
Fターム[5J084CA22]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491)
Fターム[5J084CA22]の下位に属するFターム
Fターム[5J084CA22]に分類される特許
101 - 110 / 110
レーザ測距装置
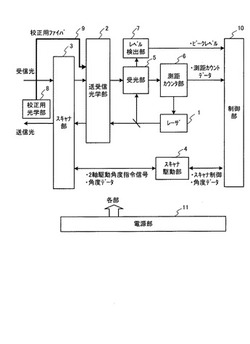
【課題】 レーザ測距装置内部に距離と角度を同時に校正可能な校正基準を設け、宇宙の環境条件で変化するスキャナ制御のバイアス誤差等を軌道上で校正可能とし信頼性の向上を図る。
【解決手段】距離校正用の内部リファレンスに光ファイバ9を用い、その光ファイバの入射位置を角度校正のリファレンス位置とすることで距離と角度の校正を同時に実施する。ここで、光ファイバ9へ入射するビームは集光レンズで絞り、集光点にはビーム拡がり角以下のピンホールを設置することで、校正精度の分解能を向上させる。また、校正点をスキャナの角度で送信光量の変化しない領域に複数設け、その受信光のレベルを検出し比較することでスキャナへの指令角度に対する実際の変位角の誤差を見積もることができ、そのバイアス誤差を校正する。
(もっと読む)
対象物検出装置および方法

【課題】対象物検出装置の投光するレーザ光の投光方向のずれを補正できるようにする。
【解決手段】左から右に向かって走行する自車1に、所定の高さhで取り付けられた対象物検出装置2のレーザレーダ3から投光されたレーザ光は、頭上標識41により反射され、レーザレーダ3に受光され、対象物検出装置2は、頭上標識41までの距離を算出し続ける。頭上標識41がレーザ光の投光範囲外に出る瞬間、すなわちレーザ光上端31が、頭上標識41の下端bを通過する瞬間、対象物検出装置2は、頭上標識41までの距離L1を特定し、頭上標識41の設置高H、および対象物検出装置2の設置高hを基に、レーザ光上端31の平行線51に対する角度θを算出する。対象物検出装置2は、算出したθから角度Θ/2を引き、平行線51に対する光軸33の角度を求めることにより、光軸のずれを求め、これを補正する。
(もっと読む)
カメラ
【課題】構造が簡単なカメラを提供すること。
【解決手段】特定の輻射パターンを持つ投射光を被写体に照射するストロボ505、506を有し、ストロボ505、506の被写体反射光を撮像し、撮像した画像の光強度を用いて奥行き画像を得る、形状計測用または被写体抽出用のカメラであって、ストロボ505、506の発光なしの状態にて動画像を撮像し記録メディアに録画できるビデオカメラ533を兼ねており、ストロボ505、506が発光した時に撮像した画像データにインデックス信号を付加しておき、インデックス信号が付加された特定の画像のみを用いて奥行き画像を算出する。
(もっと読む)
車両用物体認識装置
【課題】路上にある道路標識等の看板を確実に識別して先行車両等の車線上の物体との距離測定が看板に影響されずに正しく行うことのできる車両用物体認識装置を提供する。
【解決手段】車両用物体認識装置は、前方を走行する先行車両や障害物等の物体との間の距離L1や方位を測定する相対位置測定装置7と、前方の画像を撮像して画像認識を行い、撮像画像に基づいて距離L2を測定する撮像装置5とを備える。
先行車両6が看板3の下方を通過する際に検知ビーム2を看板3を照射しない検知ビーム2′まで下げることにより、先行車両6までの測定距離に誤差が生じないようにする。
(もっと読む)
前方物体検出装置及び前方物体検出方法
【課題】道路構造物及び道路構造物以外の物体を正確に検出する前方物体検出装置又は前方物体検出方法を提供する。
【解決手段】
自車両の前方に出射された走査波の反射波に基づいて検出された前記物体の検出ポイントの情報を含む検出情報を取得する検出情報取得手段20と、自車両の現在位置を取得するとともに、地図データベースにアクセスして自車両前方の道路形状情報を取得し、当該道路形状情報に基づいて自車両前方の走行道路の道路形状モデルを算出する道路形状モデル算出手段10と、取得された検出情報と算出された道路形状モデルとに基づいて道路構造物モデルを算出し、算出された道路構造物モデルと所定の位置関係を有する検出ポイントをグルーピングし、当該グルーピングされた検出ポイントに対応する物体を道路構造物として検出する道路構造物検出手段30とを有する。
