
Fターム[5J084CA22]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491)
Fターム[5J084CA22]の下位に属するFターム
Fターム[5J084CA22]に分類される特許
21 - 40 / 110
監視方法及び監視装置
【課題】監視範囲が遠距離まで設定されている場合であっても、精度よく監視範囲内における物体を検出することができる監視方法及び監視装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を垂直方向に走査させる垂直スキャナ12と、レーザ光を水平方向に走査させる水平スキャナ13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から物体の距離を算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、を有し、監視範囲Sは水平スキャナ13の上死点又は下死点を基準にして設定され、垂直スキャナ12は水平スキャナ13よりも走査速度が高速に設定されている。
(もっと読む)
距離速度測定装置

【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
光調整装置、光検出装置、及び距離測定装置
【課題】入射光が著しく強い場合があっても、信号光を正しく検出することができるようにする。
【解決手段】光分離器62によって、反射光パルスを分離し、PD64によって、分離された反射光パルスの一方を検出する。作動制御回路70によって、PD64からの検出信号が閾値以上である場合に、光を遮断するように光調整器68を作動させる。一方、分離された反射光パルスの他方が、延滞機構66を通過して、光調整器68が作動したころに光調整器68に入射される。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
歩行者検出装置
【課題】検出点群から歩行者を高精度に検出する歩行者検出装置を提供することを課題とする。
【解決手段】検出手段によって検出された検出点を複数の検出点群としてグループ化し、それらの検出点群D4から歩行者を検出する歩行者検出装置であって、検出点群D4毎に検出点群D4の移動方向(速度ベクトルD5の方向に相当)を検出する移動方向算出手段S5と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7を算出する分布情報算出手段S7と、検出点群D4毎に移動方向に対する検出点群D4の分布情報D7の時間変化に周期性があるか否かを判定し、周期性がある検出点群を歩行者と判定する判定手段S9とを備えることを特徴とする。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】ビーム照射装置は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光を受光するとともに受光したレーザ光の強度に応じた信号を出力する光検出器33と、レーザ光源21を駆動するスキャンLD駆動回路44と、レーザ光源21を制御するDSP46と、を備える。DSP46は、光検出器33から出力される信号が所定の閾値を超えると、レーザ光源21の出力を減少させる。
(もっと読む)
レーザレーダ装置
【課題】高速処理が可能なレーザレーダ装置を提供できる。
【解決手段】前方に出射したレーザ光に対して反射光の光量が所定値より小さい領域においては光走査速度を標準値より下げて検出を行い、反射光の光量が所定値より大きい領域においては光走査速度を標準値より上げて検出を行う。領域においては光走査速度が標準値より遅くなっているため、ある同じ角度範囲幅においての反射光の積算回数を、角度分解能を下げることなく基準回数より増加させることができる。これにより、歩行者など反射光量の小さい物体を感度よく検出することができる。一方、反射光の光量が大きい領域においては、光走査速度が標準値より速くし、ある同じ角度範囲幅においてのパルスの積算回数は基準回数より少なくするが、元々十分な反射光量が得られているため問題なく正確な距離・方向の検出は可能である。
(もっと読む)
ホーム事故検知システム
【課題】駅ホーム上で事故を高い精度で迅速かつ確実に自動的に検知して警報を発し、駅ホーム上で駅員の在・不在、駅ホームの混雑度に応じて自動警報を行えるホーム事故検知システムを提供する。
【解決手段】このホーム事故検知システムは、駅ホームの縁に沿って設置され、計測時刻毎に検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像の状態に係るデータを記憶する記憶手段41と、記憶手段に記憶された旅客像の状態に係るデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客像に対応する旅客に事故が発生したと判定する処理手段52と、事故発生と判定のとき自動的に警報を発する警報手段と、駅ホームに駅員が居るか否かを判定し、警報手段を自動警報不能または自動警報可能にする駅員監視手段(62,64,65)とを備える。
(もっと読む)
物体検知システム及び方法
【課題】レーザセンサから照射されるレーザビームが障害物に遮断されて物体が一時的に未検知となっても、連続性を以て同一の物体を特定する。
【解決手段】監視領域にて物体の探索をする探索空間、及び物体を検索する所定の単位のマス目からなる検索グリッドの数を物体毎に設定しておき、得られる測距データから監視領域内に存在する物体を経時的に測距する。障害物によりレーザビームが遮断されて、物体が一時的に未検知となった場合、探索空間にレーザビームを照射して物体を経時的に探索する。探索による物体の探索の対応を経時的に取りながら物体の位置の検索及び追跡し、この追跡により得られるデータを用いて、物体の軌跡を表示する。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から得られるランレングス度数分布と幾何分布との一致度から、入力信号が有効か否かを判定する有効性判定部103とを備える。有効性判定部103は、ランレングスを測定するサンプリングクロックの判定期間中の総数をNsampとしたとき、判定期間中の総度数とNsamp/2との比、あるいは判定期間中の階級値1の度数とNsamp/4との比により、入力信号が有効か否かを判定する。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
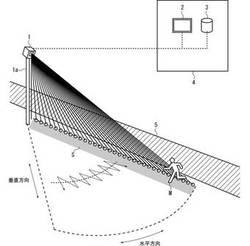
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
物体認識装置、及びプログラム
【課題】物体認識装置において、複数個の検出対象が走査方向に沿って近接している場合であっても、各検出対象の認識精度を向上させること
【解決手段】物体認識処理では、測距データ間の差が予め規定された許容値以下となる測距データによって形成される領域に含まれる測距データ群を、一つの候補領域をグループ化する(S130)。当該候補領域の大きさが規定値より大きければ(S150:YES)、当該候補領域を特別候補領域として、この特別候補領域に対応する画像データ上の対象領域に対して画像認識処理を実行し、対象領域中の検出対象の範囲を特定する(S170)。その特定した範囲に基づく検出対象の境界方位に従って、特別候補領域を分割し(S210)、その分割した新たな候補領域を含む全ての候補領域について追跡処理を実行して、候補領域の中で物体として確定すべきものと特定する(S230)。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
異物検出装置
【課題】同一捜索時間における異物の3次元形状の検出精度を向上できる異物検出装置を得る。
【解決手段】捜索対象にレーザ光を照射したときの散乱光を用いて異物を検出する異物検出装置であって、レーザ光を出力する光出力手段と、レーザ光を用いて捜索対象の捜索範囲を走査するスキャナ11と、捜索対象からの散乱光を受光する光受信機13と、レーザ光と散乱光の位相差及び散乱光の受信強度を検出する位相検波器14と、これらの検出結果に基づいて捜索範囲を絞り込んで着目領域23を抽出し、スキャンする走査線間隔を狭くしてスキャナ11に着目領域23を再走査させる制御信号を出力し、この着目領域23における位相検波器14の検出結果に基づいて3次元画像を生成するパソコン3とを備える。
(もっと読む)
21 - 40 / 110
[ Back to top ]