
Fターム[5J084CA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | サンプリング、A/D変換、D/A変換 (231)
Fターム[5J084CA49]に分類される特許
121 - 140 / 231
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】TOF方式により測距を行うための撮像手段と、ステレオマッチングにより測距を行う撮像手段を備えた立体撮像装置において、被写体への測距光の照射を制限できるようにする。
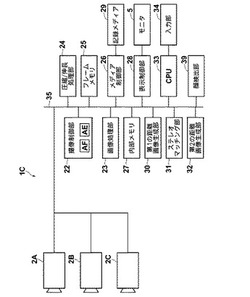
【解決手段】第1の距離画像生成部30において、第1の撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。第2および第3の撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、第1の撮像部2Aによる撮像前に第2および第3の撮像部2B,2Cにより撮像を行い、顔検出部39がこれにより取得した画像から顔等の所定被写体を検出する。所定被写体が検出された場合には、第2および第3の撮像部にのみ撮像を行わせ、第2の距離画像生成部32にのみ距離画像D2を生成させる。
(もっと読む)
固体撮像装置及び距離画像測定装置

【課題】 簡易な構成で距離画像測定が可能な固体撮像装置及び距離画像測定装置を提供する。
【解決手段】 一対の第1ゲート電極IGR,IGLが、光感応領域SAと一対の第1蓄積領域AR,ALとの間のポテンシャルφTX1,φTX2が交互に傾斜するよう半導体基板100上に設けられている。一対の第2ゲート電極IGR,IGLは、第1蓄積領域AR,ALと第2蓄積領域FDR,FDLとの間にそれぞれ介在する第1ポテンシャル障壁φBGの高さを制御するよう半導体基板100上に設けられており、光検出素子によって検出される背景光の出力が高いほどキャリアに対する第1ポテンシャル障壁φBGの高さを増加させる。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングによる距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから第1の距離画像D1を生成する。撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が第2の距離画像D2を生成する。画素値変更部40が、第1の距離画像D1および第2の距離画像における対応する画素の画素値の差分値を算出し、差分値がしきい値を超える第2の距離画像D2における画素を誤対応画素として検出し、誤対応画素の画素値を所定の画素値に変更する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングにより距離画像を生成する際に、立体撮像装置から被写体までの距離が大きくても、距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。基線長変更手段38が、第1の距離画像に基づいて被写体までの距離である被写体距離を算出し、被写体距離が大きいほど撮像部2B,2C間の距離である基線長を大きくするよう変更する。基線長の変更後、撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。
(もっと読む)
光学式変位計
【課題】 ラインセンサからの受光量の出力時間を短縮化させ、応答性を向上させた光学式変位計を提供することを目的とする。
【解決手段】 同一の半導体基板上に奇数素子20a及び偶数素子20bが交互に配置されたラインセンサ20と、奇数素子20aの受光量が入力され、当該受光量を順に出力する第1シリアル出力部21aと、偶数素子20bの受光量が入力され、当該受光量を順に出力する第2シリアル出力部20bとを備え、奇数素子20a及び偶数素子20bのいずれか一方から出力される同時に露光して求められた受光量に基づいて、上記ラインセンサの投受光条件を求めるフィードバック制御を繰り返し、受光量調整のための時間を短縮化させる。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両
【課題】計測対象空間内の被検物の距離情報、例えばその被検物が計測装置からある特定の距離だけ離れているかどうかを高速に計測する。
【解決手段】投光器1L,1Rは、計測対象空間内に照射光L11〜L13およびL21〜L23を交差するように、かつそれらの交点からの反射光のパルス間隔が交点までの距離に対応する時間間隔となるようにパルス光を投光する。撮像素子2は、計測対象空間内の被検物からの反射光を検出してその被検物の像を複数回撮像する。同期検波部33Aは、複数枚の画像における各画素から出力される時系列画素信号の中から、計測対象である交点までの距離に対応するパルス間隔を持つ時系列画素信号を検出する。
(もっと読む)
駆動回路
【課題】負荷のリアクタンス成分の変動によって負荷を駆動するための出力の立上り時間が変動した場合であっても負荷の動作が変動するのを抑制する。