(もっと読む)
絶対距離値を測定する方法及び測定装置
本発明は、測定装置(10)とターゲット(8)との間の区間(9)に応じて絶対距離値を測定する方法及び測定装置(10)に関する。この場合、多数の個々の測定ステップが、絶対距離値を測定する絶対距離測定器(1)によって実施される。これらの個々の測定ステップと少なくともほぼ同時に、測定装置(10)とターゲット(8)との間の距離変化も、相対距離測定器(2)によってその都度測定され、この距離変化が、絶対距離を算定するために考慮される。特にフィゾー法にしたがって、絶対距離値を測定するため、多数のサンプリングステップによる反復法が使用される。この場合、出力値(A)が、各サンプリングステップで入力値(fn ,fn+1 ,fn+2 ,...)から生成されて測定され、この出力値(A)は、入力値(fn ,fn+1 ,fn+2 ,...)及び距離に依存する。この場合、サンプリングステップと後続するサンプリングステップとの間で生じる距離変化が、その都度測定され、後続するサンプリングステップに対する入力値(fn+1 ,fn+2 ,fn+3 ,...)の算定時にこの距離変化を校正するために使用される。 (もっと読む)
非理想的チャープ形状の決定による電気光学的距離測定方法
本発明は、電気光学的距離測定方法に関係し、それは、周波数変調された光放射が、測定される少なくとも一つの目標に送信される。一度目標に分散された放射が受信されると、放射のチャープがパラメータcjを有する位相関数Φ(t)によりモデル化される。それにより、線形輪郭からチャープの偏差の表現が可能となる。表現のため使用されるパラメータは、少なくとも部分的に測定から決定されるか、あるいは、数値の信号処理中に概算される。  (もっと読む)
(もっと読む)
反射光解析装置
【課題】 送信光の揺らぎの影響を除去し、さらに逐次距離が変化する物体に対して反射光解析を行うことができる。
【解決手段】 レーザ光発生部11によりレーザ光パルスを測定対象に照射し、送信レーザ光検知部15で送信光パルスを検知し、減光導光部14にて送信光パルスを送信レーザ光検知部15で飽和しないレベルに減光し、受信レーザ光検知部12にて測定対象からの受信光パルスを所定のゲインで検知し、測距部16で送信光パルスと受信光パルスの時間差から測定対象までの距離を算出し、演算部13にてその距離情報、送信光パルス及び受信光パルスから反射光データと受信レーザ光検知部12に設定するゲインを計算する。反射光データを対応する送信光パルスの振幅で規格化し、受信光パルスから送信光パルスの揺らぎ成分を相殺する。さらに、測定対象の距離情報から粗精度のゲインを設定し、飽和しない範囲で取得したデータの統計量から精密なゲインを算出する。
(もっと読む)
デジタル通信処理技術を用いて媒体の光学特性を測定するための方法およびシステム
媒体(30)の特性を測定するためのシステム(20)は、CW搬送波を形成するための電磁発生器(26)と、デジタルメッセージを形成するためのデジタル符号器(24)と、デジタル変調されたCW搬送波を形成すべくデジタルメッセージでCW搬送波を変調するための変調器(28)と、を含む。媒体(30)は、デジタル変調されたCW搬送波を伝搬させるためのチャネルを提供する。該システムは、伝搬されたデジタル変調CW搬送波を受信するように構成された受信機(32)と、媒体の少なくとも1つの特性を測定するためのプロセッサ(56)と、をさらに含む。媒体(30)は、気体雰囲気、水域、または実験室のセル内に配置できる。
 (もっと読む)
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
101 - 110 / 110
[ Back to top ]