
Fターム[5J084CA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | サンプリング、A/D変換、D/A変換 (231)
Fターム[5J084CA49]に分類される特許
101 - 120 / 231
レーダ装置
【課題】従来の測距処理は処理対象となる受信信号での包絡線算出にフーリエ変換を行う場合、逆フーリエ変換も行う必要が生じ、演算量が多い。
【解決手段】空間に放射され、空間の物体で反射した波動を受信し、放射から受信までの時間で物体の距離を計測するレーダ装置であり、受信手段が受信信号に周波数変換して生成した中間周波受信信号から、中間周波信号最大値検出手段がその最大値を検出し、中間周波信号抽出手段でこの最大値の時刻を含む所定時間区間で抽出した中間周波信号から、2信号抽出手段が予め設定された時間間隔だけ離れた2つの中間周波受信信号値を抽出し、包絡線算出手段が、2信号抽出手段で抽出された2つの受信信号値から中間周波受信信号の包絡線を算出する。
(もっと読む)
光波距離計

【課題】位相差方式の光波距離計において、部品や配線をシールドしたり、部品と配線に特別な工夫することなく、測距光の変調周波数のノイズによる誤差を小さくする。
【解決手段】測距光(L)を測点に置かれたターゲット(22)に向けて出射する光源(20)と、ターゲットで反射して戻ってきた測距光を受光して測距信号(M)に変換する受光素子(28)と、受光素子へ入射する測距光を減衰又は遮断する絞り(27)と、測距信号の初期位相βからターゲットまでの距離を算出する演算制御部(44)とを備える光波距離計において、距離測定前に、絞りを最も光を減衰させる状態にして、光源を発光させるとともに、受光素子の増倍率を適正値にしてノイズ測定を行い、このときのノイズの1波あたりの振幅aと初期位相ηとを測定し、振幅aと初期位相ηを用いて初期位相βをノイズによる誤差を除去した初期位相β”に補正し、初期位相β”からターゲットまでの距離を算出する。
(もっと読む)
速度計
【課題】
高精度な処理を容易に実現する速度計を提供する。
【解決手段】
本発明は、レーザー光源1から移動物体7に入射した光束の散乱光を異なる方向から検出する複数の光検出器12a、12bを備えた速度計であって、光検出器12a、12bの検出信号S1、S2をデジタル化するアナログ/デジタル変換手段と、移動物体7の速度を算出する速度演算手段24aと、検出信号S1、S2の振幅を算出する振幅演算手段24bと、検出信号S1、S2のドロップアウトを検出するドロップアウト検出手段24dと、ドロップアウトの検出時刻を保持する時刻保持手段24eと、信号切替時刻を算出する切替時刻演算手段24fと、複数の速度、振幅、及び、信号切替時刻を記憶する記憶メモリ25と、複数の振幅及び信号切替時刻に基づいて、記憶メモリ25に記憶された速度のうちの一つを選択して出力する出力選択手段26とを有する。
(もっと読む)
対象物測距装置及びプログラム
【課題】検出した対象物までの距離を精度良く算出することができる対象物測距装置及びプログラムを提供する。
【解決手段】投光パターン検出部22は、画像上の投光パターン34を検出し、歩行者検出部20は、画像上の歩行者を検出し、投光器制御部24は、歩行者32の画像上の位置座標、及び投光パターン34の画像上の投光位置座標を算出し、2点の偏差が所定値以下となるような投光器14の投光角度を算出し、算出した投光角度で投光されるよう投光器14を制御し、2点の偏差が所定値以下となった場合には、撮像装置12と投光器14との距離、投光位置のX座標、及び投光器14の水平方向の投光角度に基づいて、歩行者32までの距離を算出する。
(もっと読む)
光学式変位計
【課題】
1次元イメージセンサに2つの出力を設けた時に発生する増幅回路のオフセット量及びゲインの個体ばらつきの影響を低減した光学式変位計を提供することを目的とする。
【解決手段】
1次元イメージセンサ20の奇数画素20aと偶数画素20bの受光量を異なる出力ポートから個別に読み出して、異なる増幅回路15a、15bによって独立して増幅する。増幅された奇数画素20a、偶数画素20bの2つの受光量から形成された2つの受光量分布から、各々受光量のピークとなる画素位置を算出する。算出された2つの画素位置に基づいて、測定対象物までの距離を算出する。。
(もっと読む)
測距装置
【課題】背景光による測定誤差の少ない少数ロットのシステムを安価に組み立てられる測距装置を提供する。
【解決手段】発光ダイオード11から出力した検知光を測定対象A1に向かって射出し、検知光の反射光をレンズ13で収束してリニアセンサ14の検知面14aに収束スポットSPを形成させる。演算素子15は、リニアセンサ14からシリアルデータで出力される102個の受光素子18のそれぞれの受光量の数値データを用いて収束スポットSPの受光量ピークを識別して、測定対象A1までの距離を演算し、演算結果を出力端子OUT1〜OUT4を通じて4ビットのパラレルデータで出力する。
(もっと読む)
裏面照射型撮像素子及び距離測定装置
【課題】距離算出時間を短縮することが可能な裏面照射型撮像素子を提供
