
Fターム[5J084BA03]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039)
Fターム[5J084BA03]の下位に属するFターム
半導体レーザ (523)
Fターム[5J084BA03]に分類される特許
201 - 220 / 516
障害物検出装置
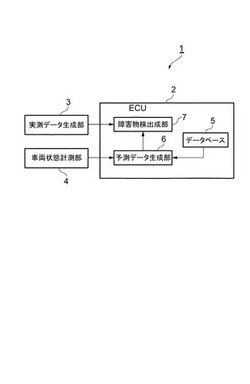
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
受光装置、情報取得装置および物体検出装置

【課題】フィルタの傾きの変化によって生ずる入射光の焦点ずれを抑制することができる受光装置、情報取得装置および物体検出装置を提供する。
【解決手段】情報取得装置1は、レーザ光源11から出射され目標領域から反射されたレーザ光を受光して信号を出力するCMOSイメージセンサ17と、レーザ光をCMOSイメージセンサ17へと導く受光光学系とを備える。ここで、受光光学系は、フィルタ15を具備する。フィルタ15は、レーザ光の進行方向に対して傾けられることにより透過波長帯域がシフトする。さらに、受光光学系は、フィルタ15の傾きの変化に伴う当該フィルタ15内での光路長の変化を補償するための透過板16を具備する。
(もっと読む)
目標検出装置及び目標検出方法
【課題】低熱源目標を容易にかつ確実に検出可能な目標検出装置を提供する。
【解決手段】赤外線カメラ12の視野内に、光学装置11から赤外線レーザビームを放射してカメラ視野範囲を走査していき、低熱源目標Tに当たって反射する赤外線レーザビームの反射光を赤外線カメラ12に入射して目標情報検出器14により低熱源目標Tを検出するようにしている。
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
時間計測回路
【課題】TAC方式を使用する時間計測回路、またはTAC方式とパルスカウント方式を組み合わせた時間計測回路において、測定精度を向上させるとともに、デッドタイムのない回路構成を提供する。
【解決手段】入力信号Viの振幅の最大値を検出してトリガTRGを出力するピーク検出回路5と、測定開始信号Vgに応答して動作する3個以上の複数のアナログ信号発生部1〜4と、アナログ信号発生部1〜4の動作タイミングを制御する制御部6と、トリガTRGの出力時点におけるアナログ信号発生部の少なくとも1つの出力電圧を用いて、測定開始信号Vgの出力時刻を起点としたトリガTRGの出力時刻を算定する算定部7とを備えている。
(もっと読む)
正反射面の相対位置を測定する方法及び装置
【課題】測定線に沿う物体34の正反射面の相対位置を測定する方法において、正反射面の傾斜角の許容範囲を広くする。
【解決手段】 (a)少なくとも1本の集束光ビーム38を測定線上の公称位置40に集束させ、正反射面からの反射ビーム44を形成する。(b)検出器平面50における反射ビーム44の像を記録する。(c)検出器平面50内の反射ビーム44の像の位置を決定する。(d)その反射ビームの像の位置を測定線に沿う公称位置40からの正反射面の変位に変換する。工程(a)において、複数本の集束光ビーム38を公称位置40に集束させることが好ましい。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
追尾式レーザ干渉測長計
【課題】入射面のゴミの影響を受け難く、基準球の表面の傷に対してロバストであり、基準球の局所的な真球誤差の影響を受け難くする。
【解決手段】固定位置に配設された透明な基準球614と、移動体に配設された再帰逆反射体(620)と、基準球の中心を中心として回動するように設計されたキャリッジ630と、キャリッジに固定配設され、再帰逆反射体と基準球の間でレーザビーム(642)を往復させる光学系を含み、再帰逆反射体と基準球の間の距離を干渉測長する測長手段(640)と、キャリッジに固定配設され、再帰逆反射体の入射光と反射光の光軸のずれ量に応じた信号を出力する追尾用位置検出手段660と、光軸のずれ量がゼロとなるようにキャリッジの回動を制御する制御部670とを備えた追尾式レーザ干渉測長計において、基準球に入射されるレーザビームが、基準球の中心Oに焦点を結び、入射側と反対の内側球面で反射されるようにする。
(もっと読む)
車両用物体検知装置
【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
ジェスチャ認識に基づく制御装置及び制御方法
【課題】外乱光にロバストで、容易かつ精度良く被検出対象物を検出可能な、ジェスチャ認識に基づく制御装置及び制御方法を提供すること。
【解決手段】本発明に係るジェスチャ認識に基づく制御装置は、検出平面2内に存在する被検出対象物4までの距離を測定するレーザレンジセンサ1と、測定した距離から被検出対象物4の存在位置を検出する存在検出手段と、検出した被検出対象物4の存在位置の時系列データから、被検出対象物4の動きを検出する動作検出手段と、被検出対象物4の動きからジェスチャを抽出する動作解釈手段と、抽出したジェスチャに応じた制御指令を生成して被制御対象機器5へと与えるジェスチャ認識制御手段と、を備える。
(もっと読む)
測距装置
【課題】 可視光に色味の劣化の影響を与えずに光束を分別できる測距装置を提供する。
【解決手段】 測距装置は、測定光を照射する測定光源(1)と、対物レンズ(3)と、接眼レンズを有する視準光学系(6〜9)と、対物レンズの光軸に垂直な平面と平面及び対物レンズの光軸に傾斜する第一傾斜面とを有する光路分別部材(2)と、光路分別部材を介して目標物から反射された測定光を受光する受光素子(4)と、を備える。第一傾斜面は、視準光学系で使用する光の波長と測定光の波長とをそれぞれ分別する波長分別機能を有し、以下の条件を満足する。
