
Fターム[5J084BA50]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 2次元走査を行うもの (270)
Fターム[5J084BA50]に分類される特許
141 - 160 / 270
物体検出装置、および光軸ずれ検出方法
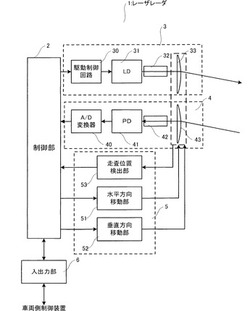
【課題】前方に光を投光する投光部の光軸と、この投光部が投光した光の反射光を受光する受光部の光軸と、のずれを検出することによって、光軸合わせにかかる作業性を向上させることができる物体検出装置を提供する。
【解決手段】投光部3は、LD31と、投光レンズ33との間に、LD31が出射した光を投光レンズ33に導く光導波路を形成する投光側ライトガイド32を有している。投光側ライトガイド32は、投光レンズ33に対向する出射面の平面形状が外周部の外側に突出する突出面を有する形状である。また、受光部4は、PD41と、受光レンズ43との間に、この受光レンズ43を介して受光した光をPD41に導く光導波路を形成する受光側ライトガイド42を有している。受光側ライトガイド42は、受光レンズ43に対向する入射面の平面形状が、投光側ライトガイド32の出射面の平面形状と同じ形状である。
(もっと読む)
レーザトラッカ

【課題】簡単な構成で要求される性能を維持しつつ、測定が中断しても高精度な測定を行うことができ、使い勝手の良いレーザトラッカを提供する。
【解決手段】本体からターゲット106迄の絶対距離を測定する光コム距離計201と、モータ113、115を用いてレーザ光3の方向を変えることのできる2軸の回転機構と、ターゲットと本体との相対的な角度を測定する2軸分の角度測定手段114、116と、光コム距離計が出力する絶対距離のデータと角度測定手段が出力する2軸分の角度データから、ターゲットの空間座標を算出するデータ処理装置110と、ターゲットに入射するレーザ光の光軸と直角方向にターゲットが移動すると、この移動量と移動する方向に応じた信号を出力する光位置検出手段109と、光位置検出手段から出力された信号を用いて、移動量がゼロになるように2軸の回転機構を制御する制御手段111、112とを備える。
(もっと読む)
擬似乱数型パルス列を使うライダーシステム
【課題】レーザーの電力を効果的に増やすよう作用するレーザーパルス列により電力に付随する非線形的影響を減じ、背景ノイズの影響を受けにくいライダーシステムを提供する。
【解決手段】光検出及び測距システムは、複数の光パルスを有する送信光パルスタイミング列30を疑似乱数型タイミングでターゲット36に向けて送信する送信器12を具備する。光学的受信器14は複数の光パルスを有する反射光パルスタイミング列40をターゲット36から受信する。電子制御ユニットは送信光パルスタイミング列30と反射光パルスタイミング列40の間の遅延時間を、送信及び反射光パルスタイミング列40の間の相関関数として識別する。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】ビーム走査用のミラー113に伴って回動する透明体200を配する。この透明体200にサーボ光を照射し、透明体200によって屈折されたサーボ光をPSD308にて受光する。PSD308の受光光量に応じた出力(SUM出力)を生成し、この出力が基準値(Vref)に一致するよう、半導体レーザ303の出力を制御する。このように制御することで、透明体200が回動しても、PSD308の受光光量は略一定となり、PSD出力に含まれる誤差を抑制できる。また、PSD308の受光光量が極端に低下した場合、SUM出力の替わりにモニター用PD303aの出力をサーボ光の出力制御に用いる。これにより、半導体レーザ303に過電流が流れることを防ぐことができる。
(もっと読む)
船舶の航路上の物体の検知と画像化のシステム
高速船舶及び他の船舶の航路内の物体(16)の検知と画像化及び、航海安全にリスクとなる物体の警告システムであって、船舶は航行及び通信システム(28)を備え、物体のレーザ照明用の走査ユニット(10)、制御ユニット(11)、オペレータパネル(12)を有する。走査ユニットは、システムの視野の内にレーザビーム(33)を放出するように調整された目に安全な赤外レーザの光源(30)と、レーザビームの出力パワーの監視と、物体までの距離の測定用のトリガパルスの生成と、反射放射エネルギーを受信/検知し、物体との距離を放射光と反射光の時間差に基づいて計測し、パルスエネルギーとピーク効果を計測し、第1(19)と第2(20)の走査機構により、レーザビームと光学検知器(38)の瞬時の視野を問題の走査領域に亘って走査し、船舶に対する瞬時の放射方向に関する方向情報を獲得する。 (もっと読む)
車両の検出方法及び装置
【課題】検知エリア内の車両を確実に追尾することができる車両の検出方法及び装置を提供する。
【解決手段】本発明に係る車両の検出方法は、検知エリアSの入口に初期検知エリアPを設定し、レーザ光Lの第n次走査結果(nは1以上の整数)から初期検知エリアPに存在する車両1を追尾対象車両1xと設定するとともに追尾対象車両1xの初期位置を把握し、初期位置から追尾サーチエリアCを設定し、レーザ光Lの第n+1次走査結果から追尾サーチエリアCに含まれる車両1cを追尾対象車両1xと同一車両であると判断する。
