
Fターム[5J084CA34]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 表示装置、ディスプレー (124)
Fターム[5J084CA34]に分類される特許
101 - 120 / 124
三次元レーザスキャナのスキャニング方法

【課題】三次元レーザスキャナの移動回数を低減して効率的なデータ収集を行い、データの重複部分を低減できる三次元レーザスキャナのスキャニング方法を提供する。
【解決手段】外側の計測対象物11内に内側の計測対象物31が存在する場所や、計測対象物自体にその表面に陰を及ぼす凸部が存在する場所のスキャニングを、三次元レーザスキャナを用いて行う三次元レーザスキャナのスキャニング方法において、三次元レーザスキャナ1の設置位置51を原点P0として、計測対象物11,31をスキャニングし、スキャニングによって収集された点群データの隣接する点間距離に基づいて、内側の計測対象物31あるいは凸部によって陰32となった計測対象物のデータ未収集部分4を割り出し、原点P0とデータ未収集部分4との間で、陰32を及ぼす内側の計測対象物31あるいは凸部よりもデータ未収集部分4側を、三次元レーザスキャナ1の次の設置位置と設定する。
(もっと読む)
航空機の識別およびドッキング誘導システム

【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するためのシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
監視装置
【課題】良好な画質の監視画像を得ることのできる監視装置を提供する。
【解決手段】レーザ光を出射する送光部11と、送光部11から出射された光が監視対象に到達して反射された反射光を受光し、取り込んだ反射光を画像信号に変換して出力する受光部12とを備える監視装置であって、受光部12の監視画角に基づいて、送光部11の照射領域を調節する送光レンズ制御部27を具備する監視装置を提供する。
(もっと読む)
周辺車両運動状態推定装置、自車運動状態推定装置、自車および周辺車両運動状態推定装置およびプログラム
【課題】計測機器を備えない周辺車両および自車両の挙動を解析可能にする。
【解決手段】自車および周辺車両運動状態推定装置100は、自車両に取り付けられている自車走行状態観測機器200およびビデオカメラ302と接続される。自車運動状態推定処理106は、自車走行状態観測機器200が観測した自車両の走行状態と、自車両の運動状態に関する状態遷移方程式および観測方程式とに基づき、自車両の運動状態を推定する。周辺車両相対位置推定処理108は、ビデオカメラ302が撮影した画像における周辺車両の座標と、自車両に対する周辺車両の相対運動状態に関する状態遷移方程式および観測方程式とに基づき、周辺車両の相対運動状態を推定する。座標変換処理110は、自車運動状態推定処理106の推定結果と、周辺車両相対位置推定処理108の推定結果とに基づき、周辺車両の世界座標系における運動状態を取得する。
(もっと読む)
測距装置
【課題】視野内の観察像の状態によって表示装置に表示される表示情報の輝度等を可変し、測定結果等をより視認しやすくした測距装置を提供すること。
【解決手段】接眼レンズと対物レンズを有する観察光学系7と、パルス状の測定光を目標物に向けて出射する出射装置4と、前記目標物から反射された前記測定光の反射光を受光する受光装置9と、前記測定光の発光時から前記反射光の受光時までの経過時間に基づき前記目標物までの距離を求める距離演算装置と、前記観察光学系に備えられ、前記距離演算装置で求められた結果を表示し、前記前記観察光学系で取得した観察像を透過可能な表示装置10と、前記表示装置の表示状態を制御する表示制御装置を有し、前記測定光の非発光時間に前記受光装置で受光した前記目標物の周辺光または測距装置の周辺光の信号に基づいて前記表示装置の表示状態を制御する測距装置1。
(もっと読む)
車両用レーダ装置
【課題】反射強度が低下した先行車両の検知可能距離の低下を抑制し、かつ、光学設計上の制約を少なくする。
【解決手段】距離検出を行うときには発光体140での発光を行わず、受光素子82に入射される光の強度に応じた受光信号が得られるようにし、距離検出を行わないときには発光体140での発光を行い、受光素子82における受光信号成分が一定値となるようにする。これにより、距離検出を行わないときの受光信号の波形から、一定値となる受光信号成分を差し引けば、ノイズ成分のみが残ることになる。そして、このときに得られるノイズ成分をバックグランドノイズ算出回路99で求めることにより、受光信号からノイズ成分を除去することが可能となる。これにより、レーダ装置の検知可能距離が低下することを防ぐことが可能となり、光学設計上の制約も少なくすることが可能となる。
(もっと読む)
電気光学的測定装置
