
Fターム[5J084BA50]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 2次元走査を行うもの (270)
Fターム[5J084BA50]に分類される特許
121 - 140 / 270
ビーム照射装置
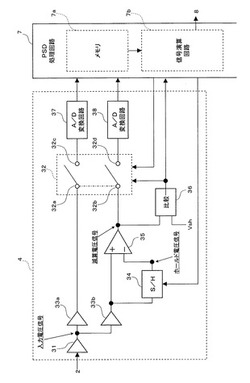
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
走査制御装置

【課題】永久磁石の長さ以上に走査対象物を走査させることができる走査制御装置を提供する。
【解決手段】永久磁石である磁石103A、磁石103Bの表面から所定間隔空けてコイル102が板ばね17により支持されている。コイル102は、磁石103Aおよび磁石103Bの磁界に対して直交する方向に電流が流れる。コイル102に電流を流すと、フレミングの法則に従って電磁力が発生し、コイル102を走査することができる。ここで、コイル102の一端が、磁石103A、磁石103Bのいずれかの面から外れる場合、電流の供給を停止する。すると、コイル102は慣性による移動を行い、板ばね17の共振周波数で振幅運動が継続する。よって、永久磁石の磁界を超えても走査対象物を走査することができる。
(もっと読む)
対象物検出装置
【課題】レーザ光照射方向に対して走査機構が薄く、かつ水平方向に移動量が大きい対象物検出装置を提供する。
【解決手段】高速に大きく移動することが求められる水平走査機構としてリニアモータ11を用い、水平方向ほどの高速移動性が求められない垂直方向には、垂直走査機構としてステッピングモータ16を用いる。ステッピングモータ16は、2つの板ばね17、受光レンズ14、および投光レンズ15で囲まれた空間に配置される。よって、レーザ光照射方向に対して走査機構が薄く、かつ水平方向に移動量が大きい対象物検出装置を実現することができる。
(もっと読む)
レーザレーダ及びレーザレーダの運用方法
【課題】稼働状況に合わせた適切なメンテナンスを行うことが可能であるレーザレーダ及びレーザレーダの運用方法を提供する。
【解決手段】交差点Aに対してレーザ光LTを二次元的に走査し、このレーザ光LTの走査で得られる交差点A内における多数の計測点距離情報に基づいて、交差点Aの三次元情報を取得する検出部10と、検出部10で取得した三次元情報に基づいて、交差点A内に存在する車両Cを検出して出力する判定部20と、判定部20で取得したデータを蓄積可能なサーバSに対して公衆回線を用いて送信する公衆回線通信部30と、温度や湿度等の設置環境情報を収集する動作環境情報収集部40と、各構成部の稼働時間等の運用情報を収集する運用情報収集部50と、レーザレーダ1に対する外部からの操作履歴や発生したトラブル等の履歴情報を収集する履歴情報収集部60を備えている。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
レーザ距離測定装置
【課題】少なくともレーザレーダヘッド内に配置された信号処理部の故障を把握することができるレーザ距離測定装置を提供する。
【解決手段】レーザ光Lを投光する投光部1と、反射光Rを受光して受光信号Srを発信する受光部2と、物体の測定距離を含む計測データDを作成して発信する信号処理部3と、レーザ光Lを受光部2に伝達する光ファイバ4と、これらを収容するレーザレーダヘッド5と、レーザレーダヘッド5と離隔して配置されるとともに計測データDを受信して測定結果を出力する制御装置6と、を有し、制御装置6は、光ファイバ4の測定距離Fと光ファイバ4の長さに相当する初期値Fiとを比較して測定距離誤差ΔFを算出し、測定距離誤差ΔFが所定の閾値αを超えた場合に故障信号を発信する。
(もっと読む)
安全光電スイッチ
【課題】光走査型光電スイッチそれ自体の能力を使って他の光電スイッチとの間の干渉を防止する。
【解決手段】第1、第2の光走査型光電スイッチ(1A,1B)の投光パルスの周期は、第1の光走査型光電スイッチ(1A)では30μsに設定されているのに対して、第2の光走査型光電スイッチ1B(1B)では33μsに設定されており、投光パルスのパルス幅は同じである。第1、第2の光走査型光電スイッチ(1A,1B)との間で異なる投光周期を設定することで、仮にいずれかの光軸で相互干渉が発生したとしても、次のスキャンでは互いに回転周期に36°の位相差が生じるため、複数回のスキャンで連続して干渉することはない。第1、第2の光走査型光電スイッチ(1A,1B)は複数化の検知で初めて出力を変化させる。
(もっと読む)
レーザスキャナ及びレーザスキャナ測定システム及びレーザスキャナ測定システムの較正方法及び較正用ターゲット
【課題】測定した点の特定や点検が容易に行え、又レーザスキャナ測定システムのキャリブレーションを簡単に実施できる様にする。
