
Fターム[5J084CA23]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 比較手段 (491) | レベル比較 (222)
Fターム[5J084CA23]に分類される特許
1 - 20 / 222
レーザレーダ装置
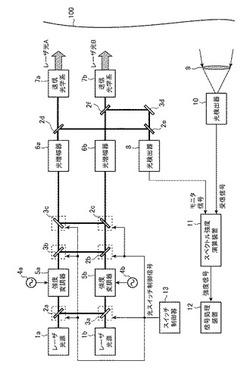
【課題】装置内における伝送効率を自動で校正することのできるレーザレーダ装置を得る。
【解決手段】光検出器8は、送信光学系7a、7bからの出射光のパワーに相当するモニタ信号を出力する。光検出器10は、測定媒質100を通過した光を受信し、その値に対応した受信信号を出力する。信号処理装置12は、送信光学系7a、7bからの出射光に対する光検出器10の結合効率を示す値に基づいて、吸収波長の大きい光の振幅または電力と吸収波長の小さい光の振幅または電力とを補正し、その差異から測定媒質100に対する光学的厚みを測定する。
(もっと読む)
距離計測装置

【課題】計測距離の精度向上を図る。
【解決手段】駆動部14によりレーザ光の照射方向が鉛直下方向になったときに計測される距離計測装置と地面との距離と、メモリに記憶された情報に基づいて特定される距離計測装置と地面との距離の差分から計測距離の総合誤差を算出し、この計測距離の総合誤差を用いて計測距離が補正する。
(もっと読む)
光3次元カメラ
【課題】近距離から遠距離まで高い測距精度を確保する。
【解決手段】ターゲット20への送信光を出力する光源3と、送信光を所定照射強度パターンとする拡散板4と、所定照射強度パターンとされた送信光に対するターゲット20からの散乱光を複数の素子で受光し、電気信号に変換する受光素子アレイ7と、電気信号から位相を検波する位相検波器アレイ8と、電気信号から強度を検出する強度検出部101と、強度に基づいて、三角測量方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部102と、位相に基づいて、TOF方式により、素子ごとにターゲット20の対応点までの距離を計測する距離検出部103と、強度に基づいて、素子ごとに距離検出部102,103による計測結果のいずれか一方を選択する判定部104と、選択された計測結果に基づいて、ターゲット20の3次元形状を計測する3次元画像出力部105とを備えた。
(もっと読む)
シーン内の対象物を3D再構成するための方法
【課題】シーン内の対象物を3D再構成するための方法を提供する。
【解決手段】ステップ1)検知された信号から、その後方散乱の強度がそれぞれ割り当てられる3Dポイントを生成し、更に3Dポイントが、再構成されたデータのセットAを形成するステップ。ステップ2)Aから開始して、対象物を含む空間内にそのポイントが配置されたデータのセットBを、空間特性F2に応じて抽出するステップ。ステップ3)Bから開始して、データのセットCを、抽出基準に応じて抽出するステップ。ステップ4)Cに基づいて、3次元表面を生成して対象物の完成データのセットDを得ることにより、喪失部分をもつ領域を埋めるステップ。ステップ5)Dに基づいて対象物を識別するステップ。ステップ5)の識別に成功しなかったとき、ステップ3)、4)および5)を新規の基準F1で繰り返す。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
測距センサを備える距離測定装置および距離測定方法
【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
情報取得装置、情報取得方法、及びタグ装置
【課題】タグ装置の消費電力を低減することができる情報取得装置を提供すること。
【解決手段】情報取得装置は、光ビームを出射する出射部と、前記出射部から出射された光ビームが物体で反射した再帰光を受光する受光部と、前記受光部により前記再帰光が受光された場合に、前記物体から送信された情報信号を受信する受信部と、前記受信部により受信された情報信号に基づき、前記物体の識別情報を取得する取得部と、を備える。
(もっと読む)
プラットホームドア用安全装置
【課題】 プラットホームドアの近傍の所定の領域内に存在する物体を従来より正確に検出することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置は、自身に対する物体の距離を受光素子の出力のピークのタイミングに基づいて取得して距離の情報をそれぞれ有する画素の集合である距離画像を生成するタイムオブフライト方式の三次元センサーと、プラットホームドアの近傍の検出領域内に存在する物体を検出する領域内物体検出手段と、領域内物体検出手段によって物体の検出に使用される画素である検出用画素を選定する検出用画素選定手段とを備えており、検出用画素選定手段は、三次元センサーによって生成された距離画像の画素のうち、その距離画像より前に三次元センサーによって生成された距離画像からの距離の変化量が所定の基準を満たす(S103でYES)画素のみを検出用画素として選定する(S104)。
(もっと読む)
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
距離測定装置
【課題】 反射光の受光レベルが飽和状態となるときでも精度良く距離を測定できる距離測定装置を提供する。
【解決手段】 距離測定装置の発光部は、測定光を被測定物に向かって出射する。受光部は、被測定物から反射される反射光を受光する。距離算出部は、測定光が出射されたときから反射光の受光レベルがピークを示す時点までの経過時間に基づいて被測定物までの距離を求める。距離補正部は、受光レベルが飽和状態となりピークの時点が特定できないときには、受光レベルが飽和している時間の長さに応じて被測定物までの距離の値を補正する。
(もっと読む)
レーザレーダシステム,及び取付方法
【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
画像形成装置
【課題】装置を使用する予定のない人を検知してしまう誤検知を抑制することをより簡易な構成で実現することができる技術を提供する。
【解決手段】記録材に画像を形成する画像形成部と、人が操作するユーザインタフェースと、画像形成部を収納する装置筐体におけるユーザインタフェースを操作する人が位置する側の外面を形成する支持部カバー500と、人を検知する第1の人検知部600と、を備え、第1の人検知部600は、ユーザインタフェースを操作する人が位置すると想定される領域に人が近づいてきたことを検知可能な向きに配置された焦電型センサ610を有し、支持部カバー500は、第1の人検知部600の手前側に配置されて焦電型センサ610の検知範囲の一部を覆うことで、第1の人検知部600の検知範囲A1を水平面に対して斜め下方の範囲に限定する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
光波距離計
【課題】発光量調節に機械的駆動を用いず、かつ光量調節作業を繰り返すことなく受光光量が最適に調整される光波距離計を提供する。
【解決手段】所定の固定抵抗値を持つ抵抗器を抵抗値大から小にかけて複数設けて、演算処理部において、受光信号振幅を見ながらそのうちの一を光送出手段に選択的に負荷する構成とした。演算処理部において、信号変換手段に入力される受光信号振幅が、最大入力値以上と判定された場合には、最大入力値未満となるまで現段階の発光量より小さい発光量に下げるように信号選択を繰り返し、最大入力値以上と判定された場合には、最大入力値を超えない最大の発光量となるまで現発光量より大きい発光量に上げるように信号選択を繰り返すことで、断続的な複数パターンの発光量の中から最適な発光量が決定され、その信号選択回数は最大でも用意した抵抗器数と同じ回数で済み、光量調節作業が大幅に早くなる。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
1 - 20 / 222
[ Back to top ]