
Fターム[5J084AC10]の内容
光レーダ方式及びその細部 (24,468) | 装置の設置形態 (779) | その他 (23)
Fターム[5J084AC10]に分類される特許
1 - 20 / 23
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
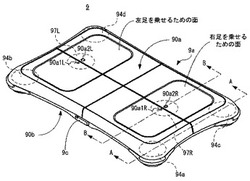
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
レーザ測量機

【課題】簡便に点群データ取得の高速化を可能にするレーザ測量機を提供する。
【解決手段】異なる波長のパルス測距光10a,10bを発する複数の発光源8a,8bを有する光源部2と、各波長毎に時分割して発光させるパルス駆動部9と、前記複数の波長のパルス測距光10a,10bを光軸13上に射出する投光部3と、前記光軸13上に設けられ、前記パルス測距光10a,10bの各波長のみを反射する反射面を複数有し、前記パルス測距光10a,10bを波長毎に分割して測定対象物に向ける様偏向する偏向部材11と、前記測定対象物からの反射測距光10a’,10b’を受光する1つの受光素子12とを有し、該受光素子12からの受光信号24から各パルス測距光10a,10b毎に測距を行う。
(もっと読む)
車軸検知装置
【課題】 軸数センサを道路に埋め込むことなく、レーンを通行する車両の車軸を検出することを目的とする。
【解決手段】 強度変調したレーザ光を走査し、路面に向かって斜め下方にレーザ光を放射する微細電子機械素子スキャナと、物体から反射してくる反射光を受光する長尺フォトダイオードとを有した送受光学部を備えて、長尺フォトダイオードの出力光信号の検波信号からレーザ光の反射点までの距離を計測し、得られたレーザ光の反射点までの距離及びレーザ光の照射方向に基づいて車両のタイヤを検知し、軸数をカウントする。
(もっと読む)
水中距離計測システム
【課題】水中浮遊物がレーザー光である伝送路上に存在しても、これの影響を最小限にすることにより、計測可能な距離を長くとることができ、更に安定して距離計測することができる水中距離計測システムを提供する。
【解決手段】第一の水中機器103と第二の水中機器123間の距離を計測する水中距離計測システムであって、第一の水中機器103は、送信レーザー光を送信する第一のレーザー送信機A104、送信レーザー光が水中浮遊物により反射された反射送信レーザー光を受ける第一のレーザー受信機C109、及び反射送信レーザー光の光量により送信レーザー光のビーム口径を変化させる第一のビーム口径可変部A105を備え、第二の水中機器123は、送信レーザー光を受信し、送信レーザー光を受信したことを示すタイミング情報を発生する第二のレーザー受信機A126を備えている。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
人物動作検出装置、遊具装置、人物動作検出方法、ゲーム方法、制御プログラムおよび可読記録媒体
【課題】多数の空間領域を面状に演算処理する場合に、高いフレームレートでも演算量が膨大にならず、撮像範囲における人物動作の方向と距離の変化量を高精度に検出する。
【解決手段】TOF式距離画像センサ31からの距離情報に基づいて人物の動作情報を検出する高速人物動作検知制御手段4は、TOF式距離画像センサ31からの距離情報に基づいて時系列に複数の距離フレームを生成する距離フレーム生成部431と、少なくとも2つの距離フレームに基づいて、人物に距離変化のない距離情報である距離平衡フレーム(背景画像フレーム)を生成する距離平衡フレーム生成部432と、複数の距離フレームについてそれぞれ距離平衡フレームとのフレーム差分を演算し、フレーム差分から人物の動作情報として人物の距離の変化量と変化方向を算出するフレーム差分演算部46とを有している。
(もっと読む)
レーザレーダ用設置位置検証装置、レーザレーダ用設置位置の検証方法及びレーザレーダ用設置位置検証装置用プログラム
【課題】所定領域に向けてレーザを走査照射して所定領域に存在する物体を検知する3次元レーザレーダを設置するに先立って、レーザレーダの設置位置の検証を、安全、迅速、確実に行うことができる検証装置、検証方法及びプログラムを提案する。
【解決手段】レーザレーダ用設置位置検証装置100は、レーザレーダの設置候補位置Pに配置されると共にレーザレーダの画角と同一以上の画角を有して所定領域ARを含む画像を取得する撮像部110と、所定領域ARのうち設置候補位置Pからの最遠位置50Bと最近位置50Tのそれぞれにおいて撮像部110により撮像される矩形基準板120と、撮像部110により取得した検証用取得画像と矩形基準板120の形状情報に基づいて設置候補位置Pから最遠位置50Bまでの第一距離L1及び最近位置50Tまでの第二距離L2を求める距離演算部と、を備える。
(もっと読む)
物品管理システム
【課題】 店舗や倉庫において、物品の存在位置等の管理を行うことができる物品管理システムを提供すること。