本発明は、とりわけ非接触距離測定のための手持ち式装置(10)である電気光学的測定装置に関する。本発明の電気光学的測定装置は、測定信号を送信するために少なくとも1つの光学的送信器(20)を有する光学的送信経路(28)と、受信器(26)の方向に測定信号を集束するための少なくとも1つの受信光学系(32)を有する受信経路(29)と、視差補償のための光学的な近距離領域エレメント(60)とを備えており、該光学的送信経路(28)は第1の光軸(72)を有し、該受信経路(29)は、該第1の光軸(72)から離隔されている第2の光軸(74)を有し、該近距離領域エレメント(60)は、該第2の光軸(74)に対して回転対称的に形成されている。近距離領域エレメント(60)は、前記第2の光軸(74)に対して回転対称的に形成されることを提案する。 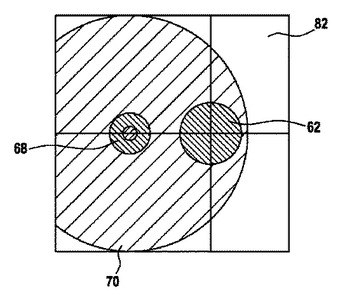 (もっと読む)
(もっと読む)
マルチセンサおよび差分吸収LIDARデータ融合
データ取得の方法は、航空機において複数のセンサを使用する。この方法は、(a)関心対象領域(ROI)上の第1回目飛行パスの間に、関心対象目標を検出するためにDIALセンサを起動するステップであって、ここにおいて、関心対象目標は、ガスまたはオイルのパイプラインからの漏れであるステップと、(b)DIALセンサを使用して関心対象目標を検出するステップと、(c)検出された目標の位置を、ルックアップテーブル(LUT)に格納するステップと、(d)ROI上の第2回目飛行パスの間に、LUTに格納された位置において、またはほぼその位置において、別のセンサを起動するようにトリガーするステップを含む。この方法はまた、(e)両者のオン状態のセンサを使用して、関心対象目標の存在を確認するステップを含む。必要であれば、ROI上の第3回目飛行パスが行われ、LUTに格納された位置において、またはほぼその位置において、更に別のセンサが起動するようにトリガーされる。関心対象目標の存在は、3つすべてのオン状態のセンサを使用して確認される。  (もっと読む)
(もっと読む)
航空機上での乱気流測定ならびに空港および風力発電基地のための方法およびライダーシステム
本発明は、ライダーシステムを使用して、特に航空機上で使用して、乱気流を測定する方法に関し、該方法では予め定めた波長の拡張パルスレーザービーム(12)を空間領域に向けて放射し、その空間領域からの後方散乱光を受信する。レーザーパルス(L)を放射後の第1の時点t1と第2の時点t2において後方散乱光の断面内の強度分布を測定し、両方の強度分布の比較によって、時点t1およびt2で画定される測定フィールド内の乱気流を決定する。スペックルパターン画像はカメラ(21、22)を利用して記録する。評価ユニット(30)は、乱気流を視覚化し、モニター(35)上に表示するために相互相関を実施する。 (もっと読む)
レーザ距離計
【課題】携帯型レーザ距離計の計算機能を拡充して利便性の向上を図る。
【解決手段】携帯型のレーザ距離計に、テンキー及び四則演算のためのキーを備え、これらのキーに距離測定のためのキー機能を割当て、機能切替え操作によってキー機能を距離測定と四則演算とに切替えられるように構成する。例えば、室内幅や外壁面幅を任意の数で割った値を求めたい場合は、室内幅や外壁面幅を測定した後に計算機能に切替えれば除算を行え、表示板に除算結果が表示されるので、手計算したり電卓などを用いて計算したりする手間が省ける。
(もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体
【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
監視装置
【課題】 小型の装置により、鮮明な監視画面を得ることのできる監視装置を提供することを目的とする。
【解決手段】 レーザレーダ制御部2内の画像処理装置25が、ICCDカメラヘッド123から出力された画像信号を所定期間に渡って蓄積し、蓄積した複数の画像信号を重畳して出力することにより、出力レベルの高い信号を出力することが可能となる。これにより、小型で出力レベルの低いレーザ発振器111を用いた場合であっても、鮮明な監視画像を表示装置4に表示させることが可能となる。
(もっと読む)
AF機能を有する光波測距儀
【課題】AF化された光波測距儀の近距離測定における入射光量の低下及びそれに伴う測距精度の低下の問題点をより簡単に解決することを目的とする。
【解決手段】AF機能を有する光波測距儀において、視準望遠鏡の対物レンズ上に設定された異なる一対の瞳範囲を通過した光束により結像された一対の像によりピント位置を検出する位相差方式の焦点検出手段;及びこの焦点検出手段によって検出した焦点状態に基づいて上記視準望遠鏡の焦点調節レンズを合焦位置に駆動する合焦機構;を備えたAF機能を有する光波測距儀において、上記送光反射部材を対物レンズの光軸中心に対して偏心させ、かつ上記位相差方式焦点検出手段の一対の瞳範囲と干渉しない位置に設けた。
(もっと読む)
カメラ
【課題】構造が簡単なカメラを提供すること。
