
Fターム[5J084BA50]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 2次元走査を行うもの (270)
Fターム[5J084BA50]に分類される特許
101 - 120 / 270
ビーム照射装置
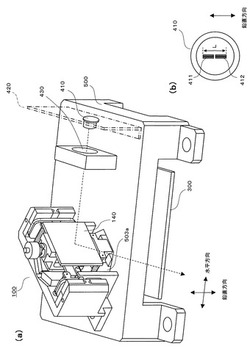
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
距離画像処理システム

【課題】 距離画像センサの位置調整を容易に行うことのできる距離画像処理システムを提供する。
【解決手段】 所定の被測定対象の距離値を検出する距離画像センサ1と、距離画像センサ1から入力される各画素の距離値に基づいて生成された距離画像から特徴部を抽出する画像処理回路46を備えた画像データ処理装置2と、を備え、画像処理回路46は、調整しようとする距離画像センサ1から入力される距離値に基づいて生成された距離画像から調整対象となる特徴部を抽出し、この調整対象となる特徴部と、あらかじめ抽出された基準となる特徴部とを比較し、その位置の誤差を演算するように構成されている。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
光測距装置
【課題】光を透過させる投受光窓を介して、測定対象物に向けた投光及び測定対象物からの反射光の受光を行って、前記測定対象物までの距離を測定する光測距装置において、前記投受光窓の汚れを、簡易な構成で高精度に検知できるようにする。
【解決手段】距離値算出部101での測距結果、及び、受光光量レベルを入力する汚れ検知部107において、投受光窓6までの距離に相当する測距値を得た場合に、当該測点に対応する投受光窓6の領域に汚れが付着していると判断し、かつ、当該測定における受光光量レベルから汚れの濃度を検出する。そして、前記汚れの付着が判断された測点と該測点での汚れ濃度とから汚れレベルを判断し、汚れレベルに基づいて、警告装置108、投受光窓上の汚れを除去する除去装置109を動作させ、また、測点位置・投光強度・受光感度の変更などの測距動作の補正を行う。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
画像撮像装置
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム
【課題】道路を高解像度で表す三次元モデルを生成できるようにすることを目的とする。
【解決手段】画像処理部110はカメラ画像を選択し、所定の処理範囲を処理範囲画像191として抽出し、処理範囲画像191のレンズ収差を補正する。画素点群生成部120はカメラ画像と三次元点群198とに基づいて処理範囲画像191の各画素に対応する三次元座標値および色情報を示す画素点群192を生成する。画素補間点群生成部130は画素点群192に基づいて画素点が低密度である部分を補間する画素補間点群193を生成する。道路三次元モデル生成部140は画素点群192と画素補間点群193とを含んだデータを道路三次元モデル194として生成する。
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ポインティングリファレンスを簡単な構成で走査範囲内に設置する。
【解決手段】レーザビームを第1及び第2のミラーで2次元に走査するレーザ測距装置において、前記レーザビームの送信側の前記第2のミラーは前記レーザビームを部分的に透過するミラーであり、前記第2のミラーを透過したリファレンス用レーザビームを当該第2のミラーに反射する第3のミラーと、前記第3のミラーで反射され、前記第2のミラーの裏面で反射された前記リファレンス用レーザビームを集光する集光光学系と、前記集光光学系で集光された前記リファレンス用レーザビームを検出する2次元アレイ状の検出器と、を更に備え、前記第1のミラー及び前記第2のミラーの角度情報と前記検出器の検出信号とに基づいて規定値からの変位量を計算し、前記変位量に基づいて前記第1のミラー及び前記第2のミラーの角度を校正する。
(もっと読む)
飛行機の識別及びドッキング誘導装置
【課題】飛行機のドッキング中の事故を防止し得るように飛行機の検出を改良すること。
【解決手段】ゲートに近づきつつある飛行機(12)を特定するために、レーザー距離計(LRF)(20)が使用される。LRF(20)は飛行機(12)に向けられており、エコーから輪郭を得て、公知の輪郭と比較される。類似した輪郭を有する飛行機(12)から区別するために、LRFは、エンジンのような構造があると予想される容積及びエンジンがないと予想される別の容積に向けられる。これらの2つの容積からのエコーは、エンジンが予期した場所にあるか否かを決定するために使用される。エンジンがある場合には、飛行機(12)は正しい機種のものであるとして特定され且つゲート(16)に入ることを許容される。そうでない場合には、飛行機(12)は止められる。機首の高さは、更に別の特定のための判定基準として使用することができる。
