
Fターム[5J084AA01]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 存在検知 (455)
Fターム[5J084AA01]の下位に属するFターム
特に動く物体の存在検知 (112)
特に静止物体の存在検知 (33)
Fターム[5J084AA01]に分類される特許
41 - 60 / 310
空間計測システム及び計測方法、並びに昇降機制御システム
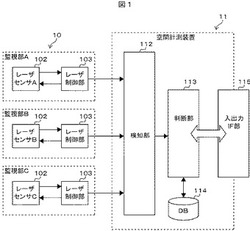
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
物体検出ユニット

【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
物体検出装置及びこれを備えた車両衝突回避システム
【課題】検出対象物の誤検出が発生しにくい物体検出装置を提供することを課題とする。
【解決手段】探査レーザー光源から照射されるレーザー光を偏向器により走査し、その走査範囲からの反射光の強度に基づいて当該走査範囲内に存在する障害物を検出する物体検出処理を行う。物体検出処理では、走査範囲全域にレーザー光を走査して障害物の一次検出を行い、障害物を一次検出した場合には、障害物の検出箇所を含む所定範囲に走査範囲を限定して再びレーザー光を走査し、これにより検出した反射光の強度に基づいて障害物の2次検出を行う。
(もっと読む)
歩行者検出装置
【課題】検出点群から歩行者を高精度に検出する歩行者検出装置を提供することを課題とする。
【解決手段】検出手段によって検出された検出点を複数の検出点群としてグループ化し、それらの検出点群D4から歩行者を検出する歩行者検出装置であって、検出点群D4毎に検出点群D4の移動方向(速度ベクトルD5の方向に相当)を検出する移動方向算出手段S5と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7を算出する分布情報算出手段S7と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7の時間変化に周期性があるか否かを判定し、周期性がある検出点群を歩行者と判定する判定手段S9とを備えることを特徴とする。
(もっと読む)
レーザレーダ
【課題】簡素な構成の光検出器により目標領域からの反射光を適正に受光することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光源21と、ピンホール23aを有するピンホール板23と、ピンホール23aを通過したレーザ光を目標領域において走査させるミラーアクチュエータ25と、目標領域により反射され、さらに、ピンホール板23のミラー面23bによって反射されたレーザ光を受光する光検出器33とを備える。ピンホール板23は、レーザ光の光軸に対して傾くように配置され、レーザ光源21側と反対側の面がミラー面23bとなっている。ミラー69が回動しても、光検出器33に対する反射光の入射位置は変化しないため、単一受光面の小さな光検出器33により、反射光を適正に受光することができる。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
距離測定装置および距離測定方法
【課題】光ビームを測定対象物に照射して測定対象物までの距離を測定する距離測定装置および距離測定方法において、光ビームの照射ができない範囲が無く、従来に比べて捜査範囲を広くする。
【解決手段】光ビームを測定対象物に照射して測定対象物までの距離を測定するとき、距離測定装置は、向きの異なる複数の光ビームのそれぞれをビーム出射部から出射する。このとき、距離測定装置は、反射面上に沿って回転軸を持ち、前記回転軸の周りに軸回転する1つまたは複数の反射ミラーの反射面上の前記回転軸の位置で前記複数の光ビームを反射させることにより、測定対象物に前記光ビームのそれぞれを照射させる。距離測定装置は、前記光ビームの照射により測定対象物で反射して戻ってきた反射ビームを前記反射ミラーで反射させて受光し、受光した前記反射ビームを用いて、測定対象物までの距離情報を求める。
(もっと読む)
物体検出装置及びこれを備えた車載機器制御装置
【課題】互いに異なる波長帯の光を発する少なくとも2種類の検出対象物を検出する際に外乱光が存在しても、高精度な検出を可能とする。
【解決手段】撮像装置が撮像した画像データから、対向車両のヘッドランプと先行車両のテールランプがそれぞれ発する各検出波長帯(赤色と白色)についての分光情報を取得するとともに、同画像データから当該分光情報に対応した検出波長帯についての偏光情報を取得し、取得した分光情報によりヘッドランプとテールランプを識別し、偏光情報を用いてヘッドランプ及びテールランプからの直接光と雨路面からの照り返し光とを識別する。
(もっと読む)
レーザレーダ
【課題】迷光が入射される場合にも、回路規模の増大を招くことなく、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光の反射光を受光する光検出器33と、光検出器33を移動させる光検出器駆動部34を有する。光検出器駆動部34は、光検出器33を反射光の入射位置に移動させる。光検出器33を反射光の入射位置に移動させることにより、複数の光検出器および回路部を用いずに、反射光を精度よく検出することができる。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
障害物検知装置
【課題】演算処理量を軽減して、自車の車高よりも低い位置に存在する空中障害物を検知することができる障害物検知装置を提供する。
【解決手段】路面から所定の高さH/2の位置に、水平方向に対して第1の角度θ1で下向きに車両Aに設置され、第1のレーザー光を発光・受光して第1の障害物(路面)を検知する第1の検知手段1と、車両Aの上端から所定の高さH/2だけ低い位置に、水平方向に対して第1の角度θ1と対称の角度である第2の角度θ2で上向きに設置され、第2のレーザー光を発光・受光して第2の障害物(空中障害物)を検知する第2の検知手段2と、第1の検知手段1による発光から受光までの第1の時間T1と第2の検知手段2による発光から受光までの第2の時間T2とを比較して、第2の障害物が車両Aの車高Hよりも低い位置に存在する空中障害物であるか否かを判断する判断手段3と、を有する。
(もっと読む)
レーザレーダシステム及び移動体
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
物体検知システム及び方法
【課題】レーザセンサから照射されるレーザビームが障害物に遮断されて物体が一時的に未検知となっても、連続性を以て同一の物体を特定する。
【解決手段】監視領域にて物体の探索をする探索空間、及び物体を検索する所定の単位のマス目からなる検索グリッドの数を物体毎に設定しておき、得られる測距データから監視領域内に存在する物体を経時的に測距する。障害物によりレーザビームが遮断されて、物体が一時的に未検知となった場合、探索空間にレーザビームを照射して物体を経時的に探索する。探索による物体の探索の対応を経時的に取りながら物体の位置の検索及び追跡し、この追跡により得られるデータを用いて、物体の軌跡を表示する。
(もっと読む)
搬送車両および運転支援装置
【課題】パレットに対して搬送車両を進行させるべき方向を運転者が容易に認識できる搬送車両および運転支援装置を提供すること。
【解決手段】周囲状況画面では、搬送車両1の周囲状況として、第1レーダレーダ5A(又は、第2レーダレーダ5B)の走査により障害物が検出されなかった障害物非検出エリアAと、障害物の影となって測定が行えない検知不可能エリアBとが、それぞれ異なる表示態様で表示される。例えば、障害物非検出エリアAと、検知不可能エリアBとが、運転者が区別可能に、別々の色で表示される。これにより、搬送車両1がパレット100の架台部100aの下に進入する場合に、搬送車両1をパレット100の架台部100aの下に進入させることが可能な進入経路を、運転者が容易に見いだすことができるので、パレット100に対して搬送車両1を進行させるべき方向を運転者が容易に認識できる。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
41 - 60 / 310
[ Back to top ]