【解決手段】 物品管理システムを、物品を載置する載置部に配置した漏洩伝送路と接続して前記物品に付された無線タグを読み取り無線タグ読取情報を出力する無線タグリーダを有する無線タグ読取手段と、前記載置部に接近する対象物を検出し対象物位置情報を出力する対象物検出手段と、前記無線タグ読取情報と前記対象物位置情報とを関連付けて前記物品の位置情報として出力する物品位置特定手段とを備える構成とする。
(もっと読む)
自動ドア用安全装置
【課題】距離画像センサユニットを用いて鉛直方向での面検知を行い、所定の検知エリアでの支障物を精度良く検知してドア部の接触部分での支障物の挟み込みを確実に防止することのできる自動ドア用安全装置を提供する。
【解決手段】プラットホーム用可動安全柵11の戸袋12の下方に自動ドア用安全装置10の鉛直方向距離画像センサユニット22を配置する。自動ドア用安全装置10は、ドア部13付近で略鉛直方向にレーザー光23aを照射し、ドア部13に平行な検知エリア16(17)で面検知を行い、扇形エリア内に支障物があるときこの支障物までの距離情報を含む距離画像を生成する少なくとも1つの鉛直方向距離画像センサユニット22と、距離画像センサユニット22により生成された距離画像に基づいて、扇形エリア内の前記支障物の存在の有無を判定する判定手段27を備えている。
(もっと読む)
投影装置及び投影制御方法
【課題】装置の小型化に寄与し、より簡易な構成で高い精度の測距を実行可能とする。
【解決手段】光源ランプ28と、多数の微小ミラーの光源ランプ28からの光に対する各傾斜角度を制御して反射光により光像を形成するミラー素子26を駆動し、光像を投影レンズ部12を介して投影する投影系24〜34と、光源ランプ28とは別に設けられ、微小ミラーが光源ランプ28からの光を投影レンズ部12の外部に反射させる傾斜角度の状態で微小ミラーへ変調光を入射させ、その反射光が投影レンズ部12を介して出射するように配置したレーザ発光部32A〜32Cと、レーザ発光部32A〜32Cの発光で投影対象から得られる反射光を受信するレーザ受光部13と、レーザ発光部32A〜32Cの発光とレーザ受光部13の受光の位相差により投影対象までの距離を測定し、測定した距離により投影系24〜34での投影条件を制御するCPU35、メインメモリ36及びプログラムメモリ37とを備える。
(もっと読む)
接近検出装置
【課題】投光方向や受光方向を適切な角度に設定するにあたり、光学系と投光/受光素子の光軸合わせを精度よく行う必要がないようにし、組立作業効率の向上を図る。
【解決手段】投光用光学系14Eおよび受光用光学系14Rのシリンドリカルレンズ部14bは、いずれも光線をy方向(xz平面と直交する方向)にのみ集光し、x方向に関しては素通しである。投光素子11および受光素子12は、各々の光軸Ze,Zrが軸Z側に傾くように配置され、これにより光軸Ze,Zrが所定距離において軸Z上で交差する。
(もっと読む)
移動ロボットの監視装置および監視方法
【課題】人と移動ロボットが同一エリアを移動する場合に、移動ロボットの大きさと速度が人と同じ程度である場合でも人と移動ロボットを確実に識別することができ、移動ロボットの安全機能が誤動作しても監視員なしで人の安全を確保することのできる移動ロボットの監視装置および監視方法を提供する。
【解決手段】移動ロボット1に取り付けられレーザ光を強く反射するリフレクタ12と、移動ロボットの移動エリアを3次元計測する3次元レーザレーダ14と、3次元レーザレーダによる計測結果から移動ロボットと人とを識別し、人と移動ロボットの相対距離が所定の閾値より小さいときに移動ロボットの動作を抑制するロボット抑制装置16とを備える。
(もっと読む)
ヤードクレーンの距離測定装置、ヤードクレーン、距離測定装置の光軸調整治具および距離測定装置の光軸調整方法
【課題】 赤外線などの不可視光を用いても光軸の調整を容易に行うことができるヤードクレーンの距離測定装置および、ヤードクレーン、距離測定装置の光軸調整治具および距離測定装置の光軸調整方法を提供する。
【解決手段】 不可視光を出射する光源部と、出射された不可視光を反射する反射部41と、出射された不可視光の反射を妨げる遮蔽部42とを有し、光源部から見た反射部41と遮蔽部42との相対位置が変更可能とされたターゲット22と、反射された不可視光を検出する検出部と、が設けられていることを特徴とする。
(もっと読む)
物品管理システム及び情報処理装置
【課題】本発明は、棚や台に陳列された、商品、見本品等の物品に対する消費者の注目度を、詳細に調査することが可能となる物品管理システム及び情報処理装置を提供することを目的とする。
