
Fターム[5J084CA05]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 送信系に関するもの (1,298) | 変調方式、変調回路に関するもの (384)
Fターム[5J084CA05]の下位に属するFターム
無変調
振幅変調、強度変調 (149)
周波数変調、FM−CW (56)
位相変調 (15)
パルス変調 (115)
Fターム[5J084CA05]に分類される特許
21 - 40 / 49
光測距装置
【課題】測定値のばらつきによる影響を抑制し、測定精度を高めることが可能な光測距装置を提供する。
【解決手段】障害物センサ31は、2つの異なる周波数の変調光を交互に出射するように投光素子36を制御する出力制御部41と、受光素子37において受光された変調光に基づいて被投射体Tまでの測定距離を演算する距離演算部42と、2回の第1周波数の変調光によって演算された測定距離の差が、第1所定範囲内にあるかを判定する第1判定部43と、2回の第2周波数の変調光によって演算された測定距離の差が、第2所定範囲内にあるかを判定する第2判定部44と、第1判定部43と第2判定部44との判定結果に基づいて距離演算部42によって演算された測定距離の正誤を判定する総合判定部46とを備えている。
(もっと読む)
物理量センサおよび物理量計測方法

【課題】測定範囲の長距離化、高分解能、測定精度の安定化、および信号抽出の容易さを実現する。
【解決手段】物理量センサは、ダイアフラム制御信号に応じた共振器長の調節により発振波長の制御が可能な波長可変機構を備え、物体11にレーザ光を放射する波長可変半導体レーザ1と、半導体レーザ1の光出力を電気信号に変換するフォトダイオード2と、半導体レーザ1に駆動電流を供給するレーザドライバ4と、フォトダイオード2の出力電流を電圧に変換して増幅する電流−電圧変換増幅器5と、フィルタ回路6の出力電圧に含まれる干渉波形の数を数える計数部7と、干渉波形の数から物体11との距離および物体11の速度を算出する演算部8と、半導体レーザ1の発振波長を変調するダイアフラムドライバ10とを有する。
(もっと読む)
対物距離計測装置
本発明に係る装置は計測対象物(20)までの距離(d)を計測する装置であり、出射ビーム光(18)を発生させる発光器(12)、計測対象物(20)による出射ビーム光(18)の反射で生じる入射ビーム光(24)を受け取る受光器(14)、並びにそれらのビーム光(18,24)の伝搬時間に基づき距離(d)を求める評価ユニット(16)を備える。受光器(14)は、第1レンズ素子(60)及びピンホールダイアフラム(64)を有する受光ユニット(58)を備える。入射ビーム光(24)が光輪(102)状になってピンホールダイアフラム(64)に達するよう、非透光性の部材(12)で受光ユニット(58)の中央部に影を作る。第1レンズ素子(60)とピンホールダイアフラム(64)の間に、略鍔付帽子状断面の第2レンズ素子(62)を配置する。  (もっと読む)
(もっと読む)
レーザ測距装置
【課題】投光・受光の過程での光エネルギーの損失が少なく、かつ投受光視差も小さいレーザ測距装置を提供する。
【解決手段】パルス波または変調波からなるレーザ光1を発光する発光素子12と、発光素子に近接して位置しレーザ光2を対象物に向けて投光する投光レンズ14と、対象物で反射したレーザ光3を反射する反射ミラー16と、反射ミラーで反射したレーザ光を受光する受光器18とを備える。発光素子12は、ビーム拡がり角が小さい狭角方向とビーム拡がり角が大きい広角方向とを有している、また、投光レンズ14は、投光レンズ直後でのビーム形状を狭角方向に短く、広角方向に長く成形し、投光レンズ通過後のビームは広角方向ではほぼ平行光に、狭角方向は徐々に拡大するように焦点距離が選定されている。さらに、反射ミラー16は、投光レンズ14から投光されたレーザ光の狭角方向にレーザ光2と干渉しないように近接して位置する。
(もっと読む)
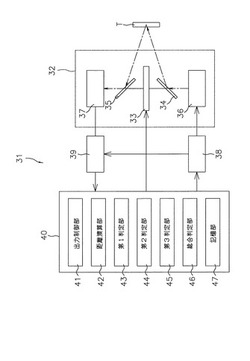
移動体用物体検出装置
【課題】受信信号の時系列フィルタの構造を複雑にしなくても、十分なS/N比を確保しつつ物体の誤検出を防止できる装置を提供する。
