
Fターム[5J084BA03]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039)
Fターム[5J084BA03]の下位に属するFターム
半導体レーザ (523)
Fターム[5J084BA03]に分類される特許
141 - 160 / 516
移動体
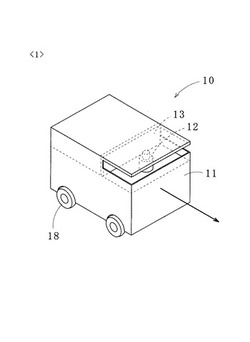
【課題】外部に補正用の基準部材を設置することなく、物体の位置を測定するセンサの取り付け角度ずれに起因する誤差を補正することが可能な移動体を提供する。
【解決手段】車体11に搭載され、走行上計測を必要とする物体が存在する第1の領域及びその他の第2の領域を計測領域とし、物体の位置を計測するセンサ12と、車体11に設けられ、第2の領域の予め決められた位置に配置された基準部材13と、センサ12が計測した基準部材13の位置と予め決められた位置とに基づいて、センサ12の取り付け角度ずれに起因する誤差を補正する補正部22を有し、車体11の移動を制御する制御装置14とを備える。
(もっと読む)
変位センサ

【課題】測定部位毎の態様が急変しても、安定して適切な測定を行うことができる変位センサを提供する。
【解決手段】フィードバック回数設定部19及び制御部16にて1出力周期において複数回の調整の設定がなされると、制御部16はその最後のフィードバック調整後の測定値信号の出力を行い、受光信号が安定するまでの過渡期における測定値の排除が行われる。
(もっと読む)
目標追跡装置
【課題】安定して反射体を検出することができる目標追跡装置を提供すること。
【解決手段】複数の出射パルスが一定の間隔で出射されるパルスレーザ装置12および出射パルスの波長域に感度を有する撮像装置13が、これらの各指向方向を一致させて備えるとともに、撮像装置13によって得られる画像情報に基づいて生成された指向制御信号に応じて、パルスレーザ装置12および撮像装置13を適宜指向させる指向装置11を具備する目標追跡装置であって、撮像装置13に入射される反射パルスのうち、画像情報から反射体を抽出可能な強度の反射パルスのみを撮像するように撮像装置13を制御する感光タイミング制御部18を具備する。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
光走査装置及び距離測定装置
【課題】反射面を備えた回転反射体の回転軸の傾斜角φが0°の場合に比べて、反射面で反射された走査光による走査軌跡をより柔軟に設定することができる、光走査装置及び距離測定装置を提供する。
【解決手段】基準方向及び基準方向と直交する方向とは異なる方向に光を射出する光源と、回転軸に斜めに交差し且つ光源から入射角θで入射した光を反射する少なくとも1つの反射面を有し、基準方向に対し傾斜角φで傾けられた回転軸の周りに回転する回転反射体と、を備えた光走査装置である。基準方向と予め定めた角度で交差する方向を所定の走査方向として、回転軸の傾斜角φ≠0°で、且つ反射面で反射された走査光の所定の走査方向に対する偏差が回転軸の傾斜角φ=0°で得られる走査光の所定の走査方向に対する偏差より小さくなるように入射角θに応じて前記傾斜角φが予め設定されている。
(もっと読む)
距離測定装置
【課題】測定範囲の拡大や分解能の向上が容易に行え、且つ、被測定物の傾斜角度の検出が可能な、自由度の高い構成の距離測定装置を提供することを目的とする
【解決手段】被測定物7の基準表面に対してその鉛直方向から、予め設定する間隔で2つのレーザビームを照射する光源部1aと、被測定物の表面で反射した2つのレーザビームの反射光を予め定める受光角度で受光するカメラ1cと、光源部とカメラとを固定するベースとを備える距離検出部1と、基準表面の鉛直方向の位置と、カメラで検出した当該2つのレーザビームの位置とを予め対応付けした校正テーブルを記憶し、カメラで検出した2つのレーザビームの位置から、基準表面と被測定物の表面との距離を求める距離演算部2とを備え、距離演算部は、2つのレーザビームの数と夫々のレーザビームに対応する校正テーブルを参照して異なる分解能で夫々の距離を求めるようにしたことを特徴とする距離測定装置。
(もっと読む)
光学式センサ汚損防止装置
【課題】汚れ防止のために光学式センサの前方に発生させるガスの流量を、汚損物サイズに応じて変化させることが可能な光学式センサ汚損防止装置を提供すること。