【解決手段】パルスレーザ光線を発する発光素子18と、前記パルスレーザ光線を走査する回転照射部9と、測距受光部21を有し、対象物からの反射光を受光して測距を行う測距部20と、前記発光素子、前記測距部を駆動制御する制御部10を具備するレーザスキャナ3と、既知の形状の高反射率を有する反射部を有し、既知の位置に設置された較正用ターゲットとを備え、前記制御部は前記測距受光部が受光する前記反射部からの反射パルスレーザ光線を光量のレベル検出により判別し、判別結果に基づき前記反射部の中心位置を求め、求めた中心位置と前記既知の位置とに基づきレーザスキャナ測定システムの較正を行う。
(もっと読む)
レーザレーダ装置
【課題】3次元的な検出を簡易な構成で良好に行い得るレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、偏向部41によって空間に向けて投射されたレーザ光を偏向させる偏向部材80を備えており、偏向部41が第1回動範囲にあるときには、偏向部41にて反射したレーザ光が偏向部材80によって偏向されずに空間に投射され、偏向部41が第2回動範囲にあるときには、偏向部41にて反射したレーザ光が偏向部材80によって偏向される構成をなしている。そして、第2回動範囲において偏向部材80から投射されるレーザ光の走査エリアが、第1回動範囲における偏向部41からのレーザ光の走査エリアの上方及び下方の少なくともいずれかとなるように、偏向部材80の偏向方向が設定されている。
(もっと読む)
車両ドア開度制御装置
【課題】スイングドアに対して用いることができ、ユーザに痛みを感じさせず、且つ、指など、ドアに挟まれる可能性がある部分が人体の極一部であっても挟み込みを防止することができる車両ドア開度制御装置を提供する。
【解決手段】車両ドア(スイングドア)30のドアミラー32の下部に設けたレーザセンサ9により、車両ドア30の表面に対し、車両ドア30が開扉される方向に所定角度ずれた走査平面を走査するようにレーザ光を送光するとともに、物体によって反射された反射光を受光する。このレーザセンサ9によるレーザ光の送光・受光結果に基づいて、人検出範囲40に物体が存在するか否かを判断するし、人検出範囲40に物体の存在が検知されたことに基づいて、車両ドア30の半ドア状態から全閉状態への閉め込みを禁止する。
(もっと読む)
六自由度計測装置及び方法
六自由度計測用のレーザ追尾システムとして、第1レーザビームを輻射する主光学アセンブリ、第2レーザビームを二次元パターンへと整形して輻射するパターン投射アセンブリ、並びに標的を備え、その標的が再帰反射器及び位置検出アセンブリを有し、その再帰反射器の対称中心が位置検出アセンブリの存在平面とは異なる平面上にあるものを提案する。標的の向きを計測する方法として、二次元パターンを呈するようレーザビームをその標的に入射させるステップと、位置検出アセンブリ上における二次元パターンの位置を調べそのパターンの実測シグネチャ値を求めるステップと、得られた実測シグネチャ値に基づき標的の向きを算出するステップと、を有する方法を提案する。  (もっと読む)
(もっと読む)
レーザレーダ及びレーザレーダによる計測方法
【課題】レーザ光走査の高速化,装置の小型化及びコスト低減を実現することが可能であるレーザレーダ及びレーザレーダによる計測方法を提供する。
【解決手段】投光部2と、投光部2から発したレーザ光LTを走査する走査部3と、投光部2にレーザ光LTの投光指令を発すると共に走査部3による走査を制御する制御部4と、走査部3によるレーザ光LTの走査により走査範囲E内の計測対象Pで反射して戻る反射レーザ光LRのみを制御部4からの指令に基づいて選択するデジタルマイクロミラーデバイス5と、このデジタルマイクロミラーデバイス5で選択された反射レーザ光LRを受ける受光部6と、制御部4から与えられるレーザ光LTの投光タイミング及び受光部6から与えられる反射レーザ光LRの受光タイミングに基づいて計測対象Pの距離情報を取得する距離演算部7を具備している。
(もっと読む)
障害物検出方法及び装置
【課題】障害物が車両や列車等の物陰に隠れた場合であっても障害物を認識することができ、障害物の検出性能を向上させることができる障害物検出方法及び装置を提供する。
【解決手段】本発明の障害物検出方法は、レーザレーダ1によって所定の監視領域Kを走査し、レーザレーダ1により検知される距離情報と走査方向の情報とから3次元レーダ情報を求め、該3次元レーダ情報から監視領域K内に存在する物体Aを検知し、監視領域K内で一定時間以上継続して滞留している物体Aを障害物Aとして検出し、障害物Aとして検出された物体Aが監視領域K内で検知できなくなった時に、監視領域K内で他の物体Bが検知されている場合には、障害物Aは監視領域K内に滞留していると擬制する。
(もっと読む)
レーザ装置および距離測定装置
【課題】複数種類の波長のレーザ光を発生する構成において、より簡素な構造で出射光の波長の切換が可能な技術を提供する。
