
Fターム[5J084AA01]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 存在検知 (455)
Fターム[5J084AA01]の下位に属するFターム
特に動く物体の存在検知 (112)
特に静止物体の存在検知 (33)
Fターム[5J084AA01]に分類される特許
81 - 100 / 310
物理情報取得装置、固体撮像装置、物理情報取得方法
【課題】別光源から発せられた光に由来する情報を取得する際に、通常光源に起因する外乱ノイズの影響を緩和する。
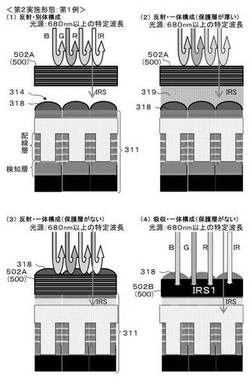
【解決手段】電磁波エネルギレベルが他の波長よりも低い特定波長と対応した波長の特定波長波を物体に照射し、物体で反射した特定波長波を固体撮像素子314で検知し、得られた検知情報に基づき特定波長波に由来する情報を取得する。特定波長を中心とする狭帯域のバンドパス特性を持つ光学バンドパスフィルタ502を撮像光学経路上に配置する。特定波長波の物体反射光を検知すれば特定波長成分が通常光源の成分に埋もれずに検知される。特定波長波を物体に照射したときとしないときの各検知情報を比較して通常光源に起因する外乱ノイズの影響が緩和された特定波長波に由来する情報を取得する。光学バンドパスフィルタ502を併用すれば、特定波長成分だけを検知でき、通常光源の光量が強い場合でもその影響を受けず、飽和の問題を回避できる。
(もっと読む)
光学式センサ汚損防止装置

【課題】汚れ防止のために光学式センサの前方に発生させるガスの流量を、汚損物サイズに応じて変化させることが可能な光学式センサ汚損防止装置を提供すること。
【解決手段】光学式センサ10の前方にガス流SBを発生させるガス流発生手段30を備える構成とし、光学式センサ10の前方を飛来する汚損物Pの大きさを検出する汚損物サイズ検出手段10を設ける。検出された汚損物Pの大きさに応じて、ガス流発生手段30によるガス流SBの流量を変化させるガス量調節手段20,30を備える構成とする。そして、汚損物Pのサイズが大きい場合に、ガス流SBの流量を増加することで、汚損物Pが光学式センサ10に付着することを防止する。
(もっと読む)
物体検出装置
【課題】 本願は、物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】 本願の物体検出装置10は、2次元走査型の距離計測センサ12と、距離計測センサの出力に基づいて物体を検出する演算装置と、を備えている。距離計測センサ12は、計測対象となる物体36に応じて設定された測定高さH0より低い位置HLに設置されている。また、距離計測センサ12は、距離計測センサ12がセンサ正面を計測するときの距離計測方向θが水平面Pに対して斜め上方を向くように設置されている。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
遠隔監視システム
【課題】監視領域と監視室とが離れている場合であっても、低コストで監視業務を効率化することができ、障害物の内容や障害物検知装置の異常を的確に把握することができる遠隔監視システムを提供する。
【解決手段】レーザ光Lを照射して計測データDを出力する計測手段1と、障害物を検出する障害物検出手段2と、障害物検出時に警報信号を出力する出力手段3と、計測データDを単位時間Δt毎に区切った計測データファイルFを作成する計測データ処理手段4と、計測データファイルFを保存する記憶手段5と、計測データファイルFを出力手段3に伝送する通信手段6と、を備え、計測データ処理手段4は、障害物が検出された場合に障害物検出時tnの計測データDを含む計測データファイルFnを抽出して伝送する。
(もっと読む)
警備システム
【課題】変化する監視エリアに対応しつつ、監視エリアの縮小を招くことなく誤検出を回避する警備システムを提供する。
【解決手段】処理部22は、角度範囲Snごとに定期的に取得される距離データLnを、1日以上の期間的な範囲で記憶部28に蓄積する。処理部22は、蓄積された距離データLnから仮平均値Lnaおよび標準偏差σを算出し、標準偏差が±1σの範囲に含まれる偏差内距離データLnxを抽出するとともに、その範囲外の偏差外距離データLneを蓄積の対象から除外する。処理部22は、偏差内距離データLnxから真平均値Lnarおよび真標準偏差σrを算出し、真平均値Lnarから真標準偏差σrを減じることにより、その角度範囲Snにおける更新済距離データLnrを算出する。そして、処理部22は、この更新済距離データLnrを、更新済監視エリアArの外縁までの距離に設定する。
