
Fターム[5J084AA01]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 存在検知 (455)
Fターム[5J084AA01]の下位に属するFターム
特に動く物体の存在検知 (112)
特に静止物体の存在検知 (33)
Fターム[5J084AA01]に分類される特許
161 - 180 / 310
光測距装置
【課題】測定値のばらつきによる影響を抑制し、測定精度を高めることが可能な光測距装置を提供する。
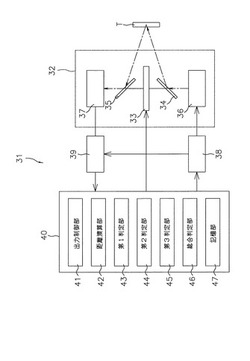
【解決手段】障害物センサ31は、2つの異なる周波数の変調光を交互に出射するように投光素子36を制御する出力制御部41と、受光素子37において受光された変調光に基づいて被投射体Tまでの測定距離を演算する距離演算部42と、2回の第1周波数の変調光によって演算された測定距離の差が、第1所定範囲内にあるかを判定する第1判定部43と、2回の第2周波数の変調光によって演算された測定距離の差が、第2所定範囲内にあるかを判定する第2判定部44と、第1判定部43と第2判定部44との判定結果に基づいて距離演算部42によって演算された測定距離の正誤を判定する総合判定部46とを備えている。
(もっと読む)
赤外線撮像装置および赤外線撮像方法

【課題】監視領域内の全体像と共に、所望の距離に存在する対象物の画像を選択的に撮像する。
【解決手段】監視領域内に存在する物体から発せられる赤外線を第1の検知素子131で受光し、この赤外線を光電変換して電気信号を出力する第1の赤外線検知器13と、この電気信号を変換し、赤外線受光画像用信号を生成する第1の信号処理器15Aと、第1の赤外線検知器13に係る赤外線と異なる波長の赤外パルスレーザ光を生成し、監視領域内へ照射するレーザ照射器12と、物体から赤外パルスレーザ光の反射光を第2の検知素子141で逐次受光し、この反射光を光電変換して電気信号を出力する第2の赤外線検知器14と、この電気信号を変換し、赤外線反射画像用信号を生成する第2の信号処理器15Bと、を備え、複数の第1の検知素子131および第2の検知素子141は外表面に市松状で配置されている。
(もっと読む)
赤外線撮像装置および赤外線撮像方法
【課題】異なる距離にある対象物を同時に撮像する。
【解決手段】所定波長の第1の赤外パルスレーザ光を生成し、監視領域内へ照射する第1のレーザ照射器12Aと、第1の赤外パルスレーザ光の反射光を第1の検知素子131で逐次受光し、光電変換して電気信号を出力する第1の赤外線検知器13と、この電気信号から第1の赤外線反射画像用信号を生成する第1の信号処理器15Aと、第1の赤外パルスレーザ光と異なる波長の第2の赤外パルスレーザ光を生成し、監視領域内へ照射するレーザ照射器12Bと、第2の赤外パルスレーザ光の反射光を第2の検知素子141で逐次受光し、光電変換して電気信号を出力する第2の赤外線検知器14と、この電気信号から第2の赤外線反射画像用信号を生成する第2の信号処理器15Bを備え、第1の検知素子131と第2の検知素子141が外表面上に市松状で配置された赤外線撮像装置。
(もっと読む)
自動ドア用安全装置
【課題】距離画像センサユニットを用いて鉛直方向での面検知を行い、所定の検知エリアでの支障物を精度良く検知してドア部の接触部分での支障物の挟み込みを確実に防止することのできる自動ドア用安全装置を提供する。
【解決手段】プラットホーム用可動安全柵11の戸袋12の下方に自動ドア用安全装置10の鉛直方向距離画像センサユニット22を配置する。自動ドア用安全装置10は、ドア部13付近で略鉛直方向にレーザー光23aを照射し、ドア部13に平行な検知エリア16(17)で面検知を行い、扇形エリア内に支障物があるときこの支障物までの距離情報を含む距離画像を生成する少なくとも1つの鉛直方向距離画像センサユニット22と、距離画像センサユニット22により生成された距離画像に基づいて、扇形エリア内の前記支障物の存在の有無を判定する判定手段27を備えている。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、システムを較正すべく、投射光パルスを既知の角度方向にかつ既知の距離に配置された較正要素に指向させる手段(26)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