【解決手段】レーザ増幅部103の出力側の光軸に、温度によって前記基本波の高調波への変換効率が変化し、反転分極構造を有する非線形結晶107を配置し、その温度を加熱冷却装置108によって制御可能とする。この非線形結晶107は、第2高調波の生成効率が高い温度依存性を有しているので、温度を制御することで、出力に含まれる基本波と第2高調波の割合を調整可能となる。
(もっと読む)
レーザ装置および距離測定装置
【課題】複数種類の波長のレーザ光を発生する構成において、出射光の波長によるビーム中心軸のずれが生じない技術を提供する。
【解決手段】レーザ共振器103の出力側の光軸上に、偏波分離特性を有した非線形結晶107を配置し、基本波と第2高調波を得る。偏波分離特性により、出射位置の異なる基本波と第2高調波とを集光レンズ108を用いて、光ファイバ109に導き、両光線のビーム中心軸を合わせる。これにより、基本波と第2高調波とのビーム中心軸の不一致に起因する測定精度の低下が防止される。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出精度を高めることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3と、PSD信号処理回路308からの信号に基づいてレーザ光の走査位置を検出するDSP8を備える。DSP8は、レーザ光の発光期間以外の期間(位置検出期間)においてレーザ光の走査位置の検出を行う。
(もっと読む)
光スキャン装置
【課題】指示した動きと実際の動きとの差を小さくして高精度な光走査を行うことができる光スキャン装置を提供すること。
【解決手段】レーザダイオードから出射されるレーザ光の方向をレンズが搭載された可動部を移動させることによって変化させる光スキャン装置において、レーザ光の走査を行うための往路の期間801で発生させる加速度の大きさよりも、レンズの位置を戻すための復路の期間802で発生させる加速度の大きさを大きくする。
(もっと読む)
レーザレーダ及びレーザレーダによる境界監視方法
【課題】境界監視用に用いる場合、監視コストの上昇を少なく抑えつつ、境界に沿った広範囲な監視が可能であるレーザレーダ及びレーザレーダによる境界監視方法を提供する。
【解決手段】二つの投光部2A,2Bと、投光部2A,2Bから発したレーザ光LTを走査する走査部3と、計測対象領域で反射して戻った反射レーザ光LRを受ける二つの受光部4A,4Bを備え、走査部3は、ポリゴンミラー31と、ポリゴンミラー31で反射した二つの投光部2A,2Bからのレーザ光LTをフェンスFに沿って走査すると共に、フェンスF近傍の異なる計測対象で反射して戻った反射レーザ光LRをポリゴンミラー31を介して個々に受光部4A,4Bに戻す揺動ミラー32を具備し、一方の投光部2A及び受光部4Bと、他方の投光部2B及び受光部4Bとをポリゴンミラー31を挟んでそれぞれ配置し、各光軸LA,LBが成す角度θを鋭角に設定した。
(もっと読む)
レーザレーダ及びレーザレーダによる境界監視方法
【課題】境界監視用に使用する場合において、監視コストの低減を実現したうえで、フェンス付近の計測対象の三次元データを生成することが可能であるレーザレーダ及びレーザレーダによる境界監視方法を提供する。
【解決手段】投光部2と、投光部2から発したレーザ光LTを走査する走査部3と、計測対象領域で反射して戻った反射レーザ光LRを受ける受光部4と、レーザ光LTの投光タイミング及び走査部3による走査を制御する制御部5と、計測対象の距離情報を取得する演算部6を備え、走査部3は、中心軸31と直交する底面32aに対する角度が互いに異なる複数の斜面32bを有する角錐台形状を成すポリゴンミラー32と、ポリゴンミラーを回転させるモータ33を具備していて、モータ33が一回転する毎に角度分解能を算出し、ポリゴンミラー32の角度を算出して制御部5に出力する。
(もっと読む)
レーザレーダ及びレーザレーダによる境界監視方法
【課題】境界監視用に使用する場合において、監視コストの上昇を少なく抑えたうえで、従来境界柵部の内側及び外側のいずれかに生じていた死角をなくすことが可能であるレーザレーダ及びレーザレーダによる境界監視方法を提供する。
【解決手段】二つの投光部2A,2Bと、投光部2A,2Bから発したレーザ光LTを走査する走査部3と、計測対象領域で反射して戻った反射レーザ光LRを受ける二つの受光部4A,4Bを備え、走査部3は、水平軸回りに回転する一つのポリゴンミラー31と、フェンスFの内外にそれぞれ配置されてポリゴンミラー31で反射した二つの投光部2A,2Bからの二筋のレーザ光LTをフェンスFの内外にそれぞれ走査すると共に、フェンスFの内外における互いに異なる計測対象で反射して戻った二筋の反射レーザ光LRをポリゴンミラー31を介して個々に二つの受光部4A,4Bに戻す二つの揺動ミラー32,32を具備している。
(もっと読む)
121 - 140 / 270
[ Back to top ]