
Fターム[5J084BA50]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 2次元走査を行うもの (270)
Fターム[5J084BA50]に分類される特許
21 - 40 / 270
レーザレーダ装置及びレーザレーダ法
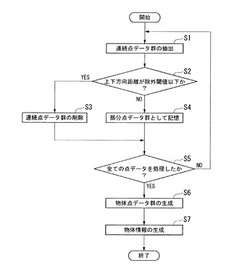
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
距離測定装置

【課題】複数視野を同時に測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定光を射出するレーザ光源と、測定対象物からの反射光を検出する光検出器と、第1の反射鏡、第1の反射鏡の周囲に配置された第1の保持枠、第1の反射鏡を第1の保持枠に対し垂直軸の周りに回転可能に軸支する第1の支持梁、第1の保持枠の下部表面に配置された第2の反射鏡、第1の保持枠の上部表面に配置された第3の反射鏡、第1の保持枠の周囲に配置された第2の保持枠、及び第1の保持枠を第2の保持枠に対し水平軸の周りに回転可能に軸支する第2の支持梁を備えた光走査装置と、レーザ光源から射出された測定光を光走査装置に導光すると共に光走査装置で受光された反射光を光検出器に導光する導光光学系と、レーザ光源及び光走査装置の各々を駆動制御すると共に光検出器の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
レーザセンサ装置
【課題】高速で三次元領域での測定を可能とし、さらに迷光による測定精度の悪化を防止する。
【解決手段】ポリゴンミラー3を収容する収容ケースの内部をレーザ投光器からポリゴンミラー3の反射面に至る第1空間とポリゴンミラー3の反射面から受光器に至る第2空間とに分割する遮光部と、ポリゴンミラー3を回転させることによって測定用レーザ光を第1方向に走査する第1走査部4と、ポリゴンミラー3を第1走査部4による回転の中心軸に対して交差する中心軸を中心として回動させることによって測定用レーザ光を第1方向と交差する第2方向に走査する第2走査部5とを備える。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
レーザレーダ装置
【課題】三次元走査可能なレーザレーダ装置において、水平方向に近い方向にレーザ光を走査する場合に水平方向から外れた方向からの外乱光の影響を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1には、フォトダイオード20(受光手段)で受光可能となる視野範囲を変更可能な視野範囲変更手段が設けられている。この視野範囲変更手段は、集光レンズ62からフォトダイオード20までの経路長さを調整すること視野範囲を変更しており、偏向部41からのレーザ光L1の方向が第1方向(水平方向とのなす角度が相対的に大きくなる方向)に設定されている場合には、視野範囲を相対的に広い第1範囲に設定し、レーザ光L1の方向が第2方向(水平方向とのなす角度が相対的に小さくなる方向)に設定されている場合には、視野範囲を第1範囲よりも狭い第2範囲に設定している。
(もっと読む)
レーザスキャナ及び動体検知方法
【課題】3次元データ内への動体の測定データの混入防止を自動で行うことで、作業効率の向上を図るレーザスキャナ及び動体検知方法を提供する。
【解決手段】投光光軸34に沿って測距光40を射出する投光光学系33と、測距光40を偏向し測定エリアに照射する偏向光学部材と、偏向光学部材を高低方向に回転させる高低角駆動部と、偏向光学部材を水平方向に回転させる水平角駆動部と、測距光40の反射光に基づき測定を行い測定エリアの距離データを求める測距部4と、測定エリアを含む画像データを連続して取得可能な第2の撮像部6と、制御部7とを具備し、制御部7は画像データと距離データとに基づき3次元画像を取得する第1の画像処理部と、時間的に隣接する画像データの比較により動体を検知する第2の画像処理部とを有する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BKと表面1FTとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が表面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と光入射面1BKとの間に位置すると共に、光入射面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
監視方法及び監視装置
【課題】監視範囲が遠距離まで設定されている場合であっても、精度よく監視範囲内における物体を検出することができる監視方法及び監視装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を垂直方向に走査させる垂直スキャナ12と、レーザ光を水平方向に走査させる水平スキャナ13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から物体の距離を算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、を有し、監視範囲Sは水平スキャナ13の上死点又は下死点を基準にして設定され、垂直スキャナ12は水平スキャナ13よりも走査速度が高速に設定されている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が光入射面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と裏面1BKとの間に位置すると共に、裏面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
