
Fターム[5J084CA22]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491)
Fターム[5J084CA22]の下位に属するFターム
Fターム[5J084CA22]に分類される特許
81 - 100 / 110
測距装置
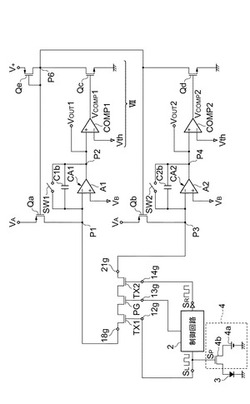
【課題】 出力飽和を抑制しつつ、正確な測距が可能な測距装置を提供する。
【解決手段】 測距装置は、変調した光を対象物Hに照射し、対象物Hで反射された光の入射に応答して発生したキャリアを時分割で振り分け、振り分けられたキャリアの電荷量に基づいて、対象物Hまでの距離dを求める測距装置において、振り分けられたキャリアをそれぞれ蓄積する複数のキャパシタC1b,C2bと、キャパシタC1b,C2bに蓄積されたキャリアの電荷量に対応する出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えたかどうかを判定する比較器COMP1,COMP2と、出力電圧VOUT1,VOUT2のいずれかが、閾値Vthを超えた旨を、比較器COMP1,COMP2が示す場合には、それぞれのキャパシタC1b,C2bの入力側端子P1,P3を、それぞれのキャパシタC1b,C2bの蓄積電荷量が減少するよう、一定電位VAに接続するスイッチQa,Qbを備えている。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両

【課題】計測対象空間内の被検物の距離情報、例えばその被検物が計測装置からある特定の距離だけ離れているかどうかを高速に計測する。
【解決手段】投光器1L,1Rは、計測対象空間内に照射光L11〜L13およびL21〜L23を交差するように、かつそれらの交点からの反射光のパルス間隔が交点までの距離に対応する時間間隔となるようにパルス光を投光する。撮像素子2は、計測対象空間内の被検物からの反射光を検出してその被検物の像を複数回撮像する。同期検波部33Aは、複数枚の画像における各画素から出力される時系列画素信号の中から、計測対象である交点までの距離に対応するパルス間隔を持つ時系列画素信号を検出する。
(もっと読む)
セミアクティブ式誘導装置
【課題】レーザー光の照射時間を短くし、高精度の誘導を行なうセミアクティブ式誘導装置を提供する。
【解決手段】飛しょう体に搭載される誘導装置本体は、パルス光の反射光から追跡目標を抽出するパルス同期反射光抽出部と、追跡目標に反射した可視光又は赤外線のから追跡目標を抽出する光源抽出部とを備える。追跡目標が遠距離にある場合にはパルス光に同期したパルス同期画像を基に誘導開始時に追跡目標を判定し、追跡目標が追跡目標に反射した可視光又は赤外線の撮像画像から判定するに十分な距離に近づいたとき可視光又は赤外線の撮像画像から追跡目標を判定するように選択を切替える。
(もっと読む)
航空機用水面及び地面観測装置
【課題】本発明の目的課題は、広範囲で且つ必要な領域の水面の波又は地面の状態及び水面の流速を観測できる装置、並びにその装置を利用した航空機の着水又は着陸支援装置を提供することにある。
【解決手段】本発明の航空機用水面及び地面観測装置は、レーザ光送信機及び受信機を航空機に搭載し、前記レーザ光送受信機は機体に対し送受信方向を少なくとも下方向、下前方向、下横方向に設定可能な機構を備えると共に、その角度情報と送受信レーザ光のデータを蓄積する手段と、データ処理する手段とを備えたものとした。
(もっと読む)
投光装置
【課題】投射光軸の走査振幅及び光軸調整を容易に行い、且つ高い調整精度を得ることのできる光レーダ用の投光装置を提供することである。