【解決手段】光学式センサ10の前方にガス流SBを発生させるガス流発生手段30を備える構成とし、光学式センサ10の前方を飛来する汚損物Pの大きさを検出する汚損物サイズ検出手段10を設ける。検出された汚損物Pの大きさに応じて、ガス流発生手段30によるガス流SBの流量を変化させるガス量調節手段20,30を備える構成とする。そして、汚損物Pのサイズが大きい場合に、ガス流SBの流量を増加することで、汚損物Pが光学式センサ10に付着することを防止する。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
計測車両、道路地物計測システム
【課題】移動体にレーザレーダを搭載して地面や壁面に照射し、移動しながら目標物の位置を計測しようとする場合、複数のレーザレーダを用いることは多いが、レーザレーダを単に平行に並べて設置すると、移動速度によって計測点の密度にムラが発生したり、走行に平行な方向と垂直な方向とで計測点の密度差が大きい、という問題があった。
【解決手段】レーザレーダ同士に角度を持たせて設置することにより、計測点の密度のムラや方向による密度差の大きさを軽減することができる。
(もっと読む)
物体検出装置
【課題】 本願は、物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】 本願の物体検出装置10は、2次元走査型の距離計測センサ12と、距離計測センサの出力に基づいて物体を検出する演算装置と、を備えている。距離計測センサ12は、計測対象となる物体36に応じて設定された測定高さH0より低い位置HLに設置されている。また、距離計測センサ12は、距離計測センサ12がセンサ正面を計測するときの距離計測方向θが水平面Pに対して斜め上方を向くように設置されている。
(もっと読む)
一体型レーザ/赤外/可視前方監視装置
【課題】 近年、目標の補足や追尾等を目的として、レーザ、赤外、可視の3種類センサを搭載した前方監視装置が航空機、船舶、陸上車両等に搭載されている。この前方監視装置においては、それぞれのセンサについて更なる高感度化と光軸の高精度の一致が求められている。
【解決手段】 一体型前方監視装置の最も目標側に可視透過、レーザ/赤外反射の可視/レーザ・赤外分離板1を設け、可視/レーザ・赤外分離板1の後段に可視カメラ2を設置する。これにより可視の透過率が向上し、レーザ/赤外共用系においても可視を透過する必要がなくなるため材料の自由度が増して、レーザ光や赤外光の透過率向上や結像性能向上を図ることが可能となる。また、可視/レーザ・赤外分離板1と可視カメラ2を一体としたピッチ回転軸とすることで光軸を高精度かつ安定して一致させることが可能となる。
(もっと読む)
水中距離計測システム
【課題】水中浮遊物がレーザー光である伝送路上に存在しても、これの影響を最小限にすることにより、計測可能な距離を長くとることができ、更に安定して距離計測することができる水中距離計測システムを提供する。
【解決手段】第一の水中機器103と第二の水中機器123間の距離を計測する水中距離計測システムであって、第一の水中機器103は、送信レーザー光を送信する第一のレーザー送信機A104、送信レーザー光が水中浮遊物により反射された反射送信レーザー光を受ける第一のレーザー受信機C109、及び反射送信レーザー光の光量により送信レーザー光のビーム口径を変化させる第一のビーム口径可変部A105を備え、第二の水中機器123は、送信レーザー光を受信し、送信レーザー光を受信したことを示すタイミング情報を発生する第二のレーザー受信機A126を備えている。
(もっと読む)
レーザセンサ装置
【課題】簡単な構成で、装置の姿勢変化を検出できるようにする。
【解決手段】装置本体ケース2には、侵入検出用レーザ照射口11の反対側にレーザ通過口12が形成されている。建物の壁14におけるレーザ通過口12と対向する部位には姿勢変化検出用シール3が装着される。レーザ照射部5から照射されたレーザ光は、回転ミラーで展開され、レーザ通過口12を通してシール3をスキャンしてレーザ受光部6により受光される。制御装置10は、レーザ通過口12を通して戻ってくるレーザ光がレーザ受光部6で受光されると、このレーザ受光パターンを当該展開周回とこれ以前での展開周回とで比較し、同じであれば姿勢変化無しと判断し、異なれば姿勢変化有りと判断する。
(もっと読む)