(もっと読む)
位置確認のために三次元位置と二次元強度のマッピングを組み合わせるための方法と装置
マッピング方法は、第1のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために該第1のモバイルユニットを使用する工程を含む。該特徴の三次元位置はマッピング中に検知される。三次元マップは、特徴の三次元位置と二次元の特徴のマップとの間の関連性を含むように作成される。三次元マップは第1のモバイルユニットから第2のモバイルユニットに提供される。第2のモバイルユニットは、第2のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために使用される。第2のモバイルユニットによってマッピングされた二次元の特徴の三次元位置は、第2のモバイルユニット内で、三次元マップを使用することにより測定される。 (もっと読む)
目標検出装置及び目標検出方法
【課題】低熱源目標を容易にかつ確実に検出可能な目標検出装置を提供する。
【解決手段】赤外線カメラ12の視野内に、光学装置11から赤外線レーザビームを放射してカメラ視野範囲を走査していき、低熱源目標Tに当たって反射する赤外線レーザビームの反射光を赤外線カメラ12に入射して目標情報検出器14により低熱源目標Tを検出するようにしている。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
走査型測距装置
【課題】走査効率の高い走査型測距装置を提供する。
【解決手段】投受光部1aから投光された測定光は鏡面2aによって反射され、筐体の透過部6を通過し、測定対象空間に照射される。測定対象空間に測定対象物があると、測定対象物からの反射光は、透過部6を再度通過し、鏡面2aによって反射され、投受光部1aにて受光されることで測定対象物の位置を測定する。また、同時に他方の投受光部1b、鏡面2bでも同様に他の測定対象物の位置を測定することにより測定効率を向上することができる。
(もっと読む)
架空ケーブルの地上高測定装置
【課題】ケーブル状の細い被測定部でも簡単に地上高さを測定する。
【解決手段】略上方の所定の立体角の範囲で測長レーザー光を2次元走査して測長を行なうレーザーレーダと、該測長レーザー光の照射方向と鉛直方向の成す角度と、該測長の結果とに基づき前記範囲内における最低の鉛直高さを得るコンピュータと、該最低の鉛直高さを数値で表示する表示器と、を備えた。範囲内の2次元走査は1乃至数秒以内で行なえることが望ましい。走査後に、最低値が得られたレーザー照射方向に固定して照射を行い、ケーブルに当たったレーザー光を目視で確認できるようにしても良く、或いは範囲内の各所での測定結果を被測定物の形状や位置が認識できるようにグラフィカル表示してもよい。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
障害物検出方法及びレーザ距離測定装置
【課題】踏切内の溝に人が入り込んだとしても、障害物として検出し得る障害物検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、踏切内に存在する歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、制御部6では、連続して取得する歩行者の計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理を行う。
(もっと読む)
車両渋滞検出装置
【課題】車両の渋滞の末尾位置を精度良く検出することが可能であり、光量の少ない環境でも渋滞を検出することが可能であり、さらに従来よりも短い時間毎の渋滞を検出することが出来る車両渋滞検出装置を提供することを目的とする。
【解決手段】車両渋滞検出装置が、所定の領域を走査するレーザレーダセンサと、レーザレーダセンサの検出結果に基づく距離情報と、レーザレーダセンサの走査方向の情報とからレーダ情報を生成し、レーダ情報から所定の領域内に存在する車両を検出し、進行方向側の車両から進行方向逆側の車両までを順番に渋滞車両であるか否か判定し、車両が渋滞車両であると判定した場合に当該車両の位置を渋滞末尾位置として指定することによって進行方向逆側末尾の渋滞車両の位置を渋滞末尾位置として最終的に指定する制御部を具備する。
(もっと読む)
101 - 120 / 270
[ Back to top ]