
Fターム[5J084AD01]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 時間測定 (774)
Fターム[5J084AD01]に分類される特許
761 - 774 / 774
光電検出デバイス
本発明は、光電検出デバイス、特にはレーザ・スキャナに関する。この光電検出デバイスは、好ましくはパルス化された電磁放射線を送信するための送信デバイスと、前記送信デバイスと関連づけられた少なくとも1つの受信デバイスと、前記送信デバイスによって送信される放射線を監視領域内へ誘導し、且つ前記監視領域により反射される放射線を前記受信デバイスに誘導するために使用される少なくとも1つの偏向デバイスと、を備える。上記送信デバイスは、特定の送信経路に沿って放射線をそれぞれ送信する幾つかの(好ましくは2つの)別個の送信モジュールを備える。  (もっと読む)
(もっと読む)
光波距離測定方法及び光波距離測定装置

【課題】
測定途中及び背景に、測定に影響を及ぼし易いガラス、金網等の非測定対象物が介在した場合でも、確実に測定対象物迄の距離を測定できる様にする。
【解決手段】
合焦機能を有する光波距離測定装置に於いて、合焦レンズ26の位置を検出する合焦位置検出部35と、光波距離測距部29と、予め求められた合焦レンズの位置と測定対象物7迄の距離との対比関係を記憶する記憶部43と、合焦レンズの位置と対比関係から参照距離を求めると共に前記光波距離測距部で得られる測距距離とを比較して該測距距離が前記参照距離と略等しい場合に測定距離と判定する制御演算部33とを具備する。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 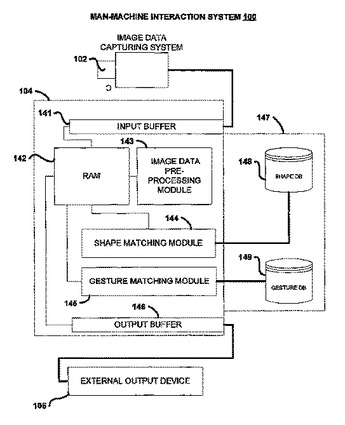 (もっと読む)
(もっと読む)
目標捕捉装置
多重反射のビーム成分を意図的に減衰させる。減衰フィルタ(18,19)を受信器(2)の前に及び送信器(1)の後にそれぞれ設ける。ビーム成分の強度の減衰は、ファクターで0.7、少なくとも0.5または0.3となる。別の方法または追加的に、ミラー(10)または立方体プリズム(14)の偏向手段を用いてビームを減衰させることができる。多重反射するビーム成分は、減衰手段を少なくとも2回通過する。従って、通常のビーム成分に比べて、一層減衰される。さらに受信器(2)の入力表面(5)は、円錐の偏向表面で囲まれている。この偏向表面は、そこに入射する光を吸収し、残部を入力方向以外の方向に反射して、多重反射を生じさせない。  (もっと読む)
(もっと読む)
スペクトルおよび空間選択性を特徴とする電子距離測定装置
特に、表面を測定するための地上用あるいは宇宙空間用の望遠鏡アレーのための距離測定装置を開示する。この距離測定装置は、測定される目標の上に電磁放射(ES)を発射するための少なくとも一つの放射源と、その目標により反射された放射(S)を受信し距離を得るためのセンサ(11)を有する受信器と第1のスペクトルフィルタ(4)を備える。本発明によると、反射された放射(S)の受信の角度の広がりは、少なくとも一つの空間フィルタ(6′)、特に、放射源と受信器としてのファイバレーザーにより制限される。  (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。  (もっと読む)
(もっと読む)
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。 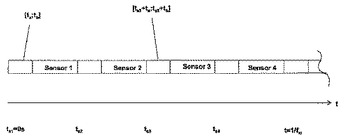 (もっと読む)
(もっと読む)
目標とする空間を記録するための装置
光電式距離計を用いて、信号・所要時間の方法により目標とする空間を記録するための装置は、光信号、特にレーザー信号を送出するための送信器(S)と、目標とする空間内に有る物体によって反射された光信号、特にレーザー光線を受けるための受信器(E)とを備えている。更に、送信器(S)と受信器(E)の光軸を、有利には二つの直交する方向の間で偏向させるための走査器が配備されている。送信器(S)と受信器(E)の光軸は、ほぼ平行に延びる。更に、送出した光信号の所要時間又は位相位置から、距離値を算出して、この距離値と走査器の光線の偏向角とから個々のデータ要素の空間座標を得るための評価機器が有る。この装置は、架台(21,22,24)の中空軸(33,34)を用いて軸支されている回転する測定ヘッド(8)と、中空軸(33,34)に対して軸方向に入射する光線を半径方向に偏向可能とするとともに、その逆も可能とする、測定ヘッド(8)に対して固定して配置されたミラー機器(41,42)とを備えている。位置を固定して配置された送信器(S)の光線を、中空軸(33,34)に対して軸方向に誘導することが可能であるとともに、ミラー機器(41,42)によって、半径方向に送出することが可能である。それに対して、目標とする空間内に有る物体によって反射された光線を、ミラー機器(41,42)によって、中空軸(8,33,34)の軸の方向に偏向することが可能であるとともに、同じく位置を固定して配置された受信器(E)に供給することが可能である。  (もっと読む)
