
Fターム[5J084BA03]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039)
Fターム[5J084BA03]の下位に属するFターム
半導体レーザ (523)
Fターム[5J084BA03]に分類される特許
161 - 180 / 516
対象物検出装置及びプログラム
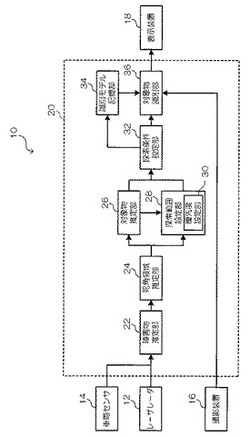
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
物体識別方法及び物体識別装置

【課題】反射物体が存在する場所においても、物体の誤認識を抑制することができる物体識別方法及び物体識別装置を提供する。
【解決手段】物体識別装置1は、車両前方の物体にレーザ光を照射し物体からのレーザ光の反射状態によって物体との距離を測定するレーザ装置3と、少なくとも上記レーザ光の波長帯域の光を受光させるフィルタ部5aを備えたカメラ5と、レーザ装置3で対象物との距離を測定すると共に、レーザ装置3のレーザ光の照射方向に撮像方向を略一致させてカメラ5で撮像を行い、カメラ5がレーザ光の照射軌跡を認識した場合には、レーザ装置3で測定された対象物との距離値を無効にする。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得るうえ、隣接して存在する走行可能領域間の境界部分の段差をも検出して走行の可否を判定し得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11を用いて取得した移動ロボットRの前方側プロファイルデータの幾何的特徴量から領域の分割を行い、分割後の領域内の計測点データから勾配や表面粗さなどの幾何的特徴量を評価して、分割した領域を走行可能領域及び走行不能領域に区分けし、加えて、区分けによる走行可能領域G1,G2が隣接している場合、走行可能領域G1,G2間の境界部分Nのデータから、段差Hなどの幾何的特徴量を評価することで、移動ロボットRの境界部分Nでの走行の可否を判定処理する。
(もっと読む)
液晶表示装置および測距光学装置
【課題】 ビームスプリッタを備えた測距装置等において、安価で表現の自由度が高い液晶パネルを使用して、高輝度・高コントラストの表示が可能な表示装置を提供する。
【解決手段】 対物レンズと接眼レンズとの間の光路上に介装したビームスプリッタ3を介して、対物レンズからの観察像に、表示装置からの表示画像を合成する装置において、前記表示装置として、LEDをバックライト17aとして備える垂直配向型の液晶パネル17bを設け、かつ前記液晶パネルは、前記接眼レンズ(12)に向けた表示画像の光路L1に対して所定角度だけ傾斜して設ける。
(もっと読む)
距離画像処理システム
【課題】 距離画像センサの設置位置を変更した場合でも、容易に背景画像を生成することができるとともに、環境温度や経年変化が生じた場合でも、常に正確な距離測定を行うことのできる距離画像処理システムを提供する。
【解決手段】 所定の被測定対象の距離値を検出する距離画像センサ1と、距離画像センサ1から入力される各画素の距離値に基づいて背景画像を生成するとともに、この背景画像の距離値の差分から距離画像を生成する画像処理回路46を備えた画像データ処理装置2と、を備え、画像処理回路46は、距離画像センサ1により取得された各画素の距離値が最大となる距離値を保存しておき、各画素の最大の距離値に基づいて背景画像を生成するように構成されている。
(もっと読む)
窓検出装置及び車種判別装置及び窓検出方法及び車種判別方法
【課題】車両の窓を検出し、その検出結果に基づいて、車両の車種を判別する。
【解決手段】放射部111は、車両に対して放射光751を放射する。受光部115は、放射光751が車両に当たって反射した反射光754を受光する。反射位置算出部122は、放射部111が放射光751を放射してから受光部115が反射光754を受光するまでの時間に基づいて、放射光751が車両850に当たって反射した反射位置を算出する。窓検出部130は、反射位置算出部122が算出した反射位置に基づいて、車両の窓の位置を検出する。