【解決手段】レーザダイオード31が放射した光線の投射方向が投射レンズ37で設定される。この投射レンズ37の位置は位置検出器43a、43bで検出される。上記光線の投光方向はスキャナ制御部25によって投射レンズ37の位置に変換される。上記スキャナ制御部25により得られた投射レンズ37の目標位置と、位置検出器43a、43bで検出された投射レンズ37の検出位置を基に、アクチュエータ40の駆動がスキャナ制御部25によって制御される。上記光線の特定の目標投射方向に対する投光装置の投射方向のずれは、スキャナ制御部25内のメモリ53に補正値として記憶され、この補正値でもって補正されて投射レンズ37の位置に変換される。
(もっと読む)
撮影装置および方法並びにプログラム
【課題】TOF方式において測距を行う場合に、正確に測距を行うことができるようにする。
【解決手段】光学的距離算出部52が、被写体に光を照射し、光の被写体による反射光を撮像系20により検出し、光が出射されてからその反射光が撮像系20により検出されるまでの時間に基づいて被写体の光学的な被写体距離を算出する。この光学的な被写体距離を算出するに際し、発光部41A,41Bから波長が異なる複数の光を被写体に照射する。そして、撮像系20が複数の光の被写体による反射光を異なる波長毎に受光する。強度取得部50が、受光した反射光の強度を取得する。
(もっと読む)
距離画像作成装置及び方法
【課題】外光の光成分の影響を受けることなく距離画像を作成する。
【解決手段】 LED10から検出光を距離の測定対象である被写体に向けて照射する。高速シャッタ22,32は、検出光の照射タイミングに同期した期間だけ開いて被写体により反射された検出光を各23,33に入射させる。第1イメージセンサ23は、検出光の波長を含む波長域を透過する第1BPF21を透過した光を受光する。第2イメージセンサ33は、第1BPF21の透過波長域の近傍の波長域を透過する第2BPF31を透過した光を受光する。第2BPF31は、第1イメージセンサ23が受光する外光成分と同じ受光量で第2イメージセンサ33が外光成分を受光するようにしてある。第1イメージセンサ23の画素値から第2イメージセンサ33の画素値を減算することで、外光成分を排除し、画素値によって被写体までの距離を表す距離画像を作成する。
(もっと読む)
距離・速度計および距離・速度計測方法
【課題】自己結合型のレーザ計測器の利点を活かしつつ、測定対象との距離と測定対象の速度を外乱光の影響を除去して計測する。
【解決手段】距離・速度計は、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間が交互に存在し、かつ発振波形の周波数が周期毎に変化するように、半導体レーザ1の発振波長を変調するレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2と、フォトダイオード2の出力に含まれる外乱光の成分を除去し、除去後の出力に含まれる干渉の情報を発振波形の周波数が基準周波数のときの値に換算し、半導体レーザ1の出力光と測定対象12からの戻り光との干渉に基づくパルスの数を求める計数手段5〜8と、半導体レーザ1の最小発振波長と最大発振波長と計数結果から測定対象11との距離及び測定対象11の速度を算出する演算手段9とを有する。
(もっと読む)
高炉炉体のセメント吹付け厚さと跳ね返り量の測定方法
【課題】 高炉内のセメント吹付け効果を評価する、および高炉の炉壁残厚を測定する。
【解決手段】 高炉内のセメント吹付け効果を評価する方法は、(a)高炉の内壁の外形に対する第一回の3次元点群を測定取得するステップと、(b)高炉の内壁に対してセメント吹付け作業を行うステップと、(c)高炉の内壁にセメント吹付けをした後の外形に対する第二回の3次元点群を測定取得するステップと、(d)ステップ(a)の第一回の3次元点群とステップ(c)の第二回の3次元点群を比較して、セメント吹付けの厚さを求めるステップと、を含む。これによって、セメント吹付け品質に厚さが均一ではない状況がないかを検査することができる。
(もっと読む)
距離計測装置
【課題】背景光の影響を確実に排除する。
