロックの判定期間中の総数をNsampとしたとき、判定期間中の総度数とNsamp/2との比、あるいは判定期間中の階級値1の度数とNsamp/4との比により、入力信号が有効か否かを判定する。
(もっと読む)
障害物検知装置及びプログラム
【課題】障害物を精度良く検知することができる障害物検知装置及びプログラムを提供する。
【解決手段】本発明に係る障害物検知装置は、乗り物から測定対象物までの距離を複数の測定点それぞれについて取得する距離取得手段と、前記距離取得手段が取得した各距離のうち、前記乗り物の形状に対応した位置にある1以上の測定点における距離に基づいて、所定の距離内における障害物の有無を検知する検知手段と、を備える。そして、検知手段は、前記1以上の測定点における距離のうち、前記所定の距離よりも近い距離が所定の数以上あった場合に、前記所定の距離内に前記障害物が存在することを検知する。
(もっと読む)
物体検出装置
【課題】監視領域がレーザレーダの近辺から遠方まで広く分布する場合であっても、監視領域の物体を正確に検出する。
【解決手段】走査光LB1の主走査方向Xにおいてレーザレーダヘッド5からの距離が遠い監視領域では、反射光LB2の拡散の度合いが大きく、反射光LB2の強度が弱くなる。そこで、主走査方向Xにおいてレーザレーダヘッド5から遠い監視領域に照射した走査光LB1の反射光LB2の方が、近い監視領域に照射した走査光LB1の反射光LB2よりも、ポリゴンミラー11で受光ユニット2に向けて反射された後の光束幅が大きくなるように、ポリゴンミラー11と受光ユニット2とを配置する。これにより、主走査方向Xにおいてレーザレーダヘッド5から遠い監視領域に照射した走査光LB1の反射光LB2の強度が強くなるようにしても、レーザレーダヘッド5から近い監視領域に照射した走査光LB1の反射光LB2の強度は過剰に強くならない。
(もっと読む)
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
ビーム照射装置
【課題】光検出器からの信号に基づいて検出されたサーボ光の受光位置と理想の受光位置との差分に、迷光や電気的ノイズ等による外乱成分が含まれる場合にも、適正に、レーザ光を目標領域において走査させ得るビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315からの検出信号に基づいて取得されたサーボ光の受光位置と、理想の受光位置との差分を示す差分信号に基づいて、レーザ光が目標領域上の目標軌道を追従するよう、ミラーアクチュエータ100を制御する。また、マイコン7は、差分信号に外乱成分が含まれるエラー期間を検出し、検出したエラー期間において、差分信号に応じて前記レーザ光を前記目標軌道に追従させる制御を停止させる。
(もっと読む)
ビーム照射装置
【課題】ミラーを原点位置に迅速かつ円滑に位置づけることができるビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315上におけるサーボ光の受光位置と原点位置とを繋ぐ軌道を設定し、サーボ光の受光位置がこの軌道を追従して原点位置に至るよう、ミラーアクチュエータ100を制御する。具体的には、マイコン7は、前記軌道上に、制御タイミング毎の理想の受光位置を設定し、各制御タイミングにおけるサーボ光の受光位置と理想の受光位置との差分に基づいて、サーボ光が前記軌道を追従するように、ミラーアクチュエータ100を制御する。
(もっと読む)
捜索セット
【課題】載置場所を円滑に探し出すことができる捜索セットを提供すること。
【解決手段】本発明では、使用者が捜索具を用いて載置場所を捜し出すための捜索セットにおいて、発信部と受信部とを有する捜索具と、発信部と受信部と制御部とを収容したケーシングとからなり、ケーシングは、捜索具から発せられた信号を受信する受信部と、捜索具から発せられた信号よりも到達距離が短い微弱な信号を発信する発信部と、受信部で信号を受信した場合に発信部から所定の信号を発信するように制御する制御部とを収容し、捜索具は、所定の信号を発信する発信部と、ケーシングに収容した発信部から発せられた信号を受信する受信部と、受信部で信号を受信した場合に報知をする報知部とを有することにした。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得るうえ、計測点データの抜けが生じても走行可能領域を正しく評価し得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11を用いて取得した移動ロボットRの前方側プロファイルデータの幾何的特徴量からマルコフ連鎖モンテカルロ法による領域の分割を行い、プロファイルデータを構成する計測点データ間における移動ロボットの進行するx方向と直交するy方向の間隔が閾値を超える部位が存在する場合には、閾値を超える部位を境にして領域を分割し、分割後の領域内の計測点データから勾配や表面粗さなどの幾何的特徴量を評価して、分割した領域を走行可能領域及び走行不能領域に区分けする。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して所定領域内の物体を特定する手段とを備える、車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、対応画像上の所定物体に対する所定領域の位置ずれ方向が常に同一方向である場合にレーダまたはカメラの光軸ずれがあると判断し、所定領域の位置ずれ方向が所定物体の移動方向と逆方向である場合にレーダとカメラの同期ずれがあると判断する判断手段と、を有する。
