
Fターム[5J084CA22]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491)
Fターム[5J084CA22]の下位に属するFターム
Fターム[5J084CA22]に分類される特許
41 - 60 / 110
深さセンサーの深さ推定方法及びその記録媒体

【課題】対象物体までの深さ計算時に漏れたフレーム信号によるエラーを補償することができる深さセンサーを利用した深さ推定方法を提供する。
【解決手段】光信号を対象物体に放射する段階と、対象物体から反射される光信号及び深さピクセルに印加され一定の位相差で周期的に印加される複数のゲート信号に基づいて複数のフレーム信号を発生させ、複数のフレーム信号及び複数のフレーム信号のそれぞれのフレーム情報を対象物体までの深さ推定のために提供する段階と、複数の提供されたフレーム信号のうちから漏れたフレーム信号の有無及び複数の提供されたフレーム信号の連続パターンを考慮して、複数の提供されたフレーム信号をそれぞれがエラーなしに、対象物体までの深さの推定に利用される複数のフレーム信号グループにグループ化する段階と、複数のフレーム信号グループのそれぞれを用いて、前記対象物体までの深さを推定する段階とを有する。
(もっと読む)
距離測定装置

【課題】測距対象物の誤認識を防止することができる距離測定装置を提供する。
【解決手段】距離測定装置10は、垂直方向に隣接する計測点までの水平方向の距離差が閾値より小さい場合に、所定の高さを有する測距対象物が存在すると判定する距離測定装置において、任意の測定点に対して距離を測定する測距部1と、測距部1による測定誤差、及び計測点の候補を記憶する記憶部2と、記憶部2により記憶された計測点の候補の中から、記憶部2により記憶された測定誤差による距離差の最大値よりも閾値の方が大きくなるものを計測点として選択決定する選択部3と、を備える。これにより、所望の測距対象物であっても測定誤差のために測距対象として判定されず誤認識してしまうことを防止することが可能になる。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】所定の回動角度において検出される受光波形が前回の同一回動角度において検出された波形に一致するとみなされる検出状態が継続して検出される場合に、この受光波形がその回動角度の背景波形として設定される。そして、遠距離側の受光波形の検出時間Tfがその回動角度における背景波形の検出時間Toに相当する、2つの波形が検出されるとき、この遠距離側の受光波形と背景波形との比率に基づいて、近距離側の受光波形に応じて検出される検出物体の回動方向長さが演算されて測定される。
(もっと読む)
レーザデータのフィルタリング方法及び装置
【課題】信頼性の高いレーザデータのフィルタリング方法の提供を目的とする。
【解決手段】上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・を対象とし、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出する。
(もっと読む)
積雪深計測システム
【課題】本発明は、高い精度で計測でき且つ安全性の向上が図られ、積雪深の測定
結果を階的に警報出力できるものである。
【解決手段】
本発明は図1に示すように、積雪の表面に向けたスキャナより、レーザ光線を発光
させ、扇状に往復走査し、雪による反射光がスキャナに戻り受光するまでの位相差を
検出して距離を測定し、その距離データを送信するセンサー部と、前記センサー
部から受信した距離データを積雪深データに変える演算手段と、積雪深データを
出力する機能と、予め積雪深データの設定値を信号出力する機能を持つ処理部
からなる積雪深計測システム。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を追従して検出しているときに検出対象が突然消えたりして、その後以降の走査周期にて突然現れたりしても、これらが関連する検出対象であることを確実に判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】レーザ光出射部2と、反射レーザ光に対応した受光情報を出力する受光部3と、受光情報を走査周期ごとに記憶する記憶部5と、受光情報に基づき、前回の走査周期で検出された検出対象が今回の走査周期で検出されているか否かを判別する判別部12と、判別部12の判別結果が否の場合に、検出対象を消失した検出対象として一時的に記憶する一時消失データベース11と、受光部3から受け取った次回以降の受光情報に新たな検出対象が存在する場合に、新たな検出対象が消失した検出対象と同一であるか否かを判定条件に基づいて判定するための判定部とを備えている。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