【解決手段】物体検出装置は、レーザ光の発光制御とその反射光の受光制御を行うL/R装置3と、L/R装置3の受信信号から物体を検出する物体検出部とを備えている。物体検出部は、走査範囲を所定数に分割した領域毎に受信信号を積算して領域計測データを記憶する積算データ格納メモリ43と、前記領域計測データを領域毎に記憶する領域計測データ格納メモリ44と、前記領域計測データを時系列フィルタリングしてノイズを除去する時系列処理装置45と、を備えている。また、前記物体検知部は、前記時系列処理装置45で処理された領域計測データのピーク値が前回走査の計測時よりも一定値以上減少しているデータについては、物体検知対象から除き、それ以外のデータについて物体検出を行う物体検出器47とを備えている。
(もっと読む)
光波測距方式及び測距装置
【課題】測距精度を向上させると共に測距可能な距離を伸ばすことができ、安価に測距装置を構成することが可能となる光波測距方式及び測距装置を提供する。
【解決手段】第一のPN符号により符号変調された光波を、測距ターゲットに対して発信すると共に第一のPN符号と同一符号で、かつ微小に異なる周波数を有する第二のPN符号を生成して第一のPN符号と第二のPN符号との相関値を低周波の波形信号へと変換し、測距ターゲットにより反射された光波を第二のPN符号を印加した受光素子によって受信し、積分処理して低周波の波形信号へと変換し、送信側相関信号と受信側相関信号との位相差を求め、その位相差から測距ターゲットまでの距離を算出する。
(もっと読む)
距離計および距離計測方法
【課題】距離の分解能を向上させる。
【解決手段】距離計は、半導体レーザ1に発振波長が連続的に増加する第1の発振期間と発振波長が連続的に減少する第2の発振期間とを交互に繰り返させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2と、フォトダイオード2の出力に含まれる干渉波形の数を数える計数装置8と、干渉波形の数から測定対象12との距離を算出する演算装置9とを有する。計数装置8は、干渉波形の数を数える計数期間における干渉波形の初期値及び最終値と干渉波形の計数結果とから、干渉波形の数を小数点単位で確定する確定手段を有する。
(もっと読む)
侵入者検知システム
侵入者検知システムは、変調信号によって変調された被変調光信号で視野を照明する照明手段と、遅延反射信号を受信する光受信器と、変調信号と受信された遅延反射信号との間で相互相関関数を計算する相互相関器と、侵入者検知を行うため使用される相互相関関数の変化を検知する手段と、を備える。本システムは、侵入者検知信号が取得されるようにする光センシングおよび相互相関計算を使用する。これは、侵入者を検知するため固体、低コストかつ高信頼性のセンサを提供することを可能にさせる。 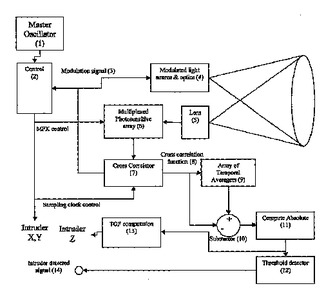 (もっと読む)
(もっと読む)
画像情報取得装置
【課題】レーザ光を測定対象物に照射し測定対象物からの反射光を受光することにより測定対象物の画像データを自動的に取得する装置であって、測定対象物の表面が光沢面であっても、正確かつ迅速に画像データを取得する。
【解決手段】画像情報取得装置は、時間変調レーザ光を照射するレーザ光出射部と、測定対象物からの反射光を受光する光電変換器と、複数のマイクロミラーを有し、選択されたマイクロミラーの反射面を制御してレーザ光を光電変換器に導く空間変調素子と、光電変換器で受光されたレーザ光の位相ずれ情報を用いて測定対象物の3次元位置データ及び反射強度データを取得するデータ処理部と、各部分の動作を制御する制御器と、を有する。データ処理部で取得される反射強度データのレベルが所定の閾値を超える場合、ON状態にするマイクロミラーの反射面の個数を絞った反射パターンに調整して、再度計測を行う。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】センサヘッド部の設置に際して、ワークに対して正確な位置調整を可能とする。
