
Fターム[5J084AB16]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 平面的な広がりを有する物体 (100)
Fターム[5J084AB16]に分類される特許
1 - 20 / 100
無人走行体を用いた環境情報の取得システム
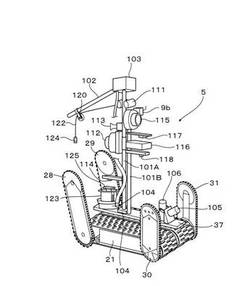
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
距離計測装置

【課題】計測距離の精度向上を図る。
【解決手段】駆動部14によりレーザ光の照射方向が鉛直下方向になったときに計測される距離計測装置と地面との距離と、メモリに記憶された情報に基づいて特定される距離計測装置と地面との距離の差分から計測距離の総合誤差を算出し、この計測距離の総合誤差を用いて計測距離が補正する。
(もっと読む)
無線方式レーザスキャナ設定取得方法
【課題】レーザ光を使用したレーザ計測システムにおけるレーザスキャナに関して、従来のようにコード等の有線に影響されることなく、安全且つ自在に、レーザスキャナのエリア設定及び計測結果の取得を遠隔から行うことができるようにした無線方式レーザスキャナ設定取得方法を提供する。
【解決手段】レーザ光を発射する発光部と発射したレーザ光の反射光を受光する受光部とを有するレーザ計測装置に、レーザ光の発光時と反射光の受光時との時間差により測定対象物までの距離を計測する距離計側部からの計測信号を遠隔制御装置に無線通信によって送信する一方、遠隔制御装置からの制御信号をレーザ計測装置に無線通信によって送信することにより、遠隔制御装置で、レーザ計測装置によって計測された計測結果の取得とレーザ計測装置に設定すべき信号の制御とを行うようにした。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
プラットホームドア用安全装置
【課題】 プラットホームドアの近傍の所定の領域内に存在する物体を従来より正確に検出することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置は、自身に対する物体の距離を受光素子の出力のピークのタイミングに基づいて取得して距離の情報をそれぞれ有する画素の集合である距離画像を生成するタイムオブフライト方式の三次元センサーと、プラットホームドアの近傍の検出領域内に存在する物体を検出する領域内物体検出手段と、領域内物体検出手段によって物体の検出に使用される画素である検出用画素を選定する検出用画素選定手段とを備えており、検出用画素選定手段は、三次元センサーによって生成された距離画像の画素のうち、その距離画像より前に三次元センサーによって生成された距離画像からの距離の変化量が所定の基準を満たす(S103でYES)画素のみを検出用画素として選定する(S104)。
(もっと読む)
自己位置推定装置、方法、及びプログラム
【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】デメリットシーンにおいてより正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体までの距離及び車幅方向の角度に基づき、車両前方の道路形状を認識し、その認識された道路形状及びその認識程度に基づき、物体が自車と同一車線上にいる可能性を判定し、その判定結果に基づいて自車線確率を補正するための補正値を算出する。そして、自車走行路の曲率と認識された道路形状の曲率とに乖離があるか否かを判定し、乖離がない場合、自車線確率を補正値にて補正し、その補正後の自車線確率に基づいて先行車を選択する一方、乖離がある場合、自車線確率を補正値にて補正せずに自車線確率に基づいて先行車を選択する。
(もっと読む)
歩行者検出装置
【課題】検出点群から歩行者を高精度に検出する歩行者検出装置を提供することを課題とする。
【解決手段】検出手段によって検出された検出点を複数の検出点群としてグループ化し、それらの検出点群D4から歩行者を検出する歩行者検出装置であって、検出点群D4毎に検出点群D4の移動方向(速度ベクトルD5の方向に相当)を検出する移動方向算出手段S5と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7を算出する分布情報算出手段S7と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7の時間変化に周期性があるか否かを判定し、周期性がある検出点群を歩行者と判定する判定手段S9とを備えることを特徴とする。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
レーザ密度分布推定装置、レーザ密度分布推定方法、及びプログラム
【課題】森林域の地形の航空レーザ計測において、地表へ到達するレーザの密度が樹木密集度や地表の傾斜に応じて受ける影響を評価する。
【解決手段】林分収穫表に示される樹木の属性(樹種・樹齢)別の標準密度に基づいて、樹間距離を推定する(S64)。レーザの地表への到達率をシミュレーションし、樹木からの距離に応じた到達率関数を属性別に求める。樹間距離と到達率関数とから各属性の植生域の樹木一本当たりのセル内のレーザ到達率を求める(S66)。森林計画図から林班等の属性を取得し、対応する属性のセル内レーザ到達率に基づいて、当該林班等における到達レーザ密度を定める(S68)。また、標高データ48から傾斜区分図50を生成し(S72)、到達レーザ密度に対して傾斜補正を行う(S70)。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
1 - 20 / 100
[ Back to top ]