物体認識装置、プログラム
【課題】様々な大きさの物体を精度よく検出する物体認識装置及びプログラムを提供する。
【解決手段】受光信号の受信強度分布をセグメント化し(S110〜S130)、セグメントが過大セグメントである場合に、セグメントのピークの受信強度Apに、物体までの距離に応じて近距離であるほど小さな値となる閾値係数αを乗じることで領域抽出閾値THaを求め(S140〜S200)、その領域抽出閾値THaより信号強度が大きいセグメント内の領域の幅を、セグメントが表す物体の幅に設定する(S210)。これにより閾値係数α(ひいては領域抽出閾値THa)が大きくなる遠距離では、ビームのすそ野部分の影響が極力排除されるため、物体の幅が過大に検出されることがなく、閾値係数αが小さくなる近距離では、すそ野部分の一部を物体が存在する領域として取り込むことになるため、端ビームが無視されても物体の幅が実際より小さく検出されることがない。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 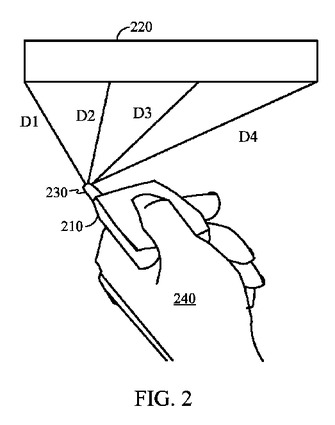 (もっと読む)
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
過冷却浮遊水滴のための飛行中に働く複数視野の検出器
【課題】本装置は、浮遊水滴の存在を検出し、かつ、レーザビームが雲を貫通したとき、そのビームの横方向散乱を測定することによって、それら水滴の直径のプロファイルを反映した情報を提供する。
【解決手段】飛行中に働く複数視野の水滴センサは、照射部と検出部とを備える。照射部は、光ビームを出力するように構成された、第1の光学的ビームエミッタを備える。検出部は、後方散乱光の第1の部分を、サークルツウライン変換器の内側反射面に向けて導くように構成された万華鏡と、サークルツウライン変換器によって反射された光を受光するように構成された、少なくとも第1の検出器を有する複数視野のサブシステムと、後方散乱光の第2の部分を受光するように構成された単一視野のサブシステムとを備え、第2の部分は、サークルツウライン変換器によって反射されていない。単一視野のサブシステムは、単一視野中の情報に基づき、液体水滴と氷晶の間を区別するためのデュアルチャネル円偏光検出器を備えることができる。
(もっと読む)
カラー式対象物表示システム
【課題】周囲の対象物をカラー画像として表示可能であり、しかも対象物までの距離が所定の距離より近いことを瞬時に認識できるように表示できるカラー式対象物表示システムを得る。
【解決手段】R画素、G画素、及び、B画素を有するカラー式CMOSセンサ19と、CMOSセンサが受光した赤外光に基づいて対象物までの距離が設定距離範囲にあるかを判定する距離判定手段22と、R画素、G画素、及び、B画素の電気信号に基づくカラー画像と、距離判定手段の判定結果に基づく判定結果画像とを交互に生成する画像処理手段23と、時間残像現象が生じ得る時間間隔でカラー画像と判定結果画像を交互に表示するモニタ24と、を備える。
(もっと読む)
光測距装置
【課題】素子温度の変化に対して光検出器の増倍率を精度よく安定化させることができ、以って、高い測距精度を安定して維持できる光測距装置を提供する。
【解決手段】測距用光源2からのレーザ光を、ビームスプリッタ6,7を介して発光モニタ用光検出器(フォトダイオードPD)9に受光させ、更に、ビームスプリッタ6,7及び反射ミラー11を介して測距用光検出器(アバランシェフォトダイオードAPD)4に受光させる。そして、発光モニタ用光検出器(PD)9の出力Voと測距用光検出器(APD)4の出力Vxとの比(増倍率)Mxを求め、前記比(増倍率)Mxが目標値Mに近づくように、測距用光検出器(APD)4のバイアス電圧を補正する。
(もっと読む)
飛行機の識別及びドッキング誘導装置
【課題】飛行機のドッキング中の事故を防止し得るように飛行機の検出を改良すること。
【解決手段】ゲートに近づきつつある飛行機(12)を特定するために、レーザー距離計(LRF)(20)が使用される。LRF(20)は飛行機(12)に向けられており、エコーから輪郭を得て、公知の輪郭と比較される。類似した輪郭を有する飛行機(12)から区別するために、LRFは、エンジンのような構造があると予想される容積及びエンジンがないと予想される別の容積に向けられる。これらの2つの容積からのエコーは、エンジンが予期した場所にあるか否かを決定するために使用される。エンジンがある場合には、飛行機(12)は正しい機種のものであるとして特定され且つゲート(16)に入ることを許容される。そうでない場合には、飛行機(12)は止められる。機首の高さは、更に別の特定のための判定基準として使用することができる。
