
Fターム[5J084CA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | サンプリング、A/D変換、D/A変換 (231)
Fターム[5J084CA49]に分類される特許
21 - 40 / 231
レーザレーダ
【課題】迷光が入射される場合にも、回路規模の増大を招くことなく、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
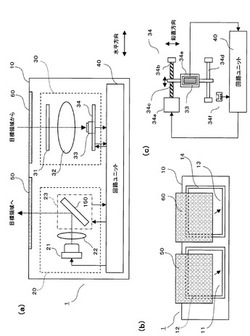
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光の反射光を受光する光検出器33と、光検出器33を移動させる光検出器駆動部34を有する。光検出器駆動部34は、光検出器33を反射光の入射位置に移動させる。光検出器33を反射光の入射位置に移動させることにより、複数の光検出器および回路部を用いずに、反射光を精度よく検出することができる。
(もっと読む)
ビーム照射装置

【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
光波距離計
【課題】フィルタ位置設定時間が長引くことなく、測距時間も短縮できる光波距離計の提供。
【解決手段】測距光路23間に受光光量調節用の可変濃度フィルタ25が配置された位相差方式の光波距離計において、測定ごとに測距値、可変濃度フィルタ25のフィルタ位置、測距信号の信号棄却率を記憶手段51に記憶しておき、測定時には演算処理部50で、測距信号のサンプリングから算出したサンプル測距値と記憶手段51内の測距値とを比較して、差異が1m以下であるときは、その中で最も閉じられたフィルタ位置に可変濃度フィルタ25を設定し、さらに該フィルタ位置での信号棄却率が0%ならそのフィルタ位置のまま、棄却率が0%でないときはそのフィルタ位置よりも若干濃度を濃くして測距を開始するフィルタ位置調節手段を設けた。
フィルタ位置調節は数回で済み、最適なフィルタ位置に決まるので信号棄却率が下がり測距回数を減らせるため、結果的に測距時間が短縮できる。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から得られるランレングス度数分布と幾何分布との一致度から、入力信号が有効か否かを判定する有効性判定部103とを備える。有効性判定部103は、ランレングスを測定するサンプリングクロックの判定期間中の総数をNsampとしたとき、判定期間中の総度数とNsamp/2との比、あるいは判定期間中の階級値1の度数とNsamp/4との比により、入力信号が有効か否かを判定する。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して所定領域内の物体を特定する手段とを備える、車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、対応画像上の所定物体に対する所定領域の位置ずれ方向が常に同一方向である場合にレーダまたはカメラの光軸ずれがあると判断し、所定領域の位置ずれ方向が所定物体の移動方向と逆方向である場合にレーダとカメラの同期ずれがあると判断する判断手段と、を有する。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
物理情報取得装置、固体撮像装置、物理情報取得方法
【課題】別光源から発せられた光に由来する情報を取得する際に、通常光源に起因する外乱ノイズの影響を緩和する。
【解決手段】電磁波エネルギレベルが他の波長よりも低い特定波長と対応した波長の特定波長波を物体に照射し、物体で反射した特定波長波を固体撮像素子314で検知し、得られた検知情報に基づき特定波長波に由来する情報を取得する。特定波長を中心とする狭帯域のバンドパス特性を持つ光学バンドパスフィルタ502を撮像光学経路上に配置する。特定波長波の物体反射光を検知すれば特定波長成分が通常光源の成分に埋もれずに検知される。特定波長波を物体に照射したときとしないときの各検知情報を比較して通常光源に起因する外乱ノイズの影響が緩和された特定波長波に由来する情報を取得する。光学バンドパスフィルタ502を併用すれば、特定波長成分だけを検知でき、通常光源の光量が強い場合でもその影響を受けず、飽和の問題を回避できる。
(もっと読む)
光波距離計
【課題】測距光の変調周波数を上げることなく測定精度を上げることができる光波距離計を提供する。
【解決手段】変調された可視測距光(L1)を出射する可視発光素子(108)と、可視測距光を受光して電気信号を発生する可視受光素子(109)と、可視受光素子からの電気信号で変調された赤外線等の非可視測距光(l2)を出射する非可視発光素子(114)と、非可視測距光を受光して電気信号を発生する非可視受光素子(115)とを備える。
(もっと読む)
センサー系及びその動作方法
【課題】受光面積、受光量、感度、光電荷の伝送効率、正確度を向上し、チップ上の占有面積を低減できるセンサー系を提供する。
【解決手段】本センサー系は、半導体基板上に形成され、それぞれが、第1フォトゲートと第2フォトゲートとを含む複数のフォトゲート対と、半導体基板内に形成された第1共有フローティングディフュージョン領域と、半導体基板上に形成された複数の第1伝送トランジスタと、を含む。複数の第1伝送トランジスタのそれぞれは、第1制御信号に応答して、複数のフォトゲート対のそれぞれの第1フォトゲート下に形成された複数の電荷を第1共有フローティングディフュージョン領域に伝送する。
(もっと読む)
光波距離測定装置
【課題】測定対象物の画像データと画素毎の距離データが得られる様にした光波距離測定装置を提供する。
【解決手段】測距光を変調して測定対象物に照射する投光部1と、測定対象物からの反射測距光を受光する受光部6と、受光信号を記憶する信号処理部7と、前記受光部及び前記信号処理部を制御して受光信号を取得する信号処理制御9と、受光信号に基づき測定対象物迄の距離を演算する演算処理器8とを有し、前記受光部は、所定の配列で配置された複数の画素11と、各画素からの受光信号を蓄積し、1周期を所定数分割した内の1分割分の受光量を検出し、検出結果を時系列に出力する出力部15とを有し、前記信号処理制御部は、一周波毎に受光量を検出する分割部分の位置を順次変更し、前記演算処理器は、少なくとも1周期分の検出結果に基づき一周波分の波形を演算すると共に、照射した前記測距光に対する前記波形の位相差を求め、該位相差より距離を演算する。
(もっと読む)
ピクセルアレイと記憶アレイを別個に備える復調センサ
【課題】ピクセルの開口率および画像品質を犠牲にすることなくピクセルサイズを縮小可能であり、各ピクセルの信号ごとに追加の後処理回路を所望に組み込むことができ、モーションアーチファクトを最小限に抑えることのできる復調センサを提供する。
【解決手段】複数のピクセル210を含み、各ピクセル210が少なくとも2個のサンプルを生成するピクセルアレイ110と、複数の記憶要素310を含み、各記憶要素310が複数のピクセル210のうちの対応する1つから少なくとも2個のサンプルを受け取る記憶アレイ150とを備える。
(もっと読む)
21 - 40 / 231
[ Back to top ]