【解決手段】本発明の距離計測装置1は、計測対象物3に光を照射する照明手段2と、計測対象物3からの反射光を受光する受光手段4と、照明手段2が計測対象物3に光を照射していない時の受光手段4の受光データを背景光情報として記憶する背景光情報記憶手段7a,7bと、照明手段2が計測対象物3に光を照射している時の受光手段4の受光データを計測光情報とし、該計測光情報から背景光情報記憶手段7a,7bにおいて記憶した背景光情報を減じて差を算出する差分処理手段6と、差分処理手段6により算出した差が閾値以下の場合に計測不能と判定する計測可否判定手段6とを備えていることを特徴とする。
(もっと読む)
反射型光電センサ
【課題】応差性能の悪化を避けつつ設定距離が長距離化された反射型光電センサを提供する。
【解決手段】被検出物体までの距離を検出する反射型光電センサであって、被検出物体からの反射光を第1、第2の受光領域で受光する光検出器20と、被検出物体に向けて光を投光する投光素子(LED)14とを備える。投光素子14は、第1、第2の受光領域における受光量差がゼロになる距離(設定距離)から被検出物体が遠近方向に動いた場合の受光量差の変動量が最大となるように、投光軸まわりに回転させた回転角が決定されている。
(もっと読む)
測距装置
【課題】高精度に目標との距離を得ることができる測距装置を提供する。
【解決手段】光を受光し、光の強さに応じたレベルの信号を出力する受光手段と、受光手段に対し直接発光する第1の発光手段と、受光手段が目標からの反射光を受光可能なように、目標に対し発光する第2の発光手段と、受光手段が受光したタイミングを、受光手段が出力した信号に基づいて取得すると共に、第1の発光手段及び第2の発光手段の発光の開始及び停止の制御を行う制御手段と、を有し、制御手段は、第1の発光手段を所定時間発光させることにより受光手段が受光した第1のタイミングを取得し、第1の発光手段の発光を停止させた後に第2の発光手段を発光させることによる反射光を受光手段が受光した第2のタイミングを取得し、第1のタイミング、第2のタイミング及び所定時間に基づいて目標との距離を算出する。
(もっと読む)
最小値サンプリングを用いた信号復元装置および方法
本発明は、最小値サンプリングを用いた信号復元装置および方法に関するものであって、より詳細には入力信号に対して最小値サンプリングを行う場合に発生するエイリアシング(Aliasing)によって信号復元時発生する劣化を効果的に防止できる最小値サンプリングを用いた信号復元装置および方法に関するものである。
本発明の実施形態による最小値サンプリングを用いた信号復元装置は、入力信号に対して最小値サンプリングを行うサンプリング部と、前記入力信号に対して所定のサンプル区間における最小値サンプリングによってサンプリングされたサンプル値が保存される保存部と、前記サンプル区間において前記サンプル値の位置を判断する位置判断部、および前記判断された位置に応じて前記保存されたサンプル値により、前記入力された信号を復元する復元部とを含む。  (もっと読む)
(もっと読む)
半導体レーザデジタル振動計測装置
【課題】光学系及び信号処理系を簡略化し、小型軽量化した半導体レーザデジタル振動計測装置で発生するミスカウントを抑止して正確な振動測定を提供し、かつ振動の特性を抽出することを目的とする。
【解決手段】レーザ発振周波数が固定された半導体レーザと、該半導体レーザダイオードの射出光を振動体表面に照射し、その戻り光が該半導体レーザに結合すべく配置された光学素子と、該振動体変位に関係して生じる半導体レーザ出力を検出する受光素子とを有する光学ヘッド部分と、該半導体レーザに電流を供給する働きと、該受光素子出力から信号成分を検出する回路と、該検出部出力を変換するA/D変換器と、ドップラビート波数を計数する働きと、該検出部出力から変位方向を判別しカウントする働きと、該カウンタ部の計数値を演算し計測する回路と、比較回路を制御しかつ振動波形の特徴を抽出するプログラムとから構成した。
(もっと読む)