光測距装置
【課題】配線構造を簡略化し、容易に組み立てることが可能な光測距装置を提供する。
【解決手段】障害物センサ30は、投光素子34、受光素子36、投光ミラー41、受光ミラー42、回転ユニット40および演算部60を備えている。受光素子36は、投光素子34と投受光方向が一致するように対向して配置され、投光ミラー41は、投光素子34からの光を回転ユニット40における半径方向外側にある被投射体に向け、受光ミラー42は、被投射体からの反射光を受光素子36に向け、回転ユニット40は、投光ミラー41と受光ミラー42とを回転駆動させ、投光素子34と投光ミラー41との間または受光素子36と受光ミラー42との間に配置された中空形状の回転軸40hを有し、演算部60は、受光素子36に受光された反射光に基づいて、被投射体までの距離を演算する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像ごとにオブジェクトを検出し、オブジェクトの輝度に基づいて、前記オブジェクトまでの距離を表す距離画像データを生成する画像処理部10を備えた。
(もっと読む)
車載用物体検知装置
【課題】画像処理の負荷低減と非立体物への誤検知低減を両立する車載用物体検知装置を提供する。
【解決手段】自車70から物体Pまでの距離と自車70の前方画像60に基づいて処理候補Qを選定する。そして、その選定した処理候補Qの距離と前方画像60とに基づいて処理候補Qが予め設定された所定の立体物P1であるかを判定する。これにより、処理負荷の大きい立体物P1を判定するための処理の実行回数を減らし、装置3の処理負荷を低減する。そして、高精度の画像を画像処理することによって立体物P1を判定し、誤検知を低減する。
(もっと読む)
光走査型光電スイッチ
【課題】保護領域の設定等、光走査型光電スイッチの種々の設定が簡便に行える光走査型光電スイッチを提供する。
【解決手段】接続される機器の動作許可/動作不許可を示す安全信号を出力する光走査型光電スイッチに関する。光走査型光電スイッチの安全機能の状態および故障状態の情報の内の少なくとも1つの情報を表示する表示画面を有する表示部38aと、前記表示部38aの近傍に設けられ、表示部38aの表示内容を安全信号、判別結果、光走査型光電スイッチの設定内容、光走査型光電スイッチの安全機能の状態および故障状態の情報の内の1つの情報から他の前記情報に変更するための操作部39とを備えている。
(もっと読む)
光走査型光電スイッチ
【課題】不慣れな者でも確実にカバーを取り付けることのできる光走査型光電スイッチを提供する。
【解決手段】光走査手段及び光電変換素子を収容し、軸線に直交する断面が略U字状の開口が形成された筐体1と、筐体1に対し取り付け取り外し可能に設けられ、筐体1の開口を覆うためのカバー4と、筐体1とカバー4との間に設けられる弾性変形可能なシール部材6とを備え、カバー4を筐体1に取り付ける取付方向Fにシール部材6を圧縮した状態でカバー4が筐体1に係合するためにカバー4および筐体1に形成された係合手段41,62と、カバー4が筐体1に係合した状態で取付方向Fとは異なる方向Sにシール部材6を圧縮する固定具40を受け入れ可能に形成された固定部43とを備えている。。
(もっと読む)
障害物検出装置
【課題】移動体にピッチ角変化が生じても、障害物検知の範囲が適切に確保できる障害物検出を提供する。
【解決手段】車両1の走行方向X前方に向けて電磁波を照射すると共にその電磁波によるスキャン範囲を上下方向に設定した照射手段を、車幅方向左右に離して2つ設ける。その2つの照射手段からの照射方向2Gを、上記走行方向X前方で交差するように設定する。そして、照射した電磁波の障害物からの反射波に基づき障害物を検出する。
(もっと読む)
光走査型光電スイッチ
【課題】小型化と共に、取り付け位置の制約を改善し得る光走査型光電スイッチを提供する。