(もっと読む)
放射線透視装置
【課題】運動する被検査物の内部を簡単に透視できる放射線透視装置を提供することを目的とする。
【解決手段】放射線透視装置が、放射線照射部から離間した被検査物に放射線を照射して被検査物の内部を透視する放射線透視装置であって、被検査物の位置を検出する位置検出手段と、該位置検出手段が、検出した被検査物の位置に向けて放射線を照射するように放射線照射部を制御する制御手段とを具備する。
(もっと読む)
三次元画像を形成するための識別専用オプトロニックシステムおよび方法
【課題】三次元画像を形成するための識別専用オプトロニックシステム及び方法を提供する。
【解決手段】光センサと、通信手段21、22と、コンピュータ処理手段1とを含み、センサが捕捉した画像から三次元の物体を再構成し、当該再構成に基づいて物体を識別可能にする、物体を識別するためのオプトロニックシステムであって、光センサが、物体5周囲の何通りかの観測角61、62で捕捉された、物体5の表面で反射される電磁放射の輝度レベルを表す物体の画像を記録でき、通信手段21、22が、物体表面で反射される電磁放射の輝度レベルを表す前記物体の画像を処理すべく構成された断層撮影機能によって、三次元で物体を再構成できるよう、前記画像をコンピュータ処理手段1に送信できる。
(もっと読む)
センサ機構
【課題】
遮断手段を自動的に制御するためのセンサ機構であって、実際の通路部の領域および通路部の前方の領域の両方を確実かつ簡単な方法で検出できる機構を提供すること。
【解決手段】
ある走査角度(A)で互いに開いた2つのレッグの間に定義される走査範囲(12)を生成するスキャナ(10)を備え、該スキャナ(10)が水平方向の広がりが画定されている通路部の遮断手段(18)を制御するように構成された、走査領域(16)を走査するセンサ機構であって、スキャナ(10)が、通過方向(14)について見たときに、通路部および制御対象の遮断手段(18)から離して取り付けられ、走査範囲(12)が、通路部の方に向けられ、通路部を通過して延設されていること。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長800nm程度の光を出射するレーザ光源11と、レーザ光源11の温度を調節する温調素子12と、レーザ光源11の温度を検出する温度センサ13と、目標領域から反射された反射光を透過させるためのフィルタ211と、フィルタ211を透過した反射光を受光して信号を出力するCMOSイメージセンサ23と、反射光に対するフィルタ211の傾き角を変化させるフィルタ駆動部200とを備える。CPU31は、温調素子12により設定可能な前記レーザ光源11の温度範囲内で、CMOSイメージセンサ23の受光量が最大となるよう温調素子12およびフィルタ駆動部200を制御する。
(もっと読む)
光測距装置
【課題】レーザ安全の基準を満たす様に光測距装置を最適に制御する。
【解決手段】光測距装置は、光反射面を有する可動部が揺動することで光反射面に入射される光を光走査できる光走査部と、可動部を揺動させる駆動信号を、可動部が有する共振周波数に合わせて設定された駆動周波数で、光走査部に供給し可動部を揺動駆動する走査駆動部と、光反射面に向かってレーザ光を投光する光源部と、光反射面で反射走査されたレーザ光が物体により反射された反射光を受光する受光部と、レーザ光の各照射位置間の距離が所定値以上になる様に設定された、レーザ光の投光タイミングを光源部に指令する光源制御部と、レーザ光の投光及び受光タイミングに基づいて物体の距離を計測する測距部と、設定されている駆動周波数と投光タイミングとを共振周波数に合わせて変更する変更手段と、を備える。
(もっと読む)
レーザーの試験をすることに光学的なアイソレーターを使用するためのシステム及び方法