追尾式レーザ干渉計の絶対距離推定方法及び追尾式レーザ干渉計
【課題】オペレータに煩雑な原点復帰の作業を強いたり、高価な絶対距離センサを付加したりすることなく、装置と再帰的反射体との距離に応じて追尾制御の制御量を適切に増減できるようにする。
【解決手段】入射された測定光Aを入射方向に反射して戻すための再帰的反射体70と、測定光Aと戻り光Bの光軸が平行となるように測定光Aの出射方向を回動する2軸回転機構40を有し、装置と再帰的反射体70の距離の増減に応じて測定値を出力する追尾式レーザ干渉計と、再帰的反射体70との間の絶対距離Lを推定する際に、再帰的反射体70からの戻り光Bの所定位置からのずれ量dを所定値d2とした時の2軸回転機構40の角度位置変化量θ2により、装置と再帰的反射体70の絶対距離Lを演算により推定する。
(もっと読む)
3次元測定装置及び3次元測定装置を搭載した自律移動装置
【課題】 本発明は、測定目的等に応じて測定条件を変更することができる3次元測定装置を提供することを目的とする。
【解決手段】 本発明の3次元測定装置18は、距離データを測定するレーザレンジセンサ20と、レーザレンジセンサ20を回転させる回転装置30と、回転装置30の回転角を検出するエンコーダ38と、レーザレンジセンサ20とエンコーダ38に接続された演算部52aと、回転周期を設定する設定手段52cと、設定された回転周期で回転装置30を駆動する回転制御部52bとを有する。
(もっと読む)
移動車両
【課題】自律的に移動する移動車両において、低コストで簡単な構成により、障害物や床面の起伏を検知して安全に停止可能とする。
【解決手段】移動車両1は、駆動部2と、測定面S内における障害物までの距離を検知する2次元センサ3と、2次元センサ3の検出出力に基づいて回避不能な障害物が走行方向前方に存在することが判明したとき駆動部2を制御して走行を停止させる停止手段4と、を備える。2次元センサ3は、前方の走行路面10と測定面Sとが走行方向前方の障害物回避に必要な距離dだけ離れた位置において交差するように下方に向けて設置され、2次元センサ3による距離測定範囲が移動車両1の車幅Wに左右の余裕幅αを加えた範囲内であり、停止手段4は、2次元センサ3により検知された距離が走行路面10と2次元の測定面Sとが交差する位置を示す距離でないとき移動車両1の走行を停止する。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するためのシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
変位測定装置
【課題】被測定物測定時における受光量の変動に影響されず変位量を正確に測定する。
【解決手段】被測定物の測定中に演算手段11に入力される受光量信号のレベルが所定の閾値を越える毎に対応してゲイン初期状態で最も高いゲインが設定された増幅器10のゲインを1段づつ段階的に下げるゲイン選択手段12による制御と、演算手段11に入力された受光量信号のレベルに基づいて光源駆動回路5の投光パワーを現在の段階から1段づつ下げる投光パワー選択手段20による制御とは、いずれか一つが切替自在に、あるいはいずれも同時に実行される。
(もっと読む)
車両用走行支援装置
【課題】
運転者の認知・判断・操作を補助する車両用走行支援装置において、障害物の色や濃淡等の色情報を参照することにより、光センサや画像センサ等で障害物を確実に精度よく短時間で検出できるようにすることを課題とする。
【解決手段】
自車両の周囲の障害物を検出する車両用走行支援装置1は、障害物を検出するための光センサ11や画像センサ12と、障害物から送信される信号を受信する車車間通信用アンテナ13やICタグ信号受信用アンテナ14と、該アンテナ13,14で受信された信号に含まれる障害物の色情報に基いて、前記センサ11,12の検出動作を変更するコントロールユニット10とを備えている。
(もっと読む)
81 - 100 / 110
[ Back to top ]