(もっと読む)
レーザレーダの姿勢認識方法及びレーザレーダ
【課題】踏切において地上座標系での監視領域を設定するに際し、施工時間の大幅な短縮を実現でき、施工作業員の熟練度に問わず高い精度で監視領域を設定することが可能であり、日中においても監視領域の設定作業を行う事ができるレーザレーダの姿勢認識方法及びレーザレーダを提供する。
【解決手段】レーザ光LTを発する投光部2と、レーザ光LTを走査する走査部3と、計測対象Tで反射して戻った反射レーザ光LRを受ける受光部4と、レーザ光LTの投光タイミング及び走査部3による走査を制御する制御部5と、レーザ光LTの投光タイミング及び反射レーザ光LRの受光タイミングから計測対象の三次元情報を得る演算部6と、監視領域Eの四隅に配置されるレーザ光反射体7を備え、演算部6では、四箇所に設定したレーザ光反射体7の各位置を測定して得た極座標系位置データから、地上座標系による距離測定原点位置及び設置姿勢を求める。
(もっと読む)
3次元レーザ測距装置
【課題】測定レンジの広い3次元レーザ測距装置を提供する。
【解決手段】レーザセンサ10は、レーザ光源12と小鏡面群を有するポリゴンミラー30と、レーザを小鏡面群のそれぞれに向かうように角度を2次元的に変化させながら反射する揺動ミラー22を有する2次元走査ミラーユニット20を備えている。ポリゴンミラー30の小鏡面群は、それらの法線群が平面内で放射状に伸びている。2次元走査ミラーユニット20は、レーザの反射光が、法線群が平面内で放射状に伸びている小鏡面群のそれぞれに順次向かうように第1軸の周りに揺動ミラー22の角度を変化させ、次に、法線群が他の平面内で放射状に伸びている小鏡面群に順次向かうように第1軸と交差する第2軸の周りに揺動ミラーの角度を変化させる。このレーザセンサ10は、法線群が平面内で放射状に伸びている小鏡面群のそれぞれにレーザを照射することによって広角な走査レンジを達成する。
(もっと読む)
レーザレーダ
【課題】受光器までの長い焦点距離を確保したうえで、本体ケースの小型化を実現することが可能であるレーザレーダを提供する。
【解決手段】本体ケース12と、本体ケース12に収容されて投光器2から発せられるレーザ光LTを二次元的に走査する走査部3と、走査部3による走査範囲内の計測対象で反射して戻った反射レーザ光LRを走査部3を介して受ける受光器4を備え、支柱Pに一端11aを固定し且つ他端11bに本体ケース12を取り付けた長尺状をなすケース支持管体11を設け、ケース支持管体11の中空部分で且つ走査部3から所定の距離dをおいた部位に受光器4を配置した。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査制御を簡易かつ高精度に行い得るビーム照射装置を提供する。
【解決手段】ミラー113が中立位置にあるときに、サーボ光が透明体200の入射面と出射面に垂直に入射するよう、半導体レーザ303と透明体200を配置する。これにより、サーボ光の走査軌跡が直線に近くなる。サーボ光の走査軌跡間の間隔を広げるには、透明体200をミラー113に平行に配置すると良い。こうすると、PSD308による照射位置検出の分解能を高めることができ、検出信号の品質を高めることができる。
(もっと読む)
ビーム照射装置
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出信号の精度を高めることができるビーム照射装置を提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3を備える。PSD信号処理回路3は、目標領域に照射されるレーザ光の一部がPSD308に入射することにより生じる外乱信号をPSD308からの出力信号から除去する信号除去回路15、16、17、18を有する。
(もっと読む)
レーザレーダの計測状況判定方法及びレーザレーダ
【課題】システムのコスト上昇及び故障率増加を招くことなく、レーザレーダの取り付け姿勢のずれや天候によるレーザ光の空間伝播率低下などの計測状況の変化を確実に判定し得るレーザレーダの計測状況判定方法及びレーザレーダを提供する。
【解決手段】投光部2と、投光部2からのレーザ光LTを走査する走査部3と、計測対象からの反射レーザ光LRを受ける受光部4と、投光タイミング及び走査部3による走査を制御する制御部5と、レーザ光LTの投光タイミング及び反射レーザ光LRの受光タイミングから三次元計測情報を得る演算部6と、監視可能領域Eの一箇所に設置される判定用レーザ光反射体7を備え、演算部6では、判定用レーザ光反射体7の初期データから得られる計測点数閾値及び反射強度閾値と、計測中に取得する判定用レーザ光反射体7の計測データ中の計測点数及び反射強度とからレーザレーダ1の設置状況及びレーザ光の空間伝播状況を判定する。
(もっと読む)
光走査用アクチュエータ、光走査型センサおよび物体検出装置
【課題】レイアウトの自由度が高く、かつ良好な駆動効率を実現することができる光走査用アクチュエータ、光走査型センサおよび物体検出装置を提供する。