【解決手段】測定対象物からの反射光を受光して、第1の方向の各位置における受光信号として出力するための2次元受光素子と、2次元受光素子からの受光信号を増幅するための増幅器と、投光部からの照射光の反射光により、第1の方向の各点において増幅器で得られた増幅信号に基づき、測定対象物のプロファイル形状を演算可能なプロファイル演算手段と、プロファイル演算手段で演算された測定対象物のプロファイル形状を表示可能な表示部と、プロファイル形状を表示部で表示された状態で、所望の計測領域を指定するための計測領域指定手段と、領域指定手段で指定された計測領域に対して所望の演算を行うことが可能な計測処理部とを備える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】照射光の照射領域において別の光源(例えば、街灯や信号機等)の光がある場合でも、この光に影響されることなく複数の照射光をそれぞれ精度よく検出して、対象物までの距離を精度よく計測することができる距離計測装置を提供する。
【解決手段】照射制御部5から照射装置4に出力される照射信号に基づいて、照射装置4から照射された複数のスリット光の周期に対応した周期信号を検出する周期信号検出部10と、カメラ2の撮像素子の各画素からの輝度信号に基づいて複数のスリット光の各位相を検出する位相検出部11と、検出された位相検出情報と前記照射信号とに基づいて、複数のスリット光の照射方位を算出する照射方位算出部12と、算出された照射方位情報と、カメラ2と照射装置4との位置関係情報とに基づいて、三角測量法により照射光の照射領域に有る対象物までの距離を算出する距離算出部13を備えている。
(もっと読む)
円筒形反射器を利用した車両用レーザーレーダー及びその制御方法
【課題】車両の走行振動にも影響を受けずにレーダーのレーザースキャン動作がより安定的に行われ、遠距離及び近距離の検出が交互に行われる円筒形反射器を利用した車両用レーザーレーダー及びその制御方法を提供する。
【解決手段】本発明は、円筒形ボディ及びその円筒形ボディの内径面においてその円周方向に沿って装着される多数の反射ミラーとで構成される円筒形反射器と、前記円筒形反射器を回転させる回転駆動手段と、前記円筒形反射器の中空ホールに配置されるレーザー受光部と、前記円筒形反射器の後部側で対称に配置される左/右側レーザー発光部と、前記円筒形反射器の回転角度を検出する位置検出部と、前記レーザー受光部及び位置検出部の信号を受信する制御部、及び、前記位置検出部の検出信号によってレーザーの変調周波数を調整する変調回路部と、から構成されることを特徴とする。
(もっと読む)
空間エリアの3次元データを捕捉する方法及び装置
空間エリアの3次元データを捕捉する方法において、複数の測定ビーム(Ls)が複数の測定ポイントに送出される。検出器(50)は、測定ポイント(34a)に反射された複数の反射ビーム(Lr)を受信する。測定ポイント(34a、34b)までの複数の距離が反射ビーム(Lr)に応じて判定される。本発明の1態様によれば、可視の入口開口部(72)を有する隠れた経路(66)を含む少なくとも1つの物体(30)が、空間エリアに配置される。ロッド状要素(32)が、自由端(70)が入口開口部(72)から突出するように、経路(66)に挿入される。第1測定ポイント(34a)までの第1距離、及び、第2測定ポイント(34b)までの第2距離が判定される。隠れた経路(66)の方向(74)が第1及び第2距離に応じて判定される。  (もっと読む)
(もっと読む)
伝搬遅延時間測定装置およびレーダ装置
【課題】SNRの劣化を少なくして周波数伝達関数を取得し、その後に高分解能処理を行うことにより高精度に伝搬遅延時間を測定する。
【解決手段】受信拡散信号と参照信号の相互相関関数を算出する相互相関関数算出部と、参照信号の自己相関関数を算出する自己相関関数算出部、相互相関関数と自己相関関数の各ピーク値周辺を抽出する第1、第2の抽出部、相互相関関数と自己相関関数の各のピーク値周辺をフーリエ変換して第1、第2の周波数関数を得る第1、第2のフーリエ変換部、SNRの劣化を少なくする周波数範囲で第1の周波数関数を第2の周波数関数で除算して周波数伝達関数を得る除算部、周波数伝達関数に基づいて相互相関関数のピーク値に含まれるマルチパス波を分離して受信拡散信号の真の遅延時間を表す評価関数を算出する高分解能処理部を備える。
(もっと読む)
領域を3Dで取り込む装置および方法
