
Fターム[5J084BA50]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 2次元走査を行うもの (270)
Fターム[5J084BA50]に分類される特許
61 - 80 / 270
道路端検出装置、運転者支援装置、および道路端検出方法
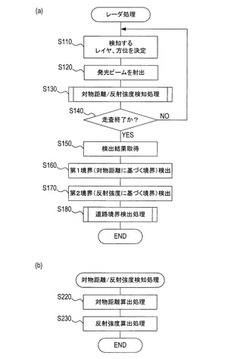
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
信号処理装置、及び走査式測距装置

【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
障害物検知装置及びプログラム
【課題】障害物を精度良く検知することができる障害物検知装置及びプログラムを提供する。
【解決手段】本発明に係る障害物検知装置は、乗り物から測定対象物までの距離を複数の測定点それぞれについて取得する距離取得手段と、前記距離取得手段が取得した各距離のうち、前記乗り物の形状に対応した位置にある1以上の測定点における距離に基づいて、所定の距離内における障害物の有無を検知する検知手段と、を備える。そして、検知手段は、前記1以上の測定点における距離のうち、前記所定の距離よりも近い距離が所定の数以上あった場合に、前記所定の距離内に前記障害物が存在することを検知する。
(もっと読む)
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
物体検出装置
【課題】監視領域がレーザレーダの近辺から遠方まで広く分布する場合であっても、監視領域の物体を正確に検出する。
【解決手段】走査光LB1の主走査方向Xにおいてレーザレーダヘッド5からの距離が遠い監視領域では、反射光LB2の拡散の度合いが大きく、反射光LB2の強度が弱くなる。そこで、主走査方向Xにおいてレーザレーダヘッド5から遠い監視領域に照射した走査光LB1の反射光LB2の方が、近い監視領域に照射した走査光LB1の反射光LB2よりも、ポリゴンミラー11で受光ユニット2に向けて反射された後の光束幅が大きくなるように、ポリゴンミラー11と受光ユニット2とを配置する。これにより、主走査方向Xにおいてレーザレーダヘッド5から遠い監視領域に照射した走査光LB1の反射光LB2の強度が強くなるようにしても、レーザレーダヘッド5から近い監視領域に照射した走査光LB1の反射光LB2の強度は過剰に強くならない。
(もっと読む)
ビーム照射装置
【課題】光検出器からの信号に基づいて検出されたサーボ光の受光位置と理想の受光位置との差分に、迷光や電気的ノイズ等による外乱成分が含まれる場合にも、適正に、レーザ光を目標領域において走査させ得るビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315からの検出信号に基づいて取得されたサーボ光の受光位置と、理想の受光位置との差分を示す差分信号に基づいて、レーザ光が目標領域上の目標軌道を追従するよう、ミラーアクチュエータ100を制御する。また、マイコン7は、差分信号に外乱成分が含まれるエラー期間を検出し、検出したエラー期間において、差分信号に応じて前記レーザ光を前記目標軌道に追従させる制御を停止させる。
(もっと読む)
物体認識装置
【課題】二次元走査タイプの物体認識技術において、送信波の反射によって得られる路面の検出結果(測距データ)が、路面からの反射なのか否かを判定できる物体認識装置を提供する。
【解決手段】測距データを一体化して物標データを生成する際に用いる探索領域内に別レイヤの測距データが存在しないという条件1が成立すれば、非立体物からの測距データであると判定する。測距データを、横軸を距離、縦軸を度数として所定の距離範囲毎のデータ数を表した距離ヒストグラムと、横軸を反射強度として同様に表した反射強度ヒストグラムを考える。「路面反射による測距データであれば発生するであろう度数の閾値」を設定し、距離ヒストグラム、反射強度ヒストグラムのいずれにおいても閾値を超える度数があるという条件2が成立すれば、路面からの測距データである可能性が高い。条件1、条件2が両方成立する場合に、路面からの測距データであるとして、削除する。
(もっと読む)
物体認識装置、及びプログラム
【課題】物体認識装置において、複数個の検出対象が走査方向に沿って近接している場合であっても、各検出対象の認識精度を向上させること
