
Fターム[5J084CA24]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491) | 位相比較、位相検出 (110)
Fターム[5J084CA24]に分類される特許
1 - 20 / 110
距離計測方法および装置とそれを搭載した形状計測装置
光3次元カメラ
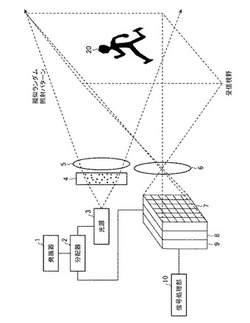
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
距離画像生成装置および距離画像生成方法

【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
光走査装置
【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
光波距離計
【課題】発光量調節に機械的駆動を用いず、かつ光量調節作業を繰り返すことなく受光光量が最適に調整される光波距離計を提供する。
【解決手段】所定の固定抵抗値を持つ抵抗器を抵抗値大から小にかけて複数設けて、演算処理部において、受光信号振幅を見ながらそのうちの一を光送出手段に選択的に負荷する構成とした。演算処理部において、信号変換手段に入力される受光信号振幅が、最大入力値以上と判定された場合には、最大入力値未満となるまで現段階の発光量より小さい発光量に下げるように信号選択を繰り返し、最大入力値以上と判定された場合には、最大入力値を超えない最大の発光量となるまで現発光量より大きい発光量に上げるように信号選択を繰り返すことで、断続的な複数パターンの発光量の中から最適な発光量が決定され、その信号選択回数は最大でも用意した抵抗器数と同じ回数で済み、光量調節作業が大幅に早くなる。
(もっと読む)
光波距離計
【課題】電気部品等の温度位相ドリフトや受光部(電気回路)を異にすることで生じる原因不明な位相ドリフトによる測距値誤差を大幅に低減した光波距離計を提供する。
【解決手段】2つの発光素子6,8と、2つの受光素子40,60と受光素子40に接続された第1の受光部300と受光素子60に接続された第2の受光部400と発光素子6,8の発光を切り換える発光切換手段4と第2の受光部400を経た信号を帰還して安定状態で再出力するPLL制御回路100と、を備える。発光素子6,8を択一発光させ、発光素子6,8,受光素子40,60等の温度位相ドリフト及び受光部300,400(電気回路)が異なることによる位相ドリフトを含む信号を故意にPLL制御回路100の整調用信号として用い周波数変換器48,68に入力することで、測距信号と参照信号の位相差をとると、既知の固定位相ドリフトのみが残り、原因不明な位相ドリフトは除去される。
(もっと読む)
距離画像生成装置
【課題】精度の高い距離画像を生成することができる距離画像生成装置の提供。
【解決手段】変調した変調光を照射する発光源と、対象物で反射した反射光を受光して電荷に変換する複数の光電変換素子、前記光電変換素子ごとに設けられた複数の電荷蓄積部、及び、前記光電変換素子により変換された電荷を前記複数の電荷蓄積部に振り分ける手段と、を備えた撮像素子と、電荷に基づいて所定演算を行い、画素値が距離値である距離画像を生成する距離画像生成部と、光量を調整する光量調整手段と、電荷に基づいて、対象物で反射した反射光成分の振幅値を演算する演算手段と、前記光電変換素子の数をカウントするカウント手段と、を備え、前記光量調整手段は、前記カウント手段によりカウントされた光電変換素子の数が一定数を越えたとき、前記発光源の変調光の光量を下げるように調整する。
(もっと読む)
指示位置検出装置
【課題】使用環境の制約が少なく、簡易な構成の指示位置検出装置により、安価に精度良く入力操作を検出する。
【解決手段】本発明は、入力面上での操作者による指示位置を、距離センサを用いた検出装置で検出する。指示位置は、光飛行型距離センサが算出した、検出装置から認識対象物までの距離値と、各距離値を得た素子位置とにより特定する。光飛行型距離センサには、電荷振分け型の撮像素子を用い、高周波成分のみ抽出し、距離値を算出する。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
レーザレーダ装置およびレーザ合成開口レーダ装置
【課題】レーザレーダ装置(ライダ装置)において、測定可能距離を長くすると共に、距離測定分解能を向上させることを目的とする。
【解決手段】時間変化に対し周波数が変化する検出用信号を生成する検出用信号生成部12と、検出用信号によって発振光を変調するレーザ発振・変調部14と、レーザ発振・変調部14によって変調されたレーザ光を送信する送信光学系17と、レーザ反射光を受信する受信光学系18と、受信されたレーザ反射光に対し復調を行う復調部20と、復調された復調信号とのタイミングを、レーザレーダ装置10の位置に応じて調整する遅延時間設定部24と、遅延時間設定部24によってタイミングが調整された参照用信号を生成する参照用信号生成部13、および参照用信号と復調信号との差異を示す差異信号を生成する差異信号生成部22と、差異信号に基づいて、目標物の情報を取得する情報記録・処理部30とを備える。
(もっと読む)
光波距離計
【課題】フィルタ位置設定時間が長引くことなく、測距時間も短縮できる光波距離計の提供。
【解決手段】測距光路23間に受光光量調節用の可変濃度フィルタ25が配置された位相差方式の光波距離計において、測定ごとに測距値、可変濃度フィルタ25のフィルタ位置、測距信号の信号棄却率を記憶手段51に記憶しておき、測定時には演算処理部50で、測距信号のサンプリングから算出したサンプル測距値と記憶手段51内の測距値とを比較して、差異が1m以下であるときは、その中で最も閉じられたフィルタ位置に可変濃度フィルタ25を設定し、さらに該フィルタ位置での信号棄却率が0%ならそのフィルタ位置のまま、棄却率が0%でないときはそのフィルタ位置よりも若干濃度を濃くして測距を開始するフィルタ位置調節手段を設けた。
フィルタ位置調節は数回で済み、最適なフィルタ位置に決まるので信号棄却率が下がり測距回数を減らせるため、結果的に測距時間が短縮できる。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
車両感知器
【課題】併設される際の干渉を防止するともに、ハードウェア構成を共通とした車両感知器の実現。
【解決手段】車両感知器100は、位相差方式の光波距離センサである距離センサ10を内蔵し、この距離センサ10による計測距離Lに基づいて、車両の有無を判定する。距離センサ10では、分周器14の分周比Nを変更することで、送信波の周波数を変更できるとともに、2位相ロックインアンプ30によって、受信信号から、送信波の周波数と同じ反射波の信号のみを抽出することができる。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
1 - 20 / 110
[ Back to top ]