【解決手段】特定の輻射パターンを持つ投射光を被写体に照射するストロボ505、506を有し、ストロボ505、506の被写体反射光を撮像し、撮像した画像の光強度を用いて奥行き画像を得る、形状計測用または被写体抽出用のカメラであって、ストロボ505、506の発光なしの状態にて動画像を撮像し記録メディアに録画できるビデオカメラ533を兼ねており、ストロボ505、506が発光した時に撮像した画像データにインデックス信号を付加しておき、インデックス信号が付加された特定の画像のみを用いて奥行き画像を算出する。
(もっと読む)
監視装置
【課題】 遠方に存在する船舶や障害などの物体を速やかに自動検知し、かつ、検知した物体の画像を表示すること。
【解決手段】 レーダ1により、物体の存在が検知された場合には、送光部21から発せられるレーザ光がその物体に照射されるように、送光部21及び受光部22の仰角及び回転角が制御装置3により動かされる。これにより、送光部21から発せられたレーザ光は、物体に反射され、この反射光が受光部22により撮像される。そして、受光部22により取得された画像が、レーザレーダ制御部24の画像処理装置により処理され、処理後の画像信号が制御装置3を介して表示装置4に供給される。これにより、表示装置4に受光部22により取得された画像が表示されることにより、その物体の形状などを確認することが可能となる。
(もっと読む)
光電スイッチ
【課題】小型化を図りつつ受光信号の処理に関する値を容易かつ正確に認識することができる光電スイッチを提供することである。
【解決手段】 ケーシング10の前面部14には、検出領域に光を投射するとともに検出領域からの帰還光を受ける投受光部20が設けられている。ケーシング10の背面部13には、表示部30および2つのプッシュ式の調整スイッチ50が設けられている。ケーシング10内において回路基板100の背面側に回路基板101,102が配置され、回路基板101,102は回路基板100に対して垂直に取り付けられている。表示部30はケーシング10に一体的に形成された透明の窓部35を有し、窓部35に対向するように回路基板100が配置される。回路基板100上には複数のLED31が取り付けられ、LED31上に7セグメントカバー32が配置される。
(もっと読む)
建築限界支障物検出装置
【課題】
鉄道建築限界内の支障物を車輌の走行状態において簡単に検出することができる建築限界支障物検出装置を提供することにある。
【解決手段】
この発明は、車輌に固定され所定の長さのコーン型の投光光を車輌の前方または後方に投光する投光装置と、車輌に固定され投光光の反射光を所定の視野で受光するカメラと、視野の内側に設定された鉄道建築限界を示す範囲枠あるいはその範囲枠情報とを備えていて、視野において範囲枠あるいは範囲枠情報の内側(境界線上も含む,以下同じ)に所定値以上のレベルの反射光がカメラにより撮影されたときに支障物として検出するものである。鉄道建築限界内の支障物を走行状態において即座にかつ簡単に検出することができる建築限界支障物検出装置を提供することにある。
(もっと読む)
自動車の内外シーン3次元検出に用いられる自動車用装置
自動車の内及び/又は外シーン(4)を空間的に検出する自動車内装置であって、電子式検出装置(9)に連結されたLIDARセンサ(1)と、画像処理装置(11)に接続され、シーンの画像を記録・評価する画像センサ(12)を有する。シーン(4)の空間データを判別するため、検出装置(9)と画像処理装置(11)はコンピュータ(10)に連結される。  (もっと読む)
(もっと読む)
風速測定システムおよび風速測定方法
【課題】 ドップラーシフトにより変化したレーザ光の周波数を簡易に導くことを実現して、測定箇所における風速や風向を容易かつ簡単に測定可能な風速測定システムを提供すること。
【解決手段】 出射レーザ光L1を出射するレーザ光生成器11と、出射レーザ光L1の戻レーザ光L2を分光するハーフミラー24と、ハーフミラーを透過する第1分光戻レーザ光L21の光強度を測定する第1光強度測定器27と、ハーフミラーにより反射された第2分光戻レーザ光L22をその周波数に応じて減衰させる光フィルタ26と、光フィルタにより減衰された第2分光戻レーザ光L22の光強度を測定する第2光強度測定器28と、光フィルタによる光強度の減衰量から戻レーザ光の周波数を算出して出射レーザ光の周波数と共に代入することにより測定箇所における風速・風向を算出する制御部と、を備える。
(もっと読む)
風速・風向測定システム
【課題】 測定範囲内における風速・風向を、効率よく、容易かつ簡単に測定することができる風速・風向測定システムを提供すること。
【解決手段】 レーザ光を測定箇所に出射する出射部と、その測定箇所で散乱された戻レーザ光を受光する受光部と、この出射部と受光部を駆動制御する制御部30と、を備えて、その制御部のCPU31は、測定箇所を細かく変動させて近傍3箇所における風速測定を行うことにより、その測定箇所における風速・風向を測定するとともに、その測定箇所を3次元的に変化させる。
(もっと読む)
101 - 120 / 124
[ Back to top ]