【解決手段】負荷Aの容量値が変動した場合、駆動回路1の傾き調整回路6は、電流制御回路50,51のpMOS52及びnMOS53に印加するゲート電圧を調整し、pMOS52及びnMOS53の各ソース−ドレイン間に流れる電流を調整する。つまり、出力ドライバ4のCMOS回路40を構成するpMOS41及びnMOS42のそれぞれのオン時にpMOS41及びnMOS42の各ソース−ドレイン間に流れる電流を調整する。これにより、出力ドライバ4と負荷Aとの間に流れる電流を制御し、負荷Aの容量成分を充放電させる時間を制御するため、負荷Aの駆動電圧の立上り及び立下りの傾きを補正し、上記駆動電圧の立上り時間及び立下り時間を一定時間にする。
(もっと読む)
赤外線ユーザーセンサを有する流体分与器
【課題】物体が目標区域に入った時に、ユーザーに自動的に分配するために光検出器と関連するコントローラを利用する分配システム。
【解決手段】コントローラ26は、光検出器22に近接して取り付けられた光源24をパルスさせるようにプログラムされている。コントローラは、光検出器の受信信号で電圧を常時モニターし、オンオフでパルスされる光から電圧の差を評価する。コントローラは差を合計し、平均差の値を生起するために指定の期間にわたって差を常時更新する。平均差の値は目標オフセット値と合計され、瞬間電圧差と比較される。瞬間差が目標オフセット値及び平均差の和を超える場合、コントローラは、物体上に流体又は他の製品を分配する分配機構に信号を送る。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】隠れ点を考慮して簡易に精度良くマッピング画像を取得できるようにする。
【解決手段】同期制御部20により距離画像を取得するための撮像部2Aおよび撮像部2Bの駆動を同期させて距離画像および2次元画像を取得する。対応関係算出部30により、距離画像上における画素と、2次元画像上における画素との対応関係を算出する。この際、隠れ点検出部31において、撮像部2Aからは臨むことができるが撮像部2Bからは臨むことができない被写体上の隠れ点を距離画像および2次元画像上において検出する。マッピング部32により、対応関係に基づいて、隠れ点を視認可能に2次元画像を距離画像にマッピングしてマッピング画像を生成する。
(もっと読む)
パルス反射混合法を用いた手持ち式レーザ距離測定器
【課題】パルス反射混合法において測定時間をより的確に利用することにより、手持ち式レーザ距離測定器の感度ひいては測定範囲を向上させる。
【解決手段】制御手段2によって制御可能な少なくとも1つの遅延回路9a,9bが設けられており、該遅延回路9a,9bが、局所発振器8と、光検出器10および/または送光器12との間に配置されており、測定パルス4および基準パルス6を走査するために、走査パルス11と送信パルス7との間に遅延を発生させる。
(もっと読む)
撮像装置、立体画像再生装置及び立体画像再生プログラム
【課題】撮影後に多視点画像を立体表示する場合においても、編集を容易に行うことができる多視点画像を撮影することができる。
【解決手段】複数の撮像手段により多視点画像を撮影し、多視点画像を立体表示するときの基準となる面である基準面の距離を取得し、全撮影範囲内の被写体の距離を所定の画素単位で測距してなる距離画像を取得し、多視点画像と、基準面の距離を示す情報と、距離画像とを関連付けて記録する。これにより、撮影された被写体像内の基準面上の領域を識別する表示をすることができる。なお、撮影、記録後に、基準面を示す情報と距離画像とに基づいて、多視点画像内の基準面上にある被写体の領域を抽出し、抽出した領域にマーキングデータを合成することで、変更後の基準面の領域を識別可能に表示しながら、基準面の距離を変更することもできる。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】レーザ光の走査領域を予め設定された矩形形状とすることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】ミラー13によってレーザ光を走査領域において走査させる。ミラー13の回動に伴って回動する光学素子(ミラー15)によってサーボ光を光検出器(PSD106)の受光面上において走査させる。ミラー13は、レーザ光の走査領域が矩形形状となるよう、第1の方向および第2の方向に回動制御される。光検出器は、このようにミラーを回動制御したときの受光面上におけるサーボ光の走査領域の歪が抑制される方向に傾斜して配置される。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】レーザ光の走査領域を予め設定された矩形形状とすることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】レーザ光源(半導体レーザ101)と、レーザ光源から出射されたレーザ光が入射されるミラー13と、ミラー13を第1の回動軸と当該第1の回動軸に垂直な第2の回動軸をもってそれぞれ第1および第2の方向に回動させる駆動機構(ミラーアクチュエータ100)とを備える。ここで、ミラー13の反射面は、第2の方向における回動位置を任意の位置に固定した状態で第1の方向にミラー13を回動させてレーザ光を走査させる場合に、レーザ光の走査領域が矩形形状となるよう構成されている。