(Sin−1(1/n)+Sin−1(1/n(SinθFNO)))/2<θ1<30°
θ1:対物レンズの光軸に対して垂直な平面と前記第一傾斜面とのなす角度;
FNO:対物レンズFナンバー;
θFNO:θFNO=tan−1(1/2FNO);
n:光路分別部材を構成する部材の測定光の波長の屈折率。
(もっと読む)
車両渋滞検出装置
【課題】車両の渋滞の末尾位置を精度良く検出することが可能であり、光量の少ない環境でも渋滞を検出することが可能であり、さらに従来よりも短い時間毎の渋滞を検出することが出来る車両渋滞検出装置を提供することを目的とする。
【解決手段】車両渋滞検出装置が、所定の領域を走査するレーザレーダセンサと、レーザレーダセンサの検出結果に基づく距離情報と、レーザレーダセンサの走査方向の情報とからレーダ情報を生成し、レーダ情報から所定の領域内に存在する車両を検出し、進行方向側の車両から進行方向逆側の車両までを順番に渋滞車両であるか否か判定し、車両が渋滞車両であると判定した場合に当該車両の位置を渋滞末尾位置として指定することによって進行方向逆側末尾の渋滞車両の位置を渋滞末尾位置として最終的に指定する制御部を具備する。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
レーザレンジセンサのタイムスタンプ機能付加装置
【課題】本発明は、光を走査させ、その反射光を検出することにより、走査範囲にある測定対象物までの距離を測定するレーザレンジセンサにタイムスタンプ機能を付加するタイムスタンプ機能付加装置に関し、レーザレンジセンサに高精度のタイムスタンプ機能を容易に追加することができるレーザレンジセンサのタイムスタンプ機能付加装置を提供することを目的とする。
【解決手段】光を走査させ、その反射光を検出することにより、走査範囲にある測定対象物までの距離を測定するレーザレンジセンサで測定された測定データにタイムスタンプ情報を付加するタイムスタンプ情報機能装置であって、レーザレンジセンサに取り付けられ、レーザレンジセンサから出射される光を検出し、検出信号を出力する検出部と、レーザレンジセンサに取り付けられ、検出部から出力された検出信号に基づいてレーザレンジセンサにタイムスタンプ機能を追加するアタッチメント本体とを含む構成とされている。
(もっと読む)
距離測定装置
【課題】発振器の周波数にゆらぎが生じても、ビートダウンした処理信号間の位相差から距離を測定する。
【解決手段】距離測定装置は、レーザ光束として光周波数コムを発生するレーザ装置1と、基準光27を受光する基準受光部3と、測距光28を受光する測定受光部6とを備える。第1ミキサ31および第2ミキサ32は、測定受光部6および基準受光部3の受光信号と特定の周波数を持つ発振器50の周期信号とを乗算する。第4フィルタ51および第5フィルタ52は、第1ミキサ31および第2ミキサ32で生成された信号成分から異なる周波数成分を抜き出す。第4フィルタ51および第5フィルタ52で抜き出された信号は、第3ミキサで乗算され、差の周波数成分が第6フィルタ54で抜き出される。位相差測定部12は、第6フィルタ54および第2フィルタ11からの2つの処理信号の位相差を測定し、距離測定部17は、その位相差から距離を測定する。
(もっと読む)
歩行者検出装置
【課題】的確に歩行者を検出する歩行者検出装置を提供する。
【解決手段】3次元位置情報取得部11は、車両の周辺の3次元位置情報を時系列順に取得する。解析部12は、各時刻における前記3次元位置情報を車両が位置する平面上の点群として表現し、時系列に沿ってその点群の分布変化の周期性を解析する。解析部12により周期性があると判定された際には、その点群を歩行者として検出する。
(もっと読む)
レーザレーダ及びレーザレーダの運用方法
【課題】稼働状況に合わせた適切なメンテナンスを行うことが可能であるレーザレーダ及びレーザレーダの運用方法を提供する。
【解決手段】交差点Aに対してレーザ光LTを二次元的に走査し、このレーザ光LTの走査で得られる交差点A内における多数の計測点距離情報に基づいて、交差点Aの三次元情報を取得する検出部10と、検出部10で取得した三次元情報に基づいて、交差点A内に存在する車両Cを検出して出力する判定部20と、判定部20で取得したデータを蓄積可能なサーバSに対して公衆回線を用いて送信する公衆回線通信部30と、温度や湿度等の設置環境情報を収集する動作環境情報収集部40と、各構成部の稼働時間等の運用情報を収集する運用情報収集部50と、レーザレーダ1に対する外部からの操作履歴や発生したトラブル等の履歴情報を収集する履歴情報収集部60を備えている。
(もっと読む)
距離測定装置
【課題】ターゲットからの複数の散乱光を受光して距離を測定する場合にカウンタ数が多くなり演算処理が複雑化する。
【解決手段】コンパレータ1はレーザ光に伴う送光パルスからスタートパルスを生成し、コンパレータ2はN個のターゲットからの各受光パルスを2値化しNビットデータとして出力する。測距回路5はスタートパルスとNビットデータの内で一番早く“1”となるストップパルス間の時間を計測し基準時間として出力する。遅延線6はターゲットに対する所望の遅延ステップでストップパルスを遅延させた遅延パルスを距離分解能対応の数Mだけ出力する。ラッチ回路7はNビットデータをストップパルスおとび各遅延パルスでラッチし遅延データとして出力する。
(もっと読む)
201 - 220 / 516
[ Back to top ]