(もっと読む)
車両渋滞検出装置
【課題】車両の渋滞の末尾位置を精度良く検出することが可能であり、光量の少ない環境でも渋滞を検出することが可能であり、さらに従来よりも短い時間毎の渋滞を検出することが出来る車両渋滞検出装置を提供することを目的とする。
【解決手段】車両渋滞検出装置が、所定の領域を走査するレーザレーダセンサと、レーザレーダセンサの検出結果に基づく距離情報と、レーザレーダセンサの走査方向の情報とからレーダ情報を生成し、レーダ情報から所定の領域内に存在する車両を検出し、進行方向側の車両から進行方向逆側の車両までを順番に渋滞車両であるか否か判定し、車両が渋滞車両であると判定した場合に当該車両の位置を渋滞末尾位置として指定することによって進行方向逆側末尾の渋滞車両の位置を渋滞末尾位置として最終的に指定する制御部を具備する。
(もっと読む)
レーザ3次元画像計測装置
【課題】得られた強度及び距離データから強度データの誤検出データを除去し距離データ精度を向上させターゲットの高精度3次元画像を得るレーザ3次元画像計測装置の提供。
【解決手段】レーザ送受信手段で基準クロック信号に同期させかつスキャンさせてレーザを照射しターゲットからの反射光を受信し、クロック信号に同期して反射光の電気信号を取り込み、取り込んだ電気信号からターゲットからの反射光の強度とターゲットまでの距離をそれぞれ演算し強度・距離データを出力し、強度・距離データから誤検出データ指標となる強度・距離フィルタリングデータを算出して、強度・距離フィルタリングデータからしきい値演算を行い条件を満たなさない誤検出データを除去した誤検出データ除去データを算出し、誤検出データ除去データの距離データとレーザ照射角度情報からターゲットを含む3次元画像を算出する。
(もっと読む)
光学デバイス、この光学デバイスを用いた物体検出方法及び電子機器
【課題】検出対象物の近接を検出できる光学デバイス、これを用いた物体検出方法及び電子機器を提供する。
【解決手段】赤外LEDと、反射光の光量及びスポット位置を示す信号を出力するCMOSイメージセンサと、出力された信号をアンプするとともに信号処理を実施する信号処理部20と、反射率ごとの検出物距離と受光量との関係、第1基準値及び第2基準値を示すデータが格納されたデータベース記憶部30とを備えたものであり、信号処理部20は、スポット位置に基づいて検出物距離を算出する第1信号処理と、検出物距離及び反射光の光量を反射率ごとの検出物距離と受光量との関係と比較して検出物の反射率を求める第2信号処理と、当該反射率が第1基準値と一致するか判断する第3信号処理と、一致する場合に検出物距離が第2基準値と一致するか判断する第4信号処理と、一致する場合に検出対象物の近接を示す信号を出力する第5信号処理とを実施する。
(もっと読む)
人体存在検知装置及び人体存在検知方法
【課題】低コストで実現可能であると共に、人体が存在するか否かの検知を、操作者である人体が操作する電子機器等の制御に適合しやすい人体存在検知装置を、提供する。
【解決手段】基準位置から一定距離内に、人体が存在するか否かの判断を行う機能を備えた人体存在検知装置1を、基準位置から一定方向に存在する人体または物の存在位置に対する基準位置からの離間距離を一定時間経過毎に測定する離間距離測定手段2、該測定された離間距離に基づき一定距離内外判定結果と動静判定結果とを形成する判定結果形成手段3、該一定距離内外判定結果と、該動静判定結果とで構成される検知状態情報を形成する検知状態情報形成手段4、該検知状態情報に基づき状態遷移パターンを形成する状態遷移パターン形成手段5、及び、該状態遷移パターンに基づき、基準位置から一定距離内に、人体が存在するか否かを判断する判断手段6で構成する。
(もっと読む)
レーザーによる測距方法
【課題】
従来のレーザーを用いた距離測定方法は、出射したレーザー光が被測定物で反射して戻って来る迄の時間を計って測距するものである。そのため測距精度はレーザー光の波長には遠く及ばない。また、レーザー光の特徴である可干渉性を利用した測定方法では、距離の変化量は波長程度の誤差で測定できるが、距離は分らない。
【解決手段】
本発明はレーザーの特徴である可干渉性を利用し、測距精度を波長程度、あるいは位相を考慮する事により波長以下にまで高めるものであり、その方法は発振波長の異なる2つ以上のレーザー光を用い、それぞれを参照光と測定光に分け、参照光と測距物から反射して来た測定光を干渉させ、参照光或いは測定光の伝播距離を変化させる事により光路差を変えていくとそれぞれのレーザー光はそれぞれの周期で干渉による明暗をつくるので重ね合わせた明暗の間隔を測ることによって測距物までの距離を知るものである。
(もっと読む)
41 - 60 / 110
[ Back to top ]