一つの実施形態に従った、方法は、パルス検出器で第一の光学的な信号を受信することを含む。第一の光学的な信号の電子的なパルスは、光学的なモジュールで受信される。第二の光学的な信号は、電子的なパルスに基づいた光学的なモジュールで発生させられる。第一の光学的な信号の少なくとも一部分は、光学的なイソレーターで逆の方向において受信されると共に、第二の光学的な信号は、光学的なアイソレーターで前進の方向において受信される。光学的なアイソレーターは、実質的に、前進の方向においてターゲットまで第二の光学的な信号を送信する。光学的なアイソレーターは、実質的に、逆の方向において第一の光学的な信号の少なくとも一部分を減衰させる。 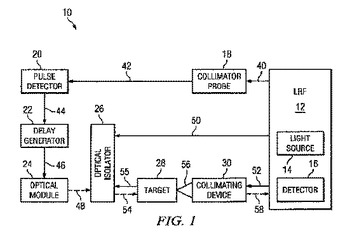 (もっと読む)
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用するとともに、被測定物の2つの測定点間の厚み方向の距離を高精度に測定する測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及レーザ測距装置によれば、測定光を第1測定光と第2測定光とに分割し、第1測定光を被測定物6の第1測定点S1に照射した上で、第1測定光と参照光との光路長が等しくなる反射点の位置を取得する。また、第2測定光を被測定物6の第2測定点S2に照射した上で、第2測定光と参照光との光路長が等しくなる反射点の位置を取得する。そして、これらの位置に基づいて第1測定点S1と第2測定点S2間の厚み方向の距離を高精度に測定する。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
導波路構造を有する自己混合干渉デバイス
本発明による自己混合干渉デバイスは、集積された光導波路構造(3)を備える基板(1)、該基板(1)の表面上に配置されて、前記表面へ向けてレーザー放射線を放出する半導体レーザー光源(2)、及び、該半導体レーザー光源(2)の強度変化を検出するように備えられた光検出器を有する。前記光導波路構造(3)は、前記半導体レーザー光源(2)と光学的に接続し、かつ、前記半導体レーザー光源(2)により放出されるレーザー放射線を、前記基板(1)の表面の射出光結合領域へ導光し、かつ、前記基板(1)の外部の標的対象物(4)から散乱されるレーザー放射線の一部を、前記前記半導体レーザー光源(2)へ再入射するように導光するように設計される。当該自己混合干渉デバイスは、既知の自己混合干渉デバイスよりも全体の高さを低くすることが可能である。  (もっと読む)
(もっと読む)
テラヘルツレーダ装置
【課題】短時間で距離の測定ができるテラヘルツレーダ装置を実現すること。
【解決手段】モード同期周波数制御手段12によってフェムト秒レーザ10、11のモード同期周波数を安定させ、モード同期周波数の差を一定とする。フェムト秒レーザ10からのポンプ光を光伝導アンテナ13に入射させ、テラヘルツコムを発生させる。一方、フェムト秒レーザ11からのプローブ光は、光伝導アンテナ14に入射させ、光伝導アンテナ14に測定物Xにより反射されたテラヘルツコムを入射させることにより、RFコムを発生させる。このRFコムのコムモードを位相差計17により抽出し、抽出したコムモードの位相を測定することにより、測定物Xまでの距離を算出する。複数のコムモードを選択、抽出することで、高ダイナミックレンジな測距が可能となる。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
追尾式レーザ干渉測長計
【課題】回転機構の回転角度を適切に取得することができる追尾式レーザ干渉測長計の提供。
【解決手段】追尾式レーザ干渉測長計1は、第1の再帰反射体としての測定基準器2と、被測定物Wに取り付けられる第2の再帰反射体としてのターゲット3と、測定基準器2にレーザ光源から出射される光を導くとともに、測定基準器2にて反射された光を出射する本体部4と、測定基準器2を中心として本体部4を回転させる回転機構5と、回転機構5を制御する制御装置6とを備える。本体部4は、測定基準器2にて反射された光を受光し、受光した光の位置を検出する二次元PSDを備える。制御装置6は、回転機構5の回転角度を取得する角度取得部63と、二次元PSDにて検出される光の位置に基づいて、角度取得部63にて取得される回転機構5の回転角度を補正する角度補正部64とを備える。
(もっと読む)
161 - 180 / 516
[ Back to top ]