(もっと読む)
異物検出装置
【課題】同一捜索時間における異物の3次元形状の検出精度を向上できる異物検出装置を得る。
【解決手段】捜索対象にレーザ光を照射したときの散乱光を用いて異物を検出する異物検出装置であって、レーザ光を出力する光出力手段と、レーザ光を用いて捜索対象の捜索範囲を走査するスキャナ11と、捜索対象からの散乱光を受光する光受信機13と、レーザ光と散乱光の位相差及び散乱光の受信強度を検出する位相検波器14と、これらの検出結果に基づいて捜索範囲を絞り込んで着目領域23を抽出し、スキャンする走査線間隔を狭くしてスキャナ11に着目領域23を再走査させる制御信号を出力し、この着目領域23における位相検波器14の検出結果に基づいて3次元画像を生成するパソコン3とを備える。
(もっと読む)
レーザセンサ装置
【課題】簡単な構成で、装置の姿勢変化を検出できるようにする。
【解決手段】装置本体ケース2には、侵入検出用レーザ照射口11の反対側にレーザ通過口12が形成されている。建物の壁14におけるレーザ通過口12と対向する部位には姿勢変化検出用シール3が装着される。レーザ照射部5から照射されたレーザ光は、回転ミラーで展開され、レーザ通過口12を通してシール3をスキャンしてレーザ受光部6により受光される。制御装置10は、レーザ通過口12を通して戻ってくるレーザ光がレーザ受光部6で受光されると、このレーザ受光パターンを当該展開周回とこれ以前での展開周回とで比較し、同じであれば姿勢変化無しと判断し、異なれば姿勢変化有りと判断する。
(もっと読む)
対象物検出装置
【課題】対象物か否かを判断する情報を残しながらも情報量を低減させ、距離画像を用いた対象物の検出における処理負荷を従来よりも低減する。
【解決手段】アクティブ型の距離画像センサ1により距離画像を生成する。背景取得手段2は背景距離画像を記憶し、差分画像生成手段3は、距離画像と背景距離画像とから距離差分画像を生成する。注目画素抽出手段4は、距離差分画像における画素値が存在閾値以上である画素を距離画像から注目画素として抽出し、密度計測手段5では、注目画素を3次元の仮想空間にマッピングし単位体積のブロックごとに注目画素の個数を密度として求める。有効ブロック抽出手段6は、密度が対象閾値以上であるブロックを有効ブロックとして抽出し、領域統合手段7は、隣接する有効ブロックを統合してグループを形成する。対象物判別手段8は、グループのサイズが適正範囲であれば、対象物として判別する。
(もっと読む)
無人搬送車
【課題】光軸調整を容易に行うこと。
【解決手段】複数の反射部17a〜17eを左右方向に段状に配置してなる検査用の反射板17に対して発光させる。そして、反射光を受光することにより、何れの反射部17a〜17eからの反射光であるかを特定する。そして、その結果を、発光部の光軸を調整するための指標となる光軸調整情報として表示部16aに表示させる。表示部16aには、反射した反射部17a〜17eに対応するシンボルHa〜Heが点灯した状態で表示されるので、その表示内容から光軸調整の有無及び調整量を認識できる。
(もっと読む)
三次元測距装置及び移動ロボット
【課題】小型化及び移動ロボットに容易に搭載可能な三次元測距装置を提供する。
【解決手段】三次元測距装置1は、光学部20と信号処理部30を備える。光学部20は、レーザ光を受光及び発光するレーザ受発光部2と、複数のミラー面を有し、レーザ受発光部2から発光するレーザ光の光軸と直交する軸C1を回転軸として回転駆動され、レーザ受発光部2から照射されたレーザ光をミラー面で反射して対象物に照射すると共に、対象物から反射されたレーザ光を反射してレーザ受発光部2に導くポリゴンミラー3と、を有する。信号処理部30は、ポリゴンミラー3の回転制御とレーザ受発光部2からのレーザ光の照射タイミングの制御を行うと共に、レーザ光の受光タイミングから対象物までの距離情報を演算する。光学部20は、回転軸C1に直交する軸を回転軸C2として、外部駆動装置を用いて揺動又は回転動作される。
(もっと読む)
シールドとレンズが改良された光学式近接センサ
【課題】シールドとレンズが改良された光学式近接センサを提供する。
