
Fターム[5J084CA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | サンプリング、A/D変換、D/A変換 (231)
Fターム[5J084CA49]に分類される特許
61 - 80 / 231
画像撮像装置
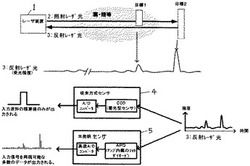
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
光波距離計

【課題】位相差方式の光波距離計による遠距離測定の際に、測距光の空気中の微粒子による反射による影響を少なくする。
【解決手段】複数の変調周波数(F1、F2、F3)で変調された光を出射する発光素子(11)と、該発光素子から出射された光を受光する受光素子(30)と、該受光素子に接続される複数の周波数変換器(32,35,38)と、前記発光素子から出射された光を目標反射物までを往復して前記受光素子に入射する測距光路または光波距離計内部の参照光路を経て前記受光素子に入射する参照光路に切換えるシャッター(28)とを備えた光波距離計において、複数の周波数変換器にはそれぞれ異なる周波数の局部発振信号が加えられ、最も低い周波数(F2−F3+ΔF3)の局部発振信号が、2番目に低い変調周波数(F2)と最も低い変調周波数(F3)の差(F2−F3)といくらか異なる周波数とされる。
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ポインティングリファレンスを簡単な構成で走査範囲内に設置する。
【解決手段】レーザビームを第1及び第2のミラーで2次元に走査するレーザ測距装置において、前記レーザビームの送信側の前記第2のミラーは前記レーザビームを部分的に透過するミラーであり、前記第2のミラーを透過したリファレンス用レーザビームを当該第2のミラーに反射する第3のミラーと、前記第3のミラーで反射され、前記第2のミラーの裏面で反射された前記リファレンス用レーザビームを集光する集光光学系と、前記集光光学系で集光された前記リファレンス用レーザビームを検出する2次元アレイ状の検出器と、を更に備え、前記第1のミラー及び前記第2のミラーの角度情報と前記検出器の検出信号とに基づいて規定値からの変位量を計算し、前記変位量に基づいて前記第1のミラー及び前記第2のミラーの角度を校正する。
(もっと読む)
測距装置
【課題】不要なポインタ光の送光を止める測距装置を得る。
【解決手段】測距装置は、対象物に向けて測距用の光を送光する第1送光手段4と、測距開始操作信号に応じて、測距用の光が対象物との間を往復する時間に基づいて対象物までの距離を測る測距手段1,2と、対象物に向けて測距用の光と異なるポインタ光を送光する第2送光手段4と、第1送光手段4、第2送光手段4および測距手段1,2をそれぞれ制御する制御手段1とを備え、制御手段1は、第2送光手段4からポインタ光が送光されている状態で測距開始信号を受けると、ポインタ光の送光を停止させてから距離測定を開始させる。
(もっと読む)
測距装置
【課題】S/N比が悪くても予備測定を適切に行う測距装置を提供すること。
【解決手段】測距装置は、対象物に向けて光を送光する送光手段4と、対象物で反射された光を受光する受光手段5と、送光から受光までの時間に基づいて対象物までの距離を演算する演算手段1,2と、本測定の前に予備測定を行い、該予備測定値を用いて本測定を行うように送光手段4、受光手段5および演算手段1,2をそれぞれ制御する制御手段1とを備える。そして、予備測定時の制御手段1は、演算手段1,2によって距離演算値を所定回数だけ演算するように送光、受光および演算を繰返し制御し、所定回数だけ演算して得た複数の距離演算値に基づいてヒストグラムを求め、ヒストグラムの度数のうち最大度数が第1判定閾値P1以上の場合は、最大度数の階級に含まれる距離演算値を用いて予備測定値を得る。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
レーザ測距装置
【課題】パルスのレーザ光を送信して目標物で反射したレーザ光を受信し、送信から受信までの経過時間から目標物までの距離を算出するレーザ測距装置において、より効率的な測距処理を可能にしたレーザ測距装置を提供する。
【解決手段】パルス毎に受信信号の最大ピーク値と送信から最大ピーク値に達するまでの時間をサンプリング周期の周期数として測定し、複数回の受信信号の最大ピーク値をそれぞれカウントした周期数が同じ数同士で積分し、最大の積算値が存在する周期数を導出し、この導出した周期数に相当する時間から目標物までの距離を演算する。最大ピーク値及び周期数の測定には高速に応答可能なアナログ回路を用いる。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
