
Fターム[5J084BA03]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | 光源の種類に関するもの (1,162) | レーザ光源 (1,039)
Fターム[5J084BA03]の下位に属するFターム
半導体レーザ (523)
Fターム[5J084BA03]に分類される特許
81 - 100 / 516
波長走査干渉計
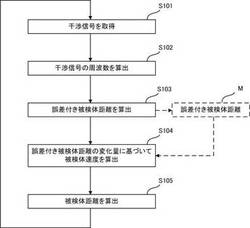
【課題】移動する被検体までの絶対距離を高精度に計測するために有利な波長走査干渉計を提供する。
【解決手段】波長走査干渉計は、光源から射出される光束の波長を変更しながら該光束から分割された参照光と被検光との干渉光の信号に基づいて被検体までの絶対距離を計測する。波長走査干渉計は、前記光源から射出される光束の波長が互いに等しい時刻である第1時刻およびその後の第2時刻と、前記第1時刻、前記第2時刻のそれぞれにおける前記干渉光の信号の周波数である第1周波数、第2周波数とに基づいて、前記被検体の移動による誤差成分が低減された絶対距離を算出する処理部を備える。
(もっと読む)
距離速度測定装置

【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
空間計測システム及び計測方法、並びに昇降機制御システム
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
光学情報読み取り装置
【課題】読み取り速度を向上させることができる光学情報読み取り装置を提供する。
【解決手段】光学情報読み取り装置から撮像対象物の複数の点までの距離を測定し(ステップS1)、測定した距離に基づいて、受光センサが撮像した画像を複数の領域に分割する(ステップS2)。そして、分割した領域から読み取り領域を絞り込む(ステップS3)。距離により画像を複数の領域に分割することから、輝度変化やエッジに基づいて領域を分割する場合と異なり、QRコード(登録商標)に起因する輝度変化以外の種々の輝度変化が撮像対象物にあってもその影響を受けない。よって、QRコードを含む領域に精度よく絞り込むことができ、その後の読み取り処理をやり直す場合が低下するので、読み取り速度が向上する。また、領域の絞り込みの精度が向上することから、情報の読み取り精度も向上する。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
光符号変調パルスの相関処理方式
【課題】光符号変調パルスの相関処理方式におけるサイドローブ雑音を低減すること。
【解決手段】光周波数シフタ12により光ファイバ1のブリルアン周波数シフトと同程度ダウンシフトされた連続光と、光変調器3により相関符号系列信号発生器13からの相補相関符号変調信号で変調されたポンプ光とが光ファイバ1中で干渉して発生する音波によってブリルアン増幅された前記連続光の受信信号を処理する際、相補相関符号系列信号A1(t)及びその要素を交換したA1-(t)による応答信号RA1(t)及びRA1-(t)の差信号ΔRA1(t)にステップ応答関数h(t)の逆数g(t)を乗じて音波の減衰を補正したA1(t)g(t)とΔRA1(t)との相互相関処理をした結果と、同じく相補相関符号系列信号B1(t)及びB1-(t)による応答信号RB1(t)及びRB1-(t)の差信号ΔRB1(t)にg(t)を乗じたB1(t)g(t)とΔRB1(t)との相互相関処理をした結果を合成する。
(もっと読む)
レーザレーダ装置およびレーザ合成開口レーダ装置
【課題】レーザレーダ装置(ライダ装置)において、測定可能距離を長くすると共に、距離測定分解能を向上させることを目的とする。
【解決手段】時間変化に対し周波数が変化する検出用信号を生成する検出用信号生成部12と、検出用信号によって発振光を変調するレーザ発振・変調部14と、レーザ発振・変調部14によって変調されたレーザ光を送信する送信光学系17と、レーザ反射光を受信する受信光学系18と、受信されたレーザ反射光に対し復調を行う復調部20と、復調された復調信号とのタイミングを、レーザレーダ装置10の位置に応じて調整する遅延時間設定部24と、遅延時間設定部24によってタイミングが調整された参照用信号を生成する参照用信号生成部13、および参照用信号と復調信号との差異を示す差異信号を生成する差異信号生成部22と、差異信号に基づいて、目標物の情報を取得する情報記録・処理部30とを備える。
(もっと読む)
障害物検知装置
【課題】表面状態の検出を可能とし得て、しかも、障害物とレーザとの間に設けた出射面の表面状態をリアルタイムに検出することができ、その表面状態に対応したレーザ光を照射する障害物検知装置を提供する。