【解決手段】一定周期で強度変調された照射光による対象物8からの反射光をp基板24の裏面側から受光し、反射光に応じてp基板24内の複数の光電変換部で発生して蓄積された電荷をp基板24の表面側から読み出して撮像を行う裏面照射型撮像素子であって、1つの光電変換部に対応して4つ設けられ、対応する光電変換部で発生して蓄積された電荷を一時的に蓄積するための電荷蓄積部15a〜15dと、p基板24の表面上方に設けられ、1つの光電変換部に対応する電荷蓄積部15a〜15dの各々に、該光電変換部に蓄積される電荷のうち反射光の該各々に対応する位相における光に応じた電荷を蓄積させる制御を行う電極20と、p基板24の表面上方に設けられ裏面照射型撮像素子が形成されたチップとは別のチップと電荷蓄積部15a〜15dとを接続するためのチップ間接続用電極21とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】三角波頂点の過渡応答の影響を軽減する。
【解決手段】物理量センサは、半導体レーザ1と、三角波の極大部と極小部とを丸めた波形の駆動電流を半導体レーザ1に供給するレーザドライバ4と、半導体レーザ1から放射されたレーザ光と測定対象10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段(フォトダイオード2、電流−電圧変換増幅器5)と、干渉波形の情報から、測定対象の物理量を計測する計測手段(フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
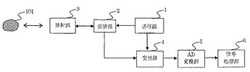
検出及び測距方法及びシステム
検出された光の光学信号を取得し、蓄積されたデジタル・トレースを生成するためのシステム及び方法が提供される。この方法は、視野の照明のための光源と、光検出器と、アナログ・デジタル変換器(ADC)とを設け、視野内に光源から1つのパルスを放出し、光検出器によりパルスの反射信号を検出し、ADCにより検出された反射信号のj点を取得し、バッファ内にj点のデジタル信号波形を格納し、2π/Pの位相シフトを導入し、バッファ内に、放出し、検出し、取得し、格納し、導入するステップをP回繰り返して、P×j点のインターリーブされた波形を格納し、Nが放出されたパルスの総数であるものとして、合計N=M×P個の取得セットについてのインターリーブされたP×j点のM個のトレースを蓄積し、M個のトレースの各点を加算することにより、j×P点の反射信号の1つの結合されたトレースを生成するステップを含む。さらに、結合されたトレースをパルスの検出された基準反射信号と比較して、パルスが移動した距離を求めることができる。 (もっと読む)
人体検知センサ
【課題】誤検出を防止して検知エリア内の人を確実に検出できるようにした人体検知センサを提供する。
【解決手段】人体検知センサ1は、対象空間に強度が周期的に変化する強度変調光を照射する発光源5、および、受光光量に応じた電気出力を発生する複数個の感光部が配列されて対象空間を撮像する光検出素子3を具備し、画素値が距離値である距離画像を生成する距離画像センサ部2と、距離画像センサ部2の距離画像をもとに検知エリアにおける人の存否を検出する信号処理回路10とを備える。信号処理回路10は、水平面内を距離画像センサ部2の設置位置を中心とする同心円状の境界で複数のエリアに分割し、各々のエリア毎に各エリアに対応する画素の画素値の上限値を、設置位置から遠いエリアほど上限値が大きくなるように段階的に設定することで、略一定の高さまでの範囲を検知エリアから外している。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良く測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、次いで、第2の測距光を発光し、第2の測距光の変調周期における複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良くかつ高速に測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、複数の第1の受光信号に基づいて、第1の測距光と第1の測距光の反射光との位相差を算出し、位相差に基づいて第2の測距光の位相を第1の測距光とは異なるように変更して第2の測距光を発光する。第2の測距光の変調周期における位相差に応じた複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】背景光の周波数が変化しても、被検物までの距離を正確に計測できる距離計測装置を提供する。
【解決手段】所定周波数で変調された光を照射する投光装置1と、照射された光の反射光を撮像する撮像装置2と、撮像装置2で得られた撮像信号の同期検波を行う同期検波処理部32と、同期検波によって得られた信号に基づいて被検物までの距離情報を求める距離算出部33と、撮像装置2で得られる撮像信号に基づいて、この撮像信号に含まれる周波数成分と識別可能な照射光の周波数を求める照射周波数算出部34と、その照射光の周波数によって投光装置1の所定周波数を変更する駆動制御部31とを備える。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】高いフレームレートにて距離画像を生成できるようにする。