光学式変位計
【課題】正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】時点t21,t22,t23において、X方向における光の走査位置が位置P12に一致し、時点t21a〜t21bの期間、時点t22a〜t22bの期間、時点t23a〜t23bの期間に露光が行われる。この場合、露光の開始時点と終了時点との中間の時点で、投光方向が所定の方向と一致する。すなわち、時点t21a〜t21の期間の長さと時点t21〜t21bの期間の長さとが等しく調整され、時点t22a〜t22の期間の長さと時点t22〜t22bの期間の長さとが等しく調整され、時点t23a〜t23の期間の長さと時点t23〜t23bの期間の長さとが等しく調整される。
(もっと読む)
距離測定装置
【課題】レーザ装置の共振器長を固定化する手段や、周波数を安定化する手段を設けずに、周波数が変化する2以上の周期信号の位相差から距離を測定する。
【解決手段】距離測定装置は、レーザ光束として光周波数コムを発生するレーザ装置1と、レーザ光束を基準光と測距光に分割する分割手段2と、基準光を受光する基準受光部3と、測距光を受光する測定受光部6とを備える。測定受光部6の受光信号は、第1フィルタ14で測距用の周波数成分が抜き出され、基準受光部3の受光信号は、第2フィルタ11で基準用の周波数成分が抜き出される。サンプリング部18は、第1フィルタ14および第2フィルタ11からの処理信号を非同期のサンプリング周波数でサンプリングする。位相差測定部23は、そのサンプル結果から処理信号の実際の周波数を演算し、2つの処理信号の位相差を測定する。距離測定部17は、位相差から距離を測定する。
(もっと読む)
距離画像センサシステムおよび距離画像生成方法
【課題】簡易な構成でかつ正確に距離画像を生成する距離画像センサシステムおよび距離画像生成方法を提供する。
【解決手段】被写体までの距離を画素ごとに測定した距離画像を生成する距離画像センサシステムである。距離画像センサシステムは、複数の光源、発光制御手段、距離画像生成手段、および距離画像選択手段を備える。複数の光源は、それぞれ離間して配置されて発光する。発光制御手段は、複数の光源を順に切換えて発光させる。距離画像生成手段は、複数の光源それぞれの発光に対応して画像の撮像を行い、各画素が撮像された被写体までの距離に応じた画素値を有する距離画像を、複数の光源それぞれに対応して複数生成する。距離画像選択手段は、距離画像センサシステム複数の距離画像のうち、画像の撮像において受光量が最も多い画像を用いて生成された距離画像を選択する。
(もっと読む)
光スポット位置検出装置およびそれを含む光デバイス、並びに、その光デバイスを含む電子機器
【課題】メモリ部のビット数を増大させることなく近距離から遠距離までの入射光の光スポットの位置を検出できる。
【解決手段】メモリ部25における記憶部の画素データが飽和した場合には、以後のフレームにおいて、発光素子11の発光停止と、固体撮像素子17の露光停止と、メモリ部25への画素データの転送停止とのうち、少なくとも何れか一つを行うようにしている。したがって、画素データが飽和したことによる受光強度分布形状の崩れを1つのフレーム分の最小限に止め、メモリ部25において画素データが飽和した場合でも受光強度分布形状に基づく光スポット位置の演算が可能になる。その結果、メモリ部25のビット数を増大させることなく、近距離から遠距離までの入射光の光スポット位置を検出できる。また、メモリ部25に対する画素データの不要な積算を行わないので、メモリ部25における1画素当たりのビット数の増大を防止することができる。
(もっと読む)
レーザードップラー速度計
【課題】被検体の速度を安定して精度良く測定するレーザードップラー速度計を提供する。
【解決手段】レーザードップラー速度計100は、被検体Dの表面で干渉及び反射された散乱光を受光する複数の受光素子120を含む光学センサ110と信号処理ユニット130とを有し、信号処理ユニット130は、複数の受光素子120の出力のうち信号レベルが許容値以上であるかどうかを判断することによってその一つ選択するための選択信号を生成するCPU138と、選択信号に基づいて信号S1を信号S2に切り替える選択切換部146と、信号S1と信号S2の位相差に対応する時間差だけ信号S2の立ち上がり及び立ち下がりを遅延させて信号S1と重ねることによってパルス信号を生成する差分遅延処理部148と、を有する。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