【解決手段】本発明は、レーザ光源2と、レーザ駆動部3と、レーザ光源2から照射されたレーザ光をビーム偏向するビーム偏向素子4と、電圧制御部5と、出射面9と、受光面10と、検出器7と、コントロール部6と、を備え、ビーム偏向素子4の偏向角の一部のレーザ光を利用して出射面9の表面状態を計測するように出射面9に対して斜めから入射する反射ミラー11,12,13と、出射面9で反射したレーザ光を受光する検出器8と、を備え、コントロール部6は、電圧制御部5での電圧制御により出射面9の表面状態を計測した後に出射面9を透過する前方検出用のレーザ光を出力する。
(もっと読む)
航空機搭載用大気浮遊物質検知ライダー
【課題】本発明の目的課題は、航空機が飛行中に前方の氷晶や火山灰等に代表される大気中の浮遊物質を検知する装置を提供することにある。
【解決手段】本発明の大気浮遊物質検知方法は、レーザ光を利用した航空機搭載ドップラーライダーにおいて、レーザ光を大気中に放射する送信光と遠隔領域の大気浮遊物質によって散乱された受信光との偏波面の角度差からレーザ光を反射散乱させた物質の成分を遠隔計測することを特徴とする。
(もっと読む)
歩行者検出装置
【課題】検出点群から歩行者を高精度に検出する歩行者検出装置を提供することを課題とする。
【解決手段】検出手段によって検出された検出点を複数の検出点群としてグループ化し、それらの検出点群D4から歩行者を検出する歩行者検出装置であって、検出点群D4毎に検出点群D4の移動方向(速度ベクトルD5の方向に相当)を検出する移動方向算出手段S5と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7を算出する分布情報算出手段S7と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7の時間変化に周期性があるか否かを判定し、周期性がある検出点群を歩行者と判定する判定手段S9とを備えることを特徴とする。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
距離測定装置および距離測定方法
【課題】光ビームを測定対象物に照射して測定対象物までの距離を測定する距離測定装置および距離測定方法において、光ビームの照射ができない範囲が無く、従来に比べて捜査範囲を広くする。
【解決手段】光ビームを測定対象物に照射して測定対象物までの距離を測定するとき、距離測定装置は、向きの異なる複数の光ビームのそれぞれをビーム出射部から出射する。このとき、距離測定装置は、反射面上に沿って回転軸を持ち、前記回転軸の周りに軸回転する1つまたは複数の反射ミラーの反射面上の前記回転軸の位置で前記複数の光ビームを反射させることにより、測定対象物に前記光ビームのそれぞれを照射させる。距離測定装置は、前記光ビームの照射により測定対象物で反射して戻ってきた反射ビームを前記反射ミラーで反射させて受光し、受光した前記反射ビームを用いて、測定対象物までの距離情報を求める。
(もっと読む)
位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラム
【課題】専用の部材を取り付けなくても、ロボットであることを識別することができる、位置情報制御システム、位置情報制御装置、位置情報制御方法、及び位置情報制御プログラムを提供する。
【解決手段】第1の位置情報取得部2は、物体の第1の位置情報を取得し、第2の位置情報取得部302は、移動体の移動に基づく第2の位置情報を取得し、位置情報認識部303は、前記物体の第1の位置情報の時系列と前記第2の位置情報の時系列とを照合し、前記第2の位置情報の時系列が合致する前記物体の第1の位置情報の時系列を、移動体の位置情報の時系列と認識する。
(もっと読む)
ビーム照射装置
【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
レーザレーダ
【課題】迷光が入射される場合にも、回路規模の増大を招くことなく、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光の反射光を受光する光検出器33と、光検出器33を移動させる光検出器駆動部34を有する。光検出器駆動部34は、光検出器33を反射光の入射位置に移動させる。光検出器33を反射光の入射位置に移動させることにより、複数の光検出器および回路部を用いずに、反射光を精度よく検出することができる。
(もっと読む)
81 - 100 / 516
[ Back to top ]