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】レーザ光の走査領域を予め設定された矩形形状とすることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】レーザ光源(半導体レーザ101)と、レーザ光源から出射されたレーザ光が入射されるミラー13と、ミラー13を第1の回動軸と当該第1の回動軸に垂直な第2の回動軸をもってそれぞれ第1および第2の方向に回動させる駆動機構(ミラーアクチュエータ100)と、駆動機構を制御してレーザ光を2次元方向に走査させる制御回路(DSP制御回路201、等)を備える。制御回路は、レーザ光の走査領域が矩形形状となるよう、ミラーを第1の方向および第2の方向に回動制御する。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】小型かつ簡素な構成にてビーム走査を容易に制御でき、さらに、レーザ光の走査位置を安全かつ簡易な処理にて検出可能なビーム照射装置およびレーザレーダを提供する。
【解決手段】第1の波長のレーザ光を出射する第1の光源(半導体レーザ101)と、第1の光源から出射されたレーザ光を反射する曲面ミラー200と、弾性体(サスペンションワイヤ202)を介して曲面ミラーを変位可能に支持するとともに曲面ミラーを駆動してレーザ光を走査させるミラーアクチュエータ106と、第1の光源とは別に配された第2の光源(半導体レーザ102)と、第2の光源から出射され曲面ミラーを経由した光を受光するとともに当該光の受光位置に応じた信号を出力する光検出器(PSD108)を有する。
(もっと読む)
携帯型測距装置
【課題】 測定対象物までの距離とともに被測定面の傾斜を広範囲に亘って判定すること。
【解決手段】 対物レンズ18を介して測定対象物に向けて測距光を出射し、その反射光を対物レンズ20を介して受光素子22で受光し、測距光と反射光間の位相差を基に測定対象物までの距離を演算部24で演算し、筐体38にも受けた基準面42の当接する被測定面の傾斜を0〜360°の範囲で傾斜計14で測定し、この測定値を演算部24に出力する。
(もっと読む)
光学的測離計
【課題】少ない較正工数の正確な測量を可能とする。
【解決手段】光学的距離計は、監視空間に測定光を送出する発光部、監視空間にある対象物により反射又は再発射された測定光を受光する受光部2、その出力信号から測定光の通過時間を決定しそれから対象物の距離を算出する評価ユニットを備えている。受光部2と評価回路との間には、これらと電気的に接続されているPINダイオード回路200,300が設けられており、PINダイオード回路200,300が受光部2の電流出力信号を減衰する。
(もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】第1測距装置10Aは、強度変調され、且つ、開始位相がそれぞれ異なる第1変調光12A〜第4変調光12Dをシリーズに出射する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。発光手段14は、発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28とを有し、さらに、発光制御部28は、第1変調光12A〜第4変調光12Dの各開始位相を制御する開始位相制御部64を有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
測距装置及び測距方法
【課題】被検出物までの距離が遠い場合等において、専用のキャリブレーションを行うことなく、被検出物までの距離を正確に測定できるようにする。
【解決手段】第1測距装置10Aは、複数の発光開始タイミングにおいてそれぞれ強度変調された変調光12を出射する発光手段14と、変調光12により照射された被検出物16からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有し、受光手段20は、発光開始タイミングの回数と変調光12の波長に基づいて発光開始タイミングから反射光18の受光開始時点までの時間的長さをそれぞれ変化させるタイミング制御部68を有する。
(もっと読む)
測距装置及び測距方法
【課題】変調光の出射から変調光の1周期以上遅延して反射光(遅延反射光)が到達しても正確に距離に測定できるようにして、距離測定の高精度化を図る。
【解決手段】第1測距装置は、強度変調された変調光12を出射する発光手段14と、変調光12により照射された被検出物16からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物16までの距離を算出する演算手段22と、ゲート制御部80とを有する。ゲート制御部80は、ゲートパルスを出力して、被検出物16に対して変調光12を間欠に照射するように発光制御部26を制御し、変調光12の間欠照射に基づいて、被検出物16からの反射光18の受光を間欠に制御するように電気光学シャッタあるいは撮像素子28の電子シャッタを制御する。
(もっと読む)
121 - 140 / 231
[ Back to top ]