
Fターム[5J084BA50]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 2次元走査を行うもの (270)
Fターム[5J084BA50]に分類される特許
261 - 270 / 270
車載用レーダ装置

【課題】 自車前方を走行する先行車両を検出対象物体として検出する車載用レーダ装置の送信波および受信波において高いS/N比を実現する。
【解決手段】 一定時間内に複数回の送信波109を送信する送信部101aと、互いに角度が異なる複数の偏光面の各面が、前記送信部101aの送信波109出力方向に対して一定の角度を保つように設けられた偏光部105aと、前記送信部101aないし前記偏光部105aの少なくとも一方を他方に対して相対移動させることで、前記送信波109の出力方向に存在する前記偏光面を切り替える駆動部201と、前記偏光部105aにより偏光された前記送信波109に対応する反射波111を受信した際に、該反射波111に基づいた受信信号を出力する受信部110aと、前記受信部110aが受信した反射波111を前記偏光面単位で積算する積算部117aとを備える。
(もっと読む)
人数検出装置及び方法

【課題】 人物の人数を比較的簡単な信号処理によって精度良く判定する。
【解決手段】
所定の監視領域に存在する人物の人数を検出する装置であって、監視領域にレーザ光を走査状に照射すると共に該レーザ光の反射光を検出することにより、監視領域の各位置における距離情報を取得するレーザセンサと、各位置における距離情報に基づいて監視領域に存在する人物の人数を判定する人数判定部とを具備する。
(もっと読む)
レーザ距離監視システム
【課題】距離計測に使用される投射光の標的への照準合せが簡単かつ容易に行え、投射光の標的外れをなるべく少なくして、距離監視装置の駆動機構の摩耗や不具合を防止し、電力消費を抑えることができるレーザ光距離監視システムを提供する。
【解決手段】所定の反射領域を有し、該反射領域に入射したレーザ光をその入射方向と略同一方向に反射する平板状の反射体12が標識の支柱などに取り付けられて設置される。この観測点から一定の距離を置いてレーザ距離計測器10が設置されており、前記反射体12と協働して該観測点までの距離を計測する。測定対象物1における観測点が急激に大きく変位して投射レーザ光が当該レーザ距離計測器10の測定範囲から外れ、距離計測が不能に陥った場合、距離計測器10内の駆動機構により投射レーザ光を移動させて反射体12からの反射光を検出して測定対象物1を補足する。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
画像処理装置
【課題】対象空間での光量変化の影響を受けずに対象物を抽出できる画像処理装置を提供する。
【解決手段】発光源2は対象空間に光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物で反射され光検出素子1で受光される反射光との対応関係によって対象物Obまでの距離を求め、対象空間の各方向に対応する画素値が距離値である距離画像を生成する。微分処理部5は、距離画像から基準平面に対する勾配方向を表す勾配方向値を画素値とする勾配方向画像を生成する。さらに、対象物判定部6は、勾配方向値を用いることにより対象物と背景の境界付近を抽出する。
(もっと読む)
交通安全システム
車両安全システムが、隣接する車両までの距離を求めるための距離測定装置を備える衝突回避システムを備え、その衝突回避システムは送信機(74)及び受信機(70)を備える。通信システムが、路側端末と通信するために用いられる。通信システムは、その同じ送信機及び受信機をそれぞれ用いて、路側端末との間でデータを送信及び受信する。  (もっと読む)
(もっと読む)
光電検出デバイス
本発明は、光電検出デバイス、特にはレーザ・スキャナに関する。この光電検出デバイスは、好ましくはパルス化された電磁放射線を送信するための送信デバイスと、前記送信デバイスと関連づけられた少なくとも1つの受信デバイスと、前記送信デバイスによって送信される放射線を監視領域内へ誘導し、且つ前記監視領域により反射される放射線を前記受信デバイスに誘導するために使用される少なくとも1つの偏向デバイスと、を備える。上記送信デバイスは、特定の送信経路に沿って放射線をそれぞれ送信する幾つかの(好ましくは2つの)別個の送信モジュールを備える。  (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
車両の周囲にある障害物の輪郭を検出するための方法およびコンピュータプログラム
【課題】本発明は、好ましくは車両の側方領域に組み込まれているセンサ手段(110)によって、走行する車両(200)の周囲にある障害物(300)の輪郭を検出する方法に関する。
【解決手段】発生された反射信号をまず数学的に平均化して、かくて得られた平均化された反射信号から、障害物の実際の位置および障害物の輪郭の実際の形状をより正確に導き出すことができる。 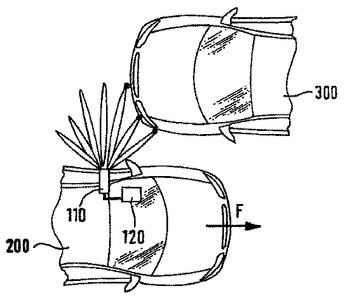 (もっと読む)
(もっと読む)
レーザー周辺認識システム
潜在的脅威を検知するために目標位置の周辺区域をレーザー走査する方法は、周辺区域を横切ってパルス化レーザービームを走査し、パルス化レーザービームからのエコーを受信しそしてシーン画像を形成するために複数の周辺区域走査を形成することよりなる。加えて、目標位置の周辺区域において検知された潜在的脅威を認証する方法は、潜在的脅威を検知し、無線で潜在的脅威に質問し、所定の時間間隔内で応答が送信されない場合、又は受信された応答が適正なアクセスコードを備えていない場合は、潜在的脅威は認証されないと宣言する。  (もっと読む)
(もっと読む)
261 - 270 / 270
[ Back to top ]