【解決手段】外部へ信号生成手段で生成された信号を出力すると共に電源ラインを含む第1コネクタ5を備え、第1コネクタ5に接続される第2コネクタ付のケーブルの第2コネクタを受け入れ可能な凹所15が筐体1に形成され、第2コネクタ付のケーブルのケーブル部分を受け入れ可能な第1および第2溝61,62が筐体1に形成され、凹所15および各溝は第2面E2から軸線方向Zに向って後退しており、凹所15および第1溝61は光学素子の配列に沿った外縁Eeから筐体1の内方に向って後退しており、第2溝62は第1面E1から筐体1の内方に向って後退しており、凹所15が第1溝61を介して第2溝62に連なっていることを特徴とする。
(もっと読む)
撮像システム
【課題】ノイズを抑制しながら、十分な明るさの画像を得ること。
【解決手段】パルス状の光を射出する送光部11と、受光部12と、受光部12から出力される画像信号をフレーム期間に渡って蓄積し、蓄積した複数の画像信号を重畳した重畳信号を出力する画像処理装置25と、前記重畳信号を画像として表示する表示装置4と、カメラヘッド123のゲイン及び送光部11から射出されるレーザ光のパルス周波数を予め設定されているそれぞれの許容範囲内で調整することで、表示装置4に表示された画像の明るさを調整する制御装置3とを具備する撮像システムを提供する。
(もっと読む)
反射型光電スイッチおよび物体検出方法
【課題】自己結合型のレーザ計測器を利用して、簡単かつ安価な構成で精度の良い反射型光電スイッチを実現する。
【解決手段】反射型光電スイッチは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段(フォトダイオード2、電流−電圧変換増幅部5)と、物体10が基準距離の位置にあるときの干渉波形の周期を基準周期としたときに、干渉波形の周期の度数を基準周期に基づく値で分別する周期分別部7と、周期分別部7の測定結果から物体10が基準距離よりも近距離にあるか遠距離にあるかを判定する判定部8とを有する。
(もっと読む)
監視装置
【課題】監視対象だけでなく、その周辺の様子も監視することの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が監視対象に到達し、監視対象により反射された反射光が到達するタイミングに合わせて高速ゲート装置122を開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、奥行き方向における前記監視対象の前後の情報を取得するタイミングで高速ゲート装置122を開閉させる監視付随制御を行う監視装置を提供する。
(もっと読む)
光検出装置
【課題】より高精度の物体検出をすることができるレーダ装置において好適に用いられ得る光検出装置を提供する。
【解決手段】光検出装置1は、M個の受光部101〜10M,選択部20,加算部30および制御部40を備える。各受光部10mは、フォトダイオードPD,トランスインピーダンスアンプ11,トランスコンダクタンスアンプ12,容量素子C,第1スイッチSW1および第2スイッチSW2を含む。トランスインピーダンスアンプ11はアンプA11および帰還抵抗器R11を有する。第1スイッチSW1は、トランスインピーダンスアンプ11の接地端子と第1接地用共通配線W1との間に設けられる。第2スイッチSW2は、トランスインピーダンスアンプ11の接地端子と第2接地用共通配線W2との間に設けられる。
(もっと読む)
反射型光電スイッチおよび物体検出方法
【課題】自己結合型のレーザ計測器を利用して、簡単かつ安価な構成で精度の良い反射型光電スイッチを実現する。
【解決手段】反射型光電スイッチは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段(フォトダイオード2、電流−電圧変換増幅部5)と、干渉波形の情報から、物体10までの距離が基準距離より遠いか近いかを判定する距離判定処理手段(フィルタ部6、計数部7、判定部8)とを備える。
(もっと読む)
車両周囲環境検出装置
【課題】レーダを用いて物体の属性を高い精度で判別する。
【解決手段】車両は、レーザの反射信号を受光して、車両周囲の物体を検出するレーザレーダ1と、レーザレーダ1が検出した物体の動きを検出する動き検出機能、レーザレーダ1における受光状態を検出する受信状態検出機能、並びにそれら検出した物体の動き及び受光状態を基に、レーザレーダ1が検出した物体が人間で確度を算出する確度算出機能を有する外界認識装置5を備える。
(もっと読む)
161 - 180 / 310
[ Back to top ]