空間領域の三次元被写域に対応した装置は、空間領域内の物点(20)までの範囲を特定するレンジファインダを有すると共に、画像記録ユニット(70)を有する。前記レンジファインダは、主にビームの形式で、物点に送信信号(18)を送信する送信機(12)と、前記物点からの反射信号(24)を受け取る受信機(14)と、前記送信信号(18)と前記反射信号(24)とに基づいて、前記物点までの範囲を決定するように設計された評価制御ユニット(16)とを含む。本装置は、更に、前記送信信号(18)を異なる空間的方向に向けるように設計されたビーム走査ユニット(23,30,54)を含む。画像記録ユニット(70)は、既定の画像記録領域を持ち、ビーム走査ユニット(22,30,54)と連結されて、前記画像記録領域と前記送信信号(18)とを同一の物点に整列させる。  (もっと読む)
(もっと読む)
チャープされた電磁放射を提供するシステムおよび方法
放射源からの電磁放射を制御可能にチャープするシステムおよび方法は、光学キャビティ構成を含む。光学キャビティ構成は、電磁放射を実質的に線形チャープレートで且つ設定可能な周期で生成することを可能にする。電磁放射を光学キャビティに選択的に注入することによって、電磁放射は、実質的に線形のチャープレートで周波数シフトされた単一共振モードで生成されてもよい。電磁放射を単一共振モードで生成することにより、電磁放射のコヒーレンス長が長くなり、これは、電磁放射が様々な用途で実現されるときに有利なことがある。例えば、光学キャビティ構成によって生成される電磁放射は、レンジ、速度、精度および/またはレーザレーダシステムの他の態様を強化する。  (もっと読む)
(もっと読む)
光波距離計
【課題】 基準信号の高調波成分がノイズとして測距光に重畳するのを抑制すること。
【解決手段】 基準信号発生器12の発生による基準信号(50MHz)を分周器14で1/2分周し、その信号を逓倍器18で3逓倍し、3逓倍された基準信号を変調信号として発光素子26の発光による光を変調して測距光としてターゲットに向けて出射し、ターゲットからの反射光を受光素子30が受光して得られた測距信号f0からバンドパスフィルタ38で測距信号f1を抽出し、この測距信号f1を混合器44、ローパスフィルタ56を介して中間周波の測距信号IF1に変換し、この測距信号IF1をA/D変換器68でサンプリングしてデジタルデータに変換し、このデジタルデータを基に演算器74で基準信号と測距信号IF1との位相差を求め、この位相差を基に測点までの距離を求める。
(もっと読む)
アクテイブタグ装置
【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。その際、受信手段2の受信器で抽出した信号の少なくとも1サイクル分を単位として基準発振器に同期したサンプリング周波数でデジタル信号に変換し、このデジタル信号と、SinおよびCosのルックアップテーブルとの積和演算を行うが、そのときの−1の乗算はデジタル信号の補数を求めることにより行う。
(もっと読む)
空間領域モニター装置および方法
【課題】空間領域をモニターするための、特に自動運転設備の危険領域を保護するための装置を提供する。
【解決手段】光信号を空間領域中に少なくとも一時的に光を発する照明装置を備え、第1画像記録ユニット22によって、空間領域の第1画像を記録する該第1画像記録ユニット22は、複数の画素を有する画像センサ26を備える。評価ユニット14は、伝搬時間測定を用いて、空間領域に配置され少なくとも一つの画素上に撮像される少なくとも一つの空間領域点34について距離値dMを決定するように設計される。試験装置15は、間違った距離値dMを識別するために、少なくとも一つの第1画像と一つの第2画像とを比較するように設計される。
(もっと読む)
変調電磁波場を復調する装置およびその方法
【課題】復調領域と検出領域との分離によって、高速および高感度で電磁波場を復調できるピクセルを提供する。
【解決手段】電磁波場を流動電荷の電気信号に変換する感光検出領域(1)と、少なくとも2つの出力ノード(D10、D20)と変調周期内に少なくとも2つの異なる時間間隔で電荷−電流信号をサンプリングする手段(IG10、DG10、IG20、DG20)とを有する分離された復調領域(2)とを備える。接点ノード(K2)は検知領域(1)を復調領域(2)に結合する。ドリフト電場は検知領域から接点ノードへの流動電荷の電気信号の転送を達成する。次に、流動電荷の電気信号は、2つの時間間隔中に、接点ノード(K2)から各時間間隔に割り当てられた2つの出力ノードに転送される。
(もっと読む)
21 - 40 / 49
[ Back to top ]