パノラマ画像作成方法及び3次元レーザスキャナ
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
物体検出ユニット
【課題】物体の誤検出を抑えたい領域と、物体の見逃しを抑えたい領域とが、混在する検出空間に対して、領域毎に、その領域に合わせた物体の検出が行える物体検出ユニットを提供する。
【解決手段】発光部31を発光させて入出口の幅方向に検出波を照射し、受光部32で反射波を検出する。記憶部5、物体の仮検出に用いる受光部32の受光光量の下限を設定する仮検出レベル、および仮検出した物体の本検出に用いる受光部32の受光光量であって、仮検出した物体までの距離に応じて下限を設定する本検出レベルを記憶する。測距部3は、受光部32で検出した反射波の受光光量が、記憶部5に記憶している仮検出レベルを超えているときに、物体を仮検出するとともに、この仮検出した物体までの距離を算出する。制御部2は、本検出レベルを用いて、仮検出した物体が物体であるかどうかを判定する。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
光偏向素子、レーザ装置及びセンシング装置
【課題】小型化が容易で、2方向において大きな偏向角を得ることができる光偏向素子を提供する。
【解決手段】 入射された光を、印加電圧に応じてXY面内で偏向する周期分極反転構造体、及び周期分極反転構造体を通過した光を該光の進行方向を含みXY面に直交する面内で偏向するグレーティングを有する光偏向ユニットが、XY面に直交する方向(Z軸方向)に複数積み重ねられている。そして、該複数の光偏向ユニットにおける各グレーティングの溝周期は、互いに異なっている。この場合は、小型で、2方向において大きな偏向角で光を射出することができる。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
物体検出ユニット
【課題】外乱光や電気的ノイズによる影響を抑え、物体の検出精度を向上させた物体検出ユニットを提供する。
【解決手段】測距部3は、発光部31と、受光部32とを有する。測距部3は、発光部31を発光させ、受光部32で受光した受光光量に基づき物体を仮検出するとともに、ここで仮検出した物体までの距離を算出する。記憶部5が、物体までの距離の変化に応じて受光部32での受光光量の下限閾値を設定する下限パラメータ、および物体までの距離の変化に応じて受光部32での受光光量の上限閾値を設定する上限パラメータを記憶する。制御部2は、受光部32で受光した受光光量が、測距部3が算出した仮検出した物体までの距離において、下限パラメータで決定される下限閾値と、上限パラメータで決定される上限閾値と、の間に位置していなければ、この仮検出した物体を物体でないと判定する。
(もっと読む)
物体検出装置及びこれを備えた車両衝突回避システム
【課題】検出対象物の誤検出が発生しにくい物体検出装置を提供することを課題とする。
【解決手段】探査レーザー光源から照射されるレーザー光を偏向器により走査し、その走査範囲からの反射光の強度に基づいて当該走査範囲内に存在する障害物を検出する物体検出処理を行う。物体検出処理では、走査範囲全域にレーザー光を走査して障害物の一次検出を行い、障害物を一次検出した場合には、障害物の検出箇所を含む所定範囲に走査範囲を限定して再びレーザー光を走査し、これにより検出した反射光の強度に基づいて障害物の2次検出を行う。
(もっと読む)
歩行者検出装置
【課題】検出点群から歩行者を高精度に検出する歩行者検出装置を提供することを課題とする。
【解決手段】検出手段によって検出された検出点を複数の検出点群としてグループ化し、それらの検出点群D4から歩行者を検出する歩行者検出装置であって、検出点群D4毎に検出点群D4の移動方向(速度ベクトルD5の方向に相当)を検出する移動方向算出手段S5と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7を算出する分布情報算出手段S7と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7の時間変化に周期性があるか否かを判定し、周期性がある検出点群を歩行者と判定する判定手段S9とを備えることを特徴とする。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】ミラーの回動精度を保ちつつ、可動部に対する給電を円滑に行い得るミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ1は、支軸24について回動可能なミラーユニットフレーム11と、支軸17に配されたミラー19と、マグネットユニット20とミラーユニットフレーム11とを連結するサスペンションワイヤー26a〜26fと、ミラーユニットフレーム11と支軸17とを連結するサスペンションワイヤー16a〜16dとを備える。サスペンションワイヤー16a〜16d、26a〜26fにより、ミラーユニットフレーム11に装着されたチルトコイル11bと、支軸17に装着されたパンコイル12b、13bに給電でき、ミラーユニットフレーム11と支軸17に対し、一定かつ安定的な抗力が付与される。
(もっと読む)
21 - 40 / 270
[ Back to top ]