【解決手段】物体認識処理では、測距データ間の差が予め規定された許容値以下となる測距データによって形成される領域に含まれる測距データ群を、一つの候補領域をグループ化する(S130)。当該候補領域の大きさが規定値より大きければ(S150:YES)、当該候補領域を特別候補領域として、この特別候補領域に対応する画像データ上の対象領域に対して画像認識処理を実行し、対象領域中の検出対象の範囲を特定する(S170)。その特定した範囲に基づく検出対象の境界方位に従って、特別候補領域を分割し(S210)、その分割した新たな候補領域を含む全ての候補領域について追跡処理を実行して、候補領域の中で物体として確定すべきものと特定する(S230)。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
時間計測装置および距離計測装置
【課題】アレイ化した場合であっても簡易な構成で高精度の時間計測を行うことができる時間計測装置を提供する。
【解決手段】時間計測装置10は、定電流源11,制御部12,演算部13,容量素子C1〜C3,抵抗器R,スイッチSW0〜SW3,SW11〜SW13を備え、アレイ化されている。制御部12は、発光タイミング信号および受光タイミング信号を入力し、tacoff信号,tac1信号,tac2信号,tac3信号,reset1信号,reset2信号,reset3信号を生成して各スイッチへ与え、スイッチの開閉動作を制御する。演算部13は、スイッチSW1と容量素子C1との接続点の電位Vout1、スイッチSW2と容量素子C2との接続点の電位Vout2、および、スイッチSW3と容量素子C3との接続点の電位Vout3を入力して、電位Vout1〜Vout3に基づいて演算を行う。
(もっと読む)
検知装置
【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
距離測定装置および距離測定方法
【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
光レーダ装置
【課題】構造を複雑化させることなく、回転駆動されるポリゴンミラーの回転中心軸方向における所望の角度でレーザ光を照射させることが可能な光レーダ装置を提供する。
【解決手段】ポリゴンミラー42を設置している設置プレート46の傾き角度を変化させる角度調整機構52、及びポリゴンミラー42を回転駆動するモータ44から角度調整機構52への駆動力の伝達、非伝達を切り替えるクラッチ機構50を設けた。これにより、設置プレート46の傾き角度を変化させるための専用の駆動源を設けることなく、設置プレートの傾き角度を変化させることができ、それにより、垂直方向における検出エリアの位置を調整することができる。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
物体検出装置
【課題】 本願は、物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】 本願の物体検出装置10は、2次元走査型の距離計測センサ12と、距離計測センサの出力に基づいて物体を検出する演算装置と、を備えている。距離計測センサ12は、計測対象となる物体36に応じて設定された測定高さH0より低い位置HLに設置されている。また、距離計測センサ12は、距離計測センサ12がセンサ正面を計測するときの距離計測方向θが水平面Pに対して斜め上方を向くように設置されている。
(もっと読む)
光走査装置及び距離測定装置
【課題】反射面を備えた回転反射体の回転軸の傾斜角φが0°の場合に比べて、反射面で反射された走査光による走査軌跡をより柔軟に設定することができる、光走査装置及び距離測定装置を提供する。
【解決手段】基準方向及び基準方向と直交する方向とは異なる方向に光を射出する光源と、回転軸に斜めに交差し且つ光源から入射角θで入射した光を反射する少なくとも1つの反射面を有し、基準方向に対し傾斜角φで傾けられた回転軸の周りに回転する回転反射体と、を備えた光走査装置である。基準方向と予め定めた角度で交差する方向を所定の走査方向として、回転軸の傾斜角φ≠0°で、且つ反射面で反射された走査光の所定の走査方向に対する偏差が回転軸の傾斜角φ=0°で得られる走査光の所定の走査方向に対する偏差より小さくなるように入射角θに応じて前記傾斜角φが予め設定されている。
(もっと読む)
61 - 80 / 270
[ Back to top ]