(もっと読む)
物体認識装置、及びプログラム
【課題】物体認識装置において、複数個の検出対象が走査方向に沿って近接している場合であっても、各検出対象の認識精度を向上させること
【解決手段】物体認識処理では、測距データ間の差が予め規定された許容値以下となる測距データによって形成される領域に含まれる測距データ群を、一つの候補領域をグループ化する(S130)。当該候補領域の大きさが規定値より大きければ(S150:YES)、当該候補領域を特別候補領域として、この特別候補領域に対応する画像データ上の対象領域に対して画像認識処理を実行し、対象領域中の検出対象の範囲を特定する(S170)。その特定した範囲に基づく検出対象の境界方位に従って、特別候補領域を分割し(S210)、その分割した新たな候補領域を含む全ての候補領域について追跡処理を実行して、候補領域の中で物体として確定すべきものと特定する(S230)。
(もっと読む)
レーザスキャナ
【課題】簡単、軽量な構造で、マルチビームを用いたレーザスキャナを提供する。
【解決手段】パルスビーム12を全周走査するレーザスキャナ1に於いて、該レーザスキャナが本体部3と該本体部に回転可能に設けられた回動部4とを有し、該回動部がパルスビームを該回動部の中心軸に対して垂直方向に偏向して照射する偏向部材15を具備し、前記本体部は、2次元的に配置され、複数のパルスビームを発する複数の発光源11と、パルスビームを投光、受光する光学系6と、前記回動部の水平回転角を検出する回転角検出部19と、対象物からの反射光12′を前記偏向部材を介して受光し、前記発光源とそれぞれ共役の位置にある複数の受光部18と、該受光部からの受光信号に基づき測距を行う測距部9と、前記発光源の配置位置、前記回転角検出部の検出結果に基づき前記偏向部材から照射されるパルスビームの照射方向を演算する制御演算部10とを具備した。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
移動体
【課題】外部に補正用の基準部材を設置することなく、物体の位置を測定するセンサの取り付け角度ずれに起因する誤差を補正することが可能な移動体を提供する。
【解決手段】車体11に搭載され、走行上計測を必要とする物体が存在する第1の領域及びその他の第2の領域を計測領域とし、物体の位置を計測するセンサ12と、車体11に設けられ、第2の領域の予め決められた位置に配置された基準部材13と、センサ12が計測した基準部材13の位置と予め決められた位置とに基づいて、センサ12の取り付け角度ずれに起因する誤差を補正する補正部22を有し、車体11の移動を制御する制御装置14とを備える。
(もっと読む)
車両の周辺監視装置
【課題】物体位置特定手段と撮像手段とにおける光軸ずれ量を算出する手段を提供。
【解決手段】レーザレーダ10と、車両の周辺の画像を撮像する撮像手段12と、画像処理ユニット14から構成される。物体位置特定手段141は、レーザレーダ10からの信号により物体の位置を特定する。画像取得手段142は、赤外線カメラ12が撮影した画像をグレースケール画像として取得する。画像上の物体特定手段143は、物体位置特定手段141が特定した物体位置に対応する物体を、グレースケール上で特定する。
この情報に基づいて、光軸ずれを算出する。
(もっと読む)
光レーダ装置
【課題】構造を複雑化させることなく、回転駆動されるポリゴンミラーの回転中心軸方向における所望の角度でレーザ光を照射させることが可能な光レーダ装置を提供する。
【解決手段】ポリゴンミラー42を設置している設置プレート46の傾き角度を変化させる角度調整機構52、及びポリゴンミラー42を回転駆動するモータ44から角度調整機構52への駆動力の伝達、非伝達を切り替えるクラッチ機構50を設けた。これにより、設置プレート46の傾き角度を変化させるための専用の駆動源を設けることなく、設置プレートの傾き角度を変化させることができ、それにより、垂直方向における検出エリアの位置を調整することができる。
(もっと読む)
電子機器、閾値調整方法及びプログラム
【課題】ユーザの接近を検出するセンサを搭載した電子機器の省電力機能において、在席離席判定に用いる閾値をユーザの状態に応じて自動的に調整して設定できるようにする。
【解決手段】電子機器は、対象物に向けて光を発射し反射した光の受光量を検出する光検出手段と、光検出手段による検出結果及び所定の閾値に基づいて、ユーザが電子機器の位置から所定の範囲に存在するか否かを判定する存在判定手段と、存在判定手段による判定結果に基づいて、標準モードと省電力モードとの切り替えを行う省電力制御手段と、ユーザが電子機器の位置から所定の範囲に存在している状況における検出結果に基づいて、所定の閾値を更新する閾値更新手段と、を有する。
(もっと読む)
61 - 80 / 310
[ Back to top ]