
Fターム[5J084AB09]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 被搬送物 (18)
Fターム[5J084AB09]に分類される特許
1 - 18 / 18
撮像対象物の境界検知装置および境界検知方法

【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
速度計測装置および方法

【課題】速度の計測範囲を広げる。
【解決手段】速度計測装置は、測定対象のウェブ11にレーザ光を放射する半導体レーザ1と、レーザ1の光出力を電気信号に変換するフォトダイオード2と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とが交互に存在するようにレーザ1を動作させるレーザドライバ4と、フォトダイオード2の出力電流を電圧に変換する電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力から搬送波を除去するフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の数を求める信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度を算出する演算部8を備える。レーザドライバ4は、第1の発振期間と第2の発振期間で時間に対する発振波長変化速度の絶対値が異なるようにレーザ1を動作させる。
(もっと読む)
放射線透視装置
【課題】運動する被検査物の内部を簡単に透視できる放射線透視装置を提供することを目的とする。
【解決手段】放射線透視装置が、放射線照射部から離間した被検査物に放射線を照射して被検査物の内部を透視する放射線透視装置であって、被検査物の位置を検出する位置検出手段と、該位置検出手段が、検出した被検査物の位置に向けて放射線を照射するように放射線照射部を制御する制御手段とを具備する。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中のウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1からのレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2と電流−電圧変換増幅部5とフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
糸速度依存パラメータ測定方法
【課題】糸速度依存パラメータを非衝突的に測定する方法である、相関測定方法は特に高い糸速度を測定する場合に多大のコストを必要とするため、これに代わる測定方法を提供する。
【解決手段】糸3に光ビーム2を投射(geworfen)し、そして、散乱によって少なくとも第1光波4を拡散(gestreut)し、検出器6において第1光波4を第2光波5と重畳(Ueberlagerung)させ、第1及び第2光波4、5の周波数間のドップラー偏移(Dopplerverschiebung)を測定する、糸3の速度依存パラメータ測定方法により、解決することができる。
(もっと読む)
光電センサ
【課題】様々な生産ラインに応じた被検出物の検出を可能にしつつも誤判定を抑制し得る設定を自動的に行うことができる光電センサを提供する。
【解決手段】周期可変手段を構成する設定部31及び信号生成部32により投光素子11の投光周期を可変しながら、判別手段としての判別部35によって比較部33から出力されるハイレベルの受光パルス信号の連続回数と評価回数との比較結果に基づいてワークWの検出が可能な周期が判別され、投光周期が判別部35にて判別された周期に設定される。
(もっと読む)
光学式変位センサ及び光学式変位計
【課題】 検出対象物の有無を検出する際の検出精度を向上させた光学式変位センサ及び光学式変位計を提供する。
【解決手段】 検出対象物に投射光L1を照射する投光器11と、投射光L1の検出対象物による反射光L2を受光し、受光量に応じた信号を出力する複数の受光素子が線状に配置された受光器14と、各受光素子の出力に基づいて、受光器14上における受光スポットを検出する受光スポット検出部31と、受光スポット検出部31による検出結果に基づいて、受光スポットの個数を判別するスポット数判別部32と、受光スポット検出部31による検出結果に基づいて、受光スポットにおいて受光量が最大となる1次元位置を判別するスポット位置判別部33と、スポット数判別部32及びスポット位置判別部33による判別結果に基づいて、検出対象物の有無を示す検出信号を出力する対象物検出処理部36により構成される。
(もっと読む)
バーコード・スキャナによる移動するアイテムの方向を追跡するための方法および装置
【課題】レーザ・バーコード・スキャナによる移動するアイテムの方向を追跡するための方法、コンピュータ読み取り可能媒体および装置を提供する。
【解決手段】一対の走査面による移動するアイテムの包装グラフィックスから反射するビデオ遷移を感知するステップと、一対の走査面の各走査面が感知したビデオ遷移の数をカウントするステップと、一対の走査面の各走査面のビデオ遷移のカウントした数を、第1のサンプルのところの所定の閾値と比較することにより、移動するアイテムが各走査面と交差したかどうかを判定するステップとを含む。時間的に第2のサンプルのところで、上記ステップが反復され、この方法は、第1のサンプルおよび第2のサンプルから観察した変化から移動するアイテムの移動方向を評価する追加ステップを含む。
(もっと読む)
検出センサ