ドップラーレーダ用受信回路及びドップラーレーダ装置
【課題】VCOとミキサーを用いずに、風速を計測できるドップラーレーダ用受信回路を得る。
【解決手段】受信光及び局部発振光の差周波数のビート信号を出力する光ヘテロダイン受信機7と、光ヘテロダイン受信機7の信号を標本化するAD変換器13と、各々のカットオフ周波数がナイキスト周波数の整数倍である複数の帯域通過フィルタ12と、AD変換器13で標本化された時系列信号を時間ゲート毎にフーリエ変換して各パワースペクトルのピーク周波数を算出する周波数分析部14と、自機速度情報出力部8からの速度情報に基づき、複数の帯域通過フィルタ12の中から所定の帯域通過フィルタを選択して切り替えるとともに、前記ピーク周波数に基づき、風速によるドップラーシフト周波数を算出するフィルタ条件判定処理部9と、前記風速によるドップラーシフト周波数に基づき、風速を算出する風速算出部15とを設けた。
(もっと読む)
レーダ装置
【課題】よりS/N比のよいレーダ装置を提供する。
【解決手段】所定の照射角度範囲にレーザ光を順次照射する送信部10と、レーザ光が物体に反射した反射光を受光するために複数の受光素子が配列されている受光素子アレイ34と、反射光を受光素子アレイに集光させる受光レンズ32と、受光素子アレイ34を構成する複数の受光素子のうち、送信部10から照射されるレーザ光の照射角度に対応した受光素子を検出可能状態とする演算部60とを備え、受光素子アレイ34の受光信号に基づいて物体検出を行うレーダ装置1であって、受光レンズ32として、光軸が互いに異なる2つの受光レンズ32A、32Bを備える。
(もっと読む)
レーザレーダ装置
【課題】CW変調信号で強度変調されたレーザ光信号を送受して距離計測を行うとともに、先見情報を利用して1周期ごとの不確定性を除去することにより、正確な距離を検出可能なレーザレーダ装置を得る。
【解決手段】GPS10と、INS11と、地図情報保存部12と、光源1と、光源1からのレーザ光信号に対してCW変調信号により強度変調をかける光強度変調器2と、強度変調されたレーザ光信号30aをターゲット30に向けて送信するとともに、ターゲット30からの散乱光信号30bを受信する送信光学系5および受信光学系6と、散乱光信号30bを強度検波して電気信号に変換する光受信機7と、CW変調信号と受信信号との位相差Δφを検出する位相検波器8と、位相差Δφと先見情報とに基づいて、ターゲット30までの距離Lを検出する距離検出器9とを備えている。
(もっと読む)
光波レーダ装置
【課題】本発明は、望遠鏡の交換をすることなく、視線方向への計測可能範囲を比較的広くすることができるとともに、計測作業の円滑化を図ることができる光波レーダ装置を提供する。
【解決手段】第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれを略平行化する。また、第1及び第2コリメータ光学系106A,106Bは、第1及び第2送信光A4,A5のそれぞれのビーム径及び集光距離を調整可能となっている。第1コリメータ光学系106A及び第2コリメータ光学系106Bを経た第1送信光A4及び第2送信光A5は、偏光合成分離手段108によって、互いの直交偏光成分が合成される。直交2偏光の送信光は、送受信同軸の望遠鏡109によって、大気中の所望の目標へ向けて照射される。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、高い時間的精度で距離測定するための、コスト的に有利な可能性を提供する。
【解決手段】10MHzのマスターサイクルから、周波数f1=400MHzないし周波数f2=410MHzの分割サイクルをつくる。差分周期の任意の倍数をつくり出すために、時間ベースユニットが、周波数f2のn番目の周期及び周波数f1のm番目の周期から成るペアを選ぶ。各ペアの位置はマスターサイクルに対して固定されており、例えばn=2及びm=6が4/f2+6ΔTの時間インターバルに相当し、1/f2=41ΔTである。そこでは、100ns経過して同期が起きるたびにカウンタがリセットされ、ペアの番号付けが最初から始まる。二つの周波数f1及び周波数f2に基づいて、検知区分よりもはるかに細かい時間ベースを使用できる。
(もっと読む)
61 - 80 / 231
[ Back to top ]