異物検出装置
【課題】同一捜索時間における異物の3次元形状の検出精度を向上できる異物検出装置を得る。
【解決手段】捜索対象にレーザ光を照射したときの散乱光を用いて異物を検出する異物検出装置であって、レーザ光を出力する光出力手段と、レーザ光を用いて捜索対象の捜索範囲を走査するスキャナ11と、捜索対象からの散乱光を受光する光受信機13と、レーザ光と散乱光の位相差及び散乱光の受信強度を検出する位相検波器14と、これらの検出結果に基づいて捜索範囲を絞り込んで着目領域23を抽出し、スキャンする走査線間隔を狭くしてスキャナ11に着目領域23を再走査させる制御信号を出力し、この着目領域23における位相検波器14の検出結果に基づいて3次元画像を生成するパソコン3とを備える。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】小型化、低コスト化を実現できるとともに、受光感度がよくて距離測定精度の高いレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置10は、装置本体を構成するベースフレーム12と、ベースフレーム12の所定位置に固定され、レーザ光を出射する光源14と、光源14からの出射光を図示しない対象物に向けて走査する光走査装置16とを有している。光走査装置16はリコン基板から半導体微細加工法により可動板(反射ミラー)やトーションバー等が一体に形成されており、可動板の中央部にはフォトダイオードが一体に形成されている。対象物からの反射光22は、光学部品を介することなく直接フォトダイオードにより受光される。
(もっと読む)
地表面観察方法
【課題】レーザによる計測のみで土地被覆を判断し、さらに、必要に応じて、土地表面形状を求めることのできる地表面観察方法の提供を目的とする。
【解決手段】飛行体1から地上への多波長のレーザ掃引によって地上から反射した異なる波長成分を有する適数の反射パルスを判定単位として、各判定単位における波長-反射強度分布を基準に判定単位群を適数に分類し、
各判定単位に物性に関連付けられた狭域属性2を付与して土地被覆状態を観察する。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、レーザ光を前記目標領域に向けて投射する投射光学系10と、前記目標領域からの反射光を受光して信号を出力するCMOSイメージセンサ125とを有する。レーザ光が出射されたときにCMOSイメージセンサ125から出力される第1の撮像データから、レーザ光が出射されていないときにCMOSイメージセンサ125から出力される第2の撮像データが減算され、減算結果が、メモリ25に記憶される。3次元距離演算部21cは、メモリ25に記憶された減算結果に基づいて、3次元距離情報を演算し取得する。
(もっと読む)
距離測定装置
【課題】測距対象物の誤認識を防止することができる距離測定装置を提供する。
【解決手段】距離測定装置10は、垂直方向に隣接する計測点までの水平方向の距離差が閾値より小さい場合に、所定の高さを有する測距対象物が存在すると判定する距離測定装置において、任意の測定点に対して距離を測定する測距部1と、測距部1による測定誤差、及び計測点の候補を記憶する記憶部2と、記憶部2により記憶された計測点の候補の中から、記憶部2により記憶された測定誤差による距離差の最大値よりも閾値の方が大きくなるものを計測点として選択決定する選択部3と、を備える。これにより、所望の測距対象物であっても測定誤差のために測距対象として判定されず誤認識してしまうことを防止することが可能になる。
(もっと読む)
物体識別方法及び物体識別装置
【課題】反射物体が存在する場所においても、物体の誤認識を抑制することができる物体識別方法及び物体識別装置を提供する。
【解決手段】物体識別装置1は、車両前方の物体にレーザ光を照射し物体からのレーザ光の反射状態によって物体との距離を測定するレーザ装置3と、少なくとも上記レーザ光の波長帯域の光を受光させるフィルタ部5aを備えたカメラ5と、レーザ装置3で対象物との距離を測定すると共に、レーザ装置3のレーザ光の照射方向に撮像方向を略一致させてカメラ5で撮像を行い、カメラ5がレーザ光の照射軌跡を認識した場合には、レーザ装置3で測定された対象物との距離値を無効にする。
(もっと読む)
141 - 160 / 516
[ Back to top ]