【課題】比較的簡単な構成で、移動する物体を測定することが可能な検出センサを提供することを目的とする。
【解決手段】光電センサ30は、投光部31、受光部33、データ処理部40、出力回路51、出力回路制御部55などから構成され、移動するワークWに向けて、投光・受光動作を行なって、ワークWの位置を検出する。受光部33から出力される受光信号Cnはデータ処理部40に入力される。データ処理部40は第一データ処理部45、第二データ処理部47などから構成される。ワークが測定エリアになく測定が正しく行なわれていない場合には、受光信号Cnの変化が大きく現れるが、この変化を、第二データ処理部47で監視することで、ワークWが測定エリアから外れている場合には、出力回路51の出力動作を停止させる。これにより、ワークWが測定エリアから外れた状態で測定された測定結果が、外部に出力されることがない。
(もっと読む)
電力伝送システム及び方法
【課題】 簡易に携帯機器を充電する。
【解決手段】
携帯機器である受電装置40は、受光器42、当該受光器42の位置計測のためのコーナーキューブリフレクタ(CCR)44、及び当該受光器42の出力電気信号により充電される二次電池(48)を具備する。走査型レーザ測距装置50が、CCR44の反射により受光器(42)までの距離と角度を計測し、位置算出装置54が、受光器42の位置を算出する。送電装置10の制御回路24は、位置算出装置54からの位置データに従い、先ず、低輝度光を受光器42に向け照射する。低輝度光のCCR44による反射光は、受光器22に入射する。制御回路24は、受光器22の出力が所定レベル以上の時に、レーザダイオード12から高輝度光を出力させる。この高輝度光は、受光器42に入射する。
(もっと読む)
板速度計
【課題】パージエアによる騒音を大幅に抑制し、圧縮空気の消費量を抑制しつつ、鋼板速度が速い場合にも遅い場合にも常に正確な速度測定が可能な板速度計を提供する。
【解決手段】パージエアが供給されるハウジング1の内部にレーザ速度計2を収納し、ハウジング1の端部に設けたパージノズル4の内部から板の表面にレーザ光線を照射する板速度計の改良であって、パージノズル4をテーパ部5を備えた先細とするとともに、パージノズル4の外側にサイドパージノズルを7を設け、中心部よりも外側位置における板表面上のパージエア面圧を確保する。これにより騒音が大幅に低減し、また鋼板表面のクーラント液を確実に排除して精度の高い速度測定ができる。
(もっと読む)
光電センサ装置及び対応するセンサを動作させるための方法
【課題】光電センサ装置を動作させるための方法を提供すること。
【解決手段】センサ装置は、パルス化された光を放射する第1のモジュール、光を受け取り変換する第2のモジュール及びレベルを判定しかつ/又処理する第3のモジュールを備える。方法は、第1のモジュールから第2のモジュールへ向かって周期的に光のパルスを送るステップと、アナログポテンシャル信号を第2のモジュールで生成し、第3のモジュールへ送出するためのステップと、第3のモジュールでアナログ信号を処理し、処理結果に応じて評価又は制御情報又は信号をもたらすステップとを備え、第3のモジュールに送出する前に、第2のモジュールによって生成されたアナログ信号を反転してシフト又はオフセットするステップと、第3のモジュールで、反転されシフトされたアナログ信号を2つの連続する光のパルスの間で測定し、測定した値を処理するステップを備えることを特徴とする。
(もっと読む)
赤外光IDタグ位置検索装置
【課題】 従来から電波若しくは電磁誘導を用いた検索装置はRF−IDによる多重通信による一括読取装置として既に開発されているがIDタグの近接、或は狭い場所に多くのタグを並べた場合、電波の相互干渉の問題が発生し、完全なものに至っていない。本考案は赤外光IDタグを用いる事により、これを解決している。
【解決手段】 本考案は特開2003−120088で開発された赤外光IDタグを使い、同タグのデータ転送ダイオードに可視光ダイオードを用い、目視出来る様にして検索を可能としたもので、通信手段に赤外光及び可視光を使用している為、指向性が強くIDタグ間の相互干渉が発生しない事がRF−IDの課題を大きく改善している。
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 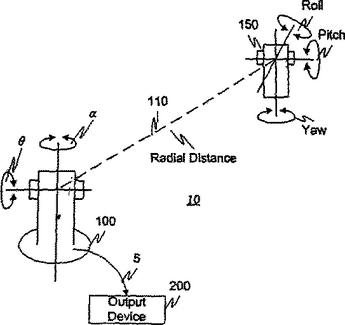 (もっと読む)
(もっと読む)
器具の位置の非接触型決定を実行する方法及びシステム
本発明の実施形態は器具(410、540、630、720)の位置を非接触的に決定する方法或いは決定するシステムに関する。一実施形態においては、非接触型測定システムが移動機械に連結された器具の位置を決定する。移動機械の地理的位置を測定し(320)、器具(330)の地理的位置が、移動機械(330)の地理的位置及び器具の移動機械(310)に対する位置に基づいて決定する。  (もっと読む)
(もっと読む)
光センサおよび測距方法
【課題】良好な精度と応答性を両立した光センサおよび測距方法を提供する。
【解決手段】測定の基準となる基準距離を予め設定し、物体までの距離がその基準距離よりも近いか遠いかを判定する。また、基準距離を段階的に切り替えながら上記判定処理を繰り返して、物体の存在領域を絞り込むことによって、物体までの距離を測定する。このような処理であれば、受光信号全体を詳細にサンプリングせずとも、十分な精度の判定結果を得ることができる。
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]