【解決手段】下にある発光体16及び光検出器12のアセンブリに対して迅速にかつ正確に位置合わせ及び位置決めされうる光シールド18を備えた光センサ10。光学式近接センサによって放射されまた受け取られる光を効率的に平行化し、かつクロストークを減少させるレンズ配列を備える。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、レーザ光を前記目標領域に向けて投射する投射光学系10と、前記目標領域からの反射光を受光して信号を出力するCMOSイメージセンサ125とを有する。レーザ光が出射されたときにCMOSイメージセンサ125から出力される第1の撮像データから、レーザ光が出射されていないときにCMOSイメージセンサ125から出力される第2の撮像データが減算され、減算結果が、メモリ25に記憶される。3次元距離演算部21cは、メモリ25に記憶された減算結果に基づいて、3次元距離情報を演算し取得する。
(もっと読む)
距離測定装置
【課題】測距対象物の誤認識を防止することができる距離測定装置を提供する。
【解決手段】距離測定装置10は、垂直方向に隣接する計測点までの水平方向の距離差が閾値より小さい場合に、所定の高さを有する測距対象物が存在すると判定する距離測定装置において、任意の測定点に対して距離を測定する測距部1と、測距部1による測定誤差、及び計測点の候補を記憶する記憶部2と、記憶部2により記憶された計測点の候補の中から、記憶部2により記憶された測定誤差による距離差の最大値よりも閾値の方が大きくなるものを計測点として選択決定する選択部3と、を備える。これにより、所望の測距対象物であっても測定誤差のために測距対象として判定されず誤認識してしまうことを防止することが可能になる。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
物体識別方法及び物体識別装置
【課題】反射物体が存在する場所においても、物体の誤認識を抑制することができる物体識別方法及び物体識別装置を提供する。
【解決手段】物体識別装置1は、車両前方の物体にレーザ光を照射し物体からのレーザ光の反射状態によって物体との距離を測定するレーザ装置3と、少なくとも上記レーザ光の波長帯域の光を受光させるフィルタ部5aを備えたカメラ5と、レーザ装置3で対象物との距離を測定すると共に、レーザ装置3のレーザ光の照射方向に撮像方向を略一致させてカメラ5で撮像を行い、カメラ5がレーザ光の照射軌跡を認識した場合には、レーザ装置3で測定された対象物との距離値を無効にする。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
三次元画像を形成するための識別専用オプトロニックシステムおよび方法
【課題】三次元画像を形成するための識別専用オプトロニックシステム及び方法を提供する。
【解決手段】光センサと、通信手段21、22と、コンピュータ処理手段1とを含み、センサが捕捉した画像から三次元の物体を再構成し、当該再構成に基づいて物体を識別可能にする、物体を識別するためのオプトロニックシステムであって、光センサが、物体5周囲の何通りかの観測角61、62で捕捉された、物体5の表面で反射される電磁放射の輝度レベルを表す物体の画像を記録でき、通信手段21、22が、物体表面で反射される電磁放射の輝度レベルを表す前記物体の画像を処理すべく構成された断層撮影機能によって、三次元で物体を再構成できるよう、前記画像をコンピュータ処理手段1に送信できる。
(もっと読む)
センサ機構
【課題】
遮断手段を自動的に制御するためのセンサ機構であって、実際の通路部の領域および通路部の前方の領域の両方を確実かつ簡単な方法で検出できる機構を提供すること。
【解決手段】
ある走査角度(A)で互いに開いた2つのレッグの間に定義される走査範囲(12)を生成するスキャナ(10)を備え、該スキャナ(10)が水平方向の広がりが画定されている通路部の遮断手段(18)を制御するように構成された、走査領域(16)を走査するセンサ機構であって、スキャナ(10)が、通過方向(14)について見たときに、通路部および制御対象の遮断手段(18)から離して取り付けられ、走査範囲(12)が、通路部の方に向けられ、通路部を通過して延設されていること。
(もっと読む)
81 - 100 / 310
[ Back to top ]