(もっと読む)
間隔測定方法及び装置

本発明は、特に自動車(1)に連行される間隔センサ(5)と物体(5)との間の間隔測定を、電磁パルス(6)の送信及び物体により反射される信号(7)の受信、及び信号伝搬時間の検出により行う方法と、この方法の実施に適した装置に関し、物体(2)における反射後受信される信号(10)が量子化され、加算され、続いて平均値が形成され、方法の実施形態において、受信されるパルスが、変調信号(18)に重ねられる。 (もっと読む)
3次元距離測定用の光電子センサおよびデバイス
本発明は変調された光子束(50)を復調する光電子センサ、および少なくとも1つのそのような光電子センサを備えた特に3次元距離測定用の測定デバイスに関する。本発明の光電子センサは、半導体領域(10)内に組み込まれ、例えば、半導体領域内で拡散され、半導体領域(10)と逆にドープされた少なくとも2つの収集領域(20、22)を備える。前記収集領域(20、22)を用いて変調された光子電流(50)の進入によって生じる少数担体が収集かつタップされる。さらに少なくとも2つの制御領域(32、34)が半導体領域(10)内に組み込まれ、前記制御領域は制御領域(32、34)に印加することのできる制御電圧に従ってドリフト領域を生成する。前記制御領域(32、34)は半導体領域(10)と同様にドープされている。
 (もっと読む)
(もっと読む)
レーザー周辺認識システム
潜在的脅威を検知するために目標位置の周辺区域をレーザー走査する方法は、周辺区域を横切ってパルス化レーザービームを走査し、パルス化レーザービームからのエコーを受信しそしてシーン画像を形成するために複数の周辺区域走査を形成することよりなる。加えて、目標位置の周辺区域において検知された潜在的脅威を認証する方法は、潜在的脅威を検知し、無線で潜在的脅威に質問し、所定の時間間隔内で応答が送信されない場合、又は受信された応答が適正なアクセスコードを備えていない場合は、潜在的脅威は認証されないと宣言する。 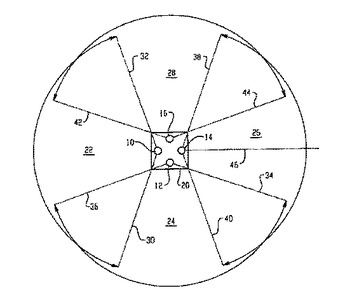 (もっと読む)
(もっと読む)
距離情報入力装置
【課題】本発明は、クロストークの低減された高精度な距離情報を取得可能にする距離情報入力装置を提供する。
【解決手段】本発明の一態様によると、輝度変調光源によって輝度変調された光が照射された前記対象物からの反射光を受光し、光電変換を行うと共に、前記輝度変調光源と同期して感度変調可能な受光素子を備えた距離情報入力装置において、前記受光素子は、光電変換部と、二つの電荷蓄積部と、二つの電荷振り分けゲートと、二つの電荷検出部と、二つの電荷転送部とを有し、前記受光素子のリセット動作と前記電荷蓄積部に蓄積された電荷を読み出す読み出し動作との間に、前記電荷振り分けゲートをオフして前記電荷蓄積部のポテンシャルを上げることによって飽和電荷量以上の余剰電子を排出する動作を少なくとも一回行なうことを特徴とする距離情報入力装置が提供される。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
距離計測装置及び物体検知装置
【課題】 被測定対象物体からの反射光束を確実に検出することができ、高精度な距離計測が可能となる距離計測装置及び物体検知装置を提供すること。
【解決手段】 投光光学系11は、光源12と、光強度補正手段としての投光レンズ(コリメートレンズ)13とを有している。光源12は、レーザダイオード駆動回路(LD駆動回路)33から入力された駆動信号に対応して、光束を出力するレーザダイオード(LD)である。投光レンズ13は、LD12から出力された光束を被測定対象物体Tに向けて出射すると共に、LD12から出力された光束の光強度分布を補正するためのものであり、投光レンズ13から所定の距離離れた位置においてLD12から出力された光束の光軸付近の光強度よりも光束の周辺部の光強度が高くなるように、光束の光強度分布を補正する。投光レンズ13は、非球面レンズ部分とシリンドリカルレンズ部分とを含んでいる。
(もっと読む)
761 - 774 / 774
[ Back to top ]