【解決手段】測距光照射部3が所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が測距光の反射光を受光し受光光量に応じた信号を出力する。この際測距光の変調周期における互いに異なる複数の位相の数に対応する数の受光素子からなる受光素子単位を設定し、第1の基準変調周期において受光素子単位に含まれる受光素子により複数の位相の反射光を受光し、複数の位相数に対応する数の第1の基準変調周期からなる第2の基準変調周期において、各受光素子により受光される反射光の位相を順次切り替えて、各受光素子により複数の位相のすべての反射光を受光して、複数の位相のすべての受光信号を取得する。第1の距離画像生成部31が受光素子単位毎に第1の距離画像S1を生成し、第2の距離画像生成部32が受光素子毎に第2の距離画像S2を生成する。
(もっと読む)
測距方法および装置ならびにこれに用いられる撮像素子
【課題】変調光位相差方式により距離を測定する際の時間の短縮を図る。
【解決手段】一定の周期Tで光強度を変調させた変調光L1が射出されたとき、射出した変調光L1が被写体に照射されたときの被写体からの反射変調光L2を受光する。このとき、第1検出信号αを取得する第1受光素子30aと、第2検出信号βを取得する第2受光素子30cと、第3検出信号γを取得する第3受光素子30cと、第4検出信号δを取得する第4受光素子30dとから構成されるブロックが格子状に複数配列された受光部を用いて4種類の検出信号α〜δを取得する。そして、隣接した4種類の受光素子30a〜30dから取得される4種類の検出信号α〜δを用いて位相差Δφを検出し被写体までの距離dを算出する。
(もっと読む)
測距方法および装置
【課題】変調光位相差方式により距離を測定する際の誤測距を防止する。
【解決手段】発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。被写体Sから反射した反射変調光L2が受光ユニット20において受光され、第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定され、差分ΔWが設定値Aより小さいとき、4種類の各検出信号α〜γを用いて変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて被写体までの距離dが算出される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、位相差Δφの検出が行われず距離演算は行われない。
(もっと読む)
光学式測距センサおよびそれを備えた機器
【課題】測距センサの投光ビームの周辺光に起因して非測距対象物を誤測距または誤検知することを回避できる三角測距方式の光学式測距センサを提供する。
【解決手段】この光学式測距センサは、受光素子12の受光面12aの検知領域U1に形成されている光学フィルタ22が、所定の測距距離を上回る距離だけ離れた非測距対象物18で投光ビームの周辺光が反射した反射光が受光レンズ14を経由して受光素子12の受光面12aに入射する入射光の光量を低減させる。これにより、測距センサの投光ビームの周辺光に起因して非測距対象物18を誤測距または誤検知することを防止できる。
(もっと読む)
能動的オブジェクト検出システムにおけるクラッタ除去
本願明細書において教示される方法および装置によれば、能動的オブジェクト検出システムは、都合よくクラッタを除去すると共に、光パルス放射および対応物および飛行時間ベースの距離決定により信頼性の高いオブジェクト検出を実行する。制限されるものではないが、本願明細書で教示される方法および装置は、特にセーフティ・クリティカルなオブジェクト検出アプリケーション、例えば、所定のた監視半径または輪郭内の少なくとも指定されたサイズのオブジェクトを監視する能動的オブジェクト検出システム(例えばレーザスキャナ)、に有利である。  (もっと読む)
(もっと読む)
測距方法および装置
【課題】変調光位相差方式により距離を測定する際の時間の短縮を図る。
【解決手段】一定の周期Tで光強度を変調させた変調光L1が射出されたとき、射出した変調光L1が被写体に照射されたときの被写体からの反射変調光L2を変調光の1/2周期分受光することによりすると、第1検出信号αと、第1検出信号αよりも位相がπ/2進んだ第2検出信号βと、第2検出信号βよりも位相がπ/2進んだ第3検出信号γとが取得される。そして、第1検出信号αと第2検出信号βと第3検出信号γとを用いて変調光L1と反射変調光L2との位相差がΔφが検出され、位相差Δφから被写体距離dを算出する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】半導体レーザの波長変化の制御を容易にし、三角波頂点の過渡応答の影響を軽減する。
【解決手段】物理量センサは、半導体レーザ1と、少なくとも発振波長が連続的に単調増加する第1の発振期間と発振波長が連続的に単調減少する第2の発振期間と第1の発振期間から第2の発振期間への間で発振波長が最大値で一定の第3の発振期間と第2の発振期間から第1の発振期間への間で発振波長が最小値で一定の第4の発振期間とが繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、フォトダイオード2の出力に含まれる、レーザ光と戻り光との自己結合効果によって生じる干渉の情報から、測定対象の物理量を計測する計測手段(電流−電圧変換増幅器5、フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
101 - 120 / 231
[ Back to top ]