【解決手段】上記した目的を達成するために、本発明の物品管理システムでは、載置部に載置される複数の物品の物品識別情報と物品が載置される位置を示す物品位置情報を関連付けて記憶する物品載置位置記憶手段と、載置部に載置される物品又は物品が載置される位置に接近する対象物を検出し、その対象物の位置を示す対象物位置情報を計測し出力する対象物検出手段と、この対象物検出手段が出力する対象物位置情報が含まれる物品位置情報を判別し、判別した物品位置情報と関連付けて記憶された物品識別情報を特定する物品特定手段とを備えている。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 一つの受光素子を用いて常に投影画像における外枠近傍の位置との距離を測定できる距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタ1は、光源装置と、光源側光学系と、表示素子と、ズーム機構90を有する投影側光学系と、プロジェクタ制御手段と、距離測定装置15と、傾斜角算出手段及び距離算出手段とを有し、距離測定装置15が、距離測定部51と測定位置調整部52とを有するものであって、この距離測定装置15は、レーザ光線を照射する複数のレーザユニット58と、測距対象からの反射光を受光する複数のレーザユニット58の中心に配置された受光素子56とを有し、レーザユニット58から照射されるレーザ光線の照射方向を相互に間隔を広げる方向に変化させる光学素子を備えるものであり、この光学素子は、レーザユニット58との距離を可変とされた凹レンズ61とされるものである。
(もっと読む)
能動型物体検知装置
【課題】有効とする検知エリアの列を容易に設定できるようにして施工性の向上を図った能動型物体検知装置を提供する。
【解決手段】複数の検知エリアA1〜A5に向けて物体検知用の検知波を送出する投光器1と、物体で反射した検知波を受けて受光信号を発生する受光器2とを備え、検知エリアA1〜A5は投光器1に近い位置から遠い位置に向かって複数列に配置されており、受光器2は検知エリアA1〜A5の各列ごとに受光する相異なる複数の受光素子8A〜8Fを有し、さらに、検知エリアA1〜A5の各列に対応した受光素子8A〜8Fが受光信号を出力したときに、その検知エリアA1〜A5の列ごとに相異なる色の光または相異なる音を発生する検出報知手段19を備えている。
(もっと読む)
構造体の構築方法および建入精度管理方法
【課題】計測時間および施工時間を短縮するとともに、施工済構造体の出来型形状把握の精度を高めて、構造物の施工精度を高める。
【解決手段】構造体を所定の節毎に順次建て入れて構造物を構築する工事に適用される構造体の建入精度管理方法において、建入れが完了している施工済構造体10の、次節構造体20との接続部分11を、三次元レーザスキャナ30を用いて立体的に計測し、構造体を製造あるいは加工する際に、施工済構造体10の接続部分11の出来型形状に基づいて、次節構造体20を補正加工し、その次節構造体20を建て入れる。
(もっと読む)
赤外線ユーザーセンサを有する流体分与器
【課題】物体が目標区域に入った時に、ユーザーに自動的に分配するために光検出器と関連するコントローラを利用する分配システム。
【解決手段】コントローラ26は、光検出器22に近接して取り付けられた光源24をパルスさせるようにプログラムされている。コントローラは、光検出器の受信信号で電圧を常時モニターし、オンオフでパルスされる光から電圧の差を評価する。コントローラは差を合計し、平均差の値を生起するために指定の期間にわたって差を常時更新する。平均差の値は目標オフセット値と合計され、瞬間電圧差と比較される。瞬間差が目標オフセット値及び平均差の和を超える場合、コントローラは、物体上に流体又は他の製品を分配する分配機構に信号を送る。
(もっと読む)
動作追跡装置および方法
【課題】 本発明は動作追跡装置および方法に関するものであって、入射された映像に基づいてレーザを照射するために映像の入射軸とレーザの照射軸を同期化させ、照射されたレーザを利用して被写体の動作を追跡する動作追跡装置および方法を提供する。
【解決手段】 本発明の実施形態による動作追跡装置は入射された光の一定量は反射させ残りは透過させる半透過鏡と、前記半透過鏡に反射され入射された映像の入力を受ける映像入力部と、前記入力された映像内に含まれた第1被写体の位置を確認する位置確認部および前記確認された位置を参照して前記半透過鏡と前記第1被写体をつなぐ軸上から前記第1被写体に前記半透過鏡を透過するレーザを照射し前記第1被写体を追跡する目標物追跡部を含む。
(もっと読む)
物体検知装置および方法
【課題】単一の距離センサのみで簡易な構成および効率的な処理によって、測距領域に侵入した検知物体の種類の正確な検出を行なうことができる物体検知装置および方法を提供すること。
【解決手段】警備装置100において、測距領域における物体を検知する測距センサ101と、検知された検知物体までの距離を算出するセンサ制御部102と、検知物体までの距離に基づいて検知物体の高さを算出する物体高算出部103と、検知物体の高さと測距領域における検知物体の幅とに基づいて検知物体の断面積を算出する断面積算出部104と、検知物体の断面積に基づいて検知物体の種類を判断する物体判断部105とを備えた。
(もっと読む)
1 - 20 / 23
[ Back to top ]