【解決手段】光を透過、屈折または反射する第1光学素子を保持する第1保持部材と、第1保持部材をベース部材に対して所定の方向へ駆動する第1駆動手段と、ベース部材と第1保持部材とを連結し、第1保持部材をベース部材に対して変位可能に支持する第1支持手段と、第1保持部材よりも第1光学素子が出射する光が進行する側に位置し、第1光学素子が透過、屈折または反射した光を受光し、この受光した光を透過、屈折または反射する第2光学素子を保持する第2保持部材と、第1駆動手段が第1保持部材を駆動する方向と異なる方向へ第2保持部材を駆動する第2駆動手段と、ベース部材と第2保持部材とを連結し、第2保持部材をベース部材に対して変位可能に支持する第2支持手段と、を備える。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】ビーム走査用のミラー113に伴って回動する透明体200を配する。この透明体200にサーボ光を照射し、透明体200によって屈折されたサーボ光をPSD308にて受光する。PSD308の受光光量に応じた出力(APC用出力)を生成し、この出力が基準値(Vref)に一致するよう、半導体レーザ303の出力を制御する。このように制御することで、透明体200が回動しても、PSD308の受光光量は略一定となり、PSD出力に含まれる誤差を抑制できる。
(もっと読む)
赤外線撮像装置および赤外線撮像方法
【課題】異なる距離にある対象物を同時に撮像する。
【解決手段】所定波長の第1の赤外パルスレーザ光を生成し、監視領域内へ照射する第1のレーザ照射器12Aと、第1の赤外パルスレーザ光の反射光を第1の検知素子131で逐次受光し、光電変換して電気信号を出力する第1の赤外線検知器13と、この電気信号から第1の赤外線反射画像用信号を生成する第1の信号処理器15Aと、第1の赤外パルスレーザ光と異なる波長の第2の赤外パルスレーザ光を生成し、監視領域内へ照射するレーザ照射器12Bと、第2の赤外パルスレーザ光の反射光を第2の検知素子141で逐次受光し、光電変換して電気信号を出力する第2の赤外線検知器14と、この電気信号から第2の赤外線反射画像用信号を生成する第2の信号処理器15Bを備え、第1の検知素子131と第2の検知素子141が外表面上に市松状で配置された赤外線撮像装置。
(もっと読む)
光照射装置
【課題】レーザビームのスキャンパターンを徐々に変更することができ、且つ位置検出素子の精度誤差を補正して正確なアクチュエータの位置制御を行うことができる光照射装置を提供すること。
【解決手段】スキャナ制御部300内のDSP301が有するメモリ301dにスキャンパターンに応じた複数の角度指示値を制御パラメータとして記憶させておく。システム制御部100からスキャンパターンの切り替え指示がなされた場合には、アクチュエータ202の位置指示値が不連続に変化しないようにメモリ301dから角度指示値を読み出して目標角度指示テーブル設定部301eに設定する。また、メモリ301dに記憶させる角度指示値はPSD204aの非線形誤差を打ち消す補正値によって補正しておく。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
物体の位置情報算出方法
【課題】物体の存在だけでなく、物体の位置、寸法などの物体プロファイルまでを算出して出力することができる物体の位置情報算出方法を提供する。
【解決手段】3次元レーザレーダ10に取り込まれた物体の距離情報および走査情報などのレーザレーダ情報記録21を物体の位置情報を用いる座標系に座標変換22する。この変換情報から検出すべき領域の座標情報を検出領域設定23し、設定された領域外を背景情報として分離消去する。前記の検出すべき領域を複数のグリッドに分割し、各グリッド内の物体検出情報の個数をグリッド情報カウント25し、予め設定したカウント数より少ないカウント数のグリッドをノイズ情報グリッドとして消去する。消去されたグリッド以外のグリッドを囲む最小長方形領域27を求め、該領域の4つの頂点座標を物体の位置情報とし、該領域内の物体検出情報から物体の長さ、幅、高さなどの物体プロファイル情報として算出し出力する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
レーザレーダ及びレーザレーダの据付方向調整方法
【課題】据付時の自身の方向調整を簡単且つ高精度で行うことができるレーザレーダ及びレーザレーダの据付方向調整方法を提供する。
【解決手段】投光部2と、投光部2から発したレーザ光LTを走査する走査部3と、計測対象領域Eで反射して戻った反射レーザ光LRを受ける受光部4と、レーザ光LTの投光タイミング及び走査部3による走査を制御する制御部5と、投光タイミング及び受光タイミングに基づいて計測対象領域Eの三次元情報を取得する演算部6と、制御部5から投光指令を受けて投光部2に代わってレーザ光Lを照射して水平面及び垂直面に沿う面状レーザビームH,Vを形成するレーザマーカ10を備え、演算部6では、レーザマーカ10により面状レーザビームH,Vを形成した段階で、走査部3を介して受光部4に戻る面状レーザビームH,Vの水平面情報及び垂直面情報に基づいて、走査部3のピッチ方向,ロール方向及びヨー方向の各調整量を演算する。
(もっと読む)
141 - 160 / 270
[ Back to top ]