
Fターム[5J084CA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | サンプリング、A/D変換、D/A変換 (231)
Fターム[5J084CA49]に分類される特許
161 - 180 / 231
センサシステム
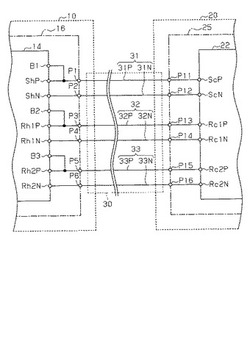
【課題】ヘッド‐コントローラ間を接続するケーブルの線数を減少させることが可能な変位センサを提供すること。
【解決手段】制御部14と通信部22とを信号線31〜33により接続し、LVTTLレベルのブート信号を通信部22から制御部14に送信して該制御部14の回路を設定し、制御部14からLVDS方式により受光データを通信部22に送信するようにした。
(もっと読む)
変位センサ

【課題】複数の波形を表示することが可能な変位センサを提供すること。
【解決手段】変位センサはコントローラ10とヘッド20aとを備え、コントローラ20にはコンソール30が接続されている。それぞれ異なる複数の特定のスキャン動作における、少なくとも受光量がピークとなる画素位置と受光量をコントローラ10の第一の記憶部に記憶させるCPUと、を備える。また、CPUは、スキャン動作を行なうごとに、少なくとも受光量がピークとなる画素位置と受光量をコンソール30の表示画面に更新表示させるとともに、コントローラ10の第1の記憶部に記憶される少なくとも受光量がピークとなる画素位置と受光量を表示する。
(もっと読む)
画像撮像装置及び距離測定方法
【課題】光が照射された被写体から得られる出射光を撮影し、被写体の奥行き距離を簡便に測定することのできる画像撮像装置及び距離測定方法を提供する。
【解決手段】第1の波長を有し、光軸と垂直な面において第1の強度分布を有する第1の照射光と、第1の波長とは異なる第2及び第3の波長を有し、光軸と垂直な面において第1の強度分布とは異なる第2の強度分布を有する第2の照射光とを、同時に被写体に照射する照射部と、被写体から得られる出射光から、第1の波長を有する第1の出射光と、第2の波長を有する第2の出射光と、第3の波長を有する第3の出射光とを光学的に分離する分光部と、それぞれの強度を撮像及び検出する撮像部及び光強度検出部と、第1、第2及び第3の出射光の強度に基づいて被写体までの奥行き距離を算出する奥行き距離算出部とを備えた。これにより、被写体の奥行き距離を簡便に測定することができる。
(もっと読む)
走査式測距装置
【課題】測定対象空間に死角が生じることなく、周囲360度に亘って高精度な距離測定を実現し得る走査式測距装置を提供する。
【解決手段】パルス状の測定光を出力する投光部3と、前記投光部3から出力された測定光を測定対象空間に向けて走査する走査部4と、前記測定対象空間に存在する測定対象物からの反射光を検出する受光部5を備え、前記受光部5で検出された前記反射光に基づいて前記測定対象物までの距離を測定する走査式測距装置であって、前記測定光の一部を基準光として一定の光路長で前記受光部5に導く光ファイバ6を有する基準光路を備えると共に、前記測定光の出力タイミングに同期して前記受光部5により検出される前記基準光と前記反射光の検出時間差に基づいて前記測定対象物までの距離を算出する演算部を備える。
(もっと読む)
測距装置
【課題】微弱な反射光も正確に検出するべく増幅回路のゲインを大きくしながらも、強い反射光量に対して過飽和状態に到ることなく、安価な回路で安定に動作し精度の高い距離補正が可能な測距装置を提供する。
【解決手段】測定対象物に向けてパルス状の測定光を出力する光源と、測定対象物からの反射光を検出する受光部と、測定光の出力タイミングから受光部による反射光の検出タイミングまでの遅延時間から測定対象物までの距離を算出する演算部を備え、反射光を光電変換するフォトダイオードPDと、フォトダイオードPDと直列接続してフォトダイオードPDに生じる光電流をクランプするダイオードDと、フォトダイオードPDの出力を増幅する増幅回路50を備えて受光部5を構成するとともに、増幅回路50の出力を積分する積分処理部を備え、積分処理部の出力に基づいて距離を補正する距離補正部を備える。
(もっと読む)
車載用のレーダ装置に用いるスキャナ
【課題】装置からレーザ光が照射される前に走査レンズの異常を確認し、異常が認められた場合にはシステムを停止させることができ、発光輝度の劣化や寿命、消費電流等への影響を改善した車載用のレーダ装置に用いるスキャナを提供することである。
【解決手段】電流によりLD28から光線が発生され、走査レンズ40により該光線の方向が変えられる。走査レンズ40の位置はPSD25a及び25bで検出される。走査レンズ40は、アクチュエータ部材21によって移動されるもので、少なくとも、該アクチュエータ部材21により移動した上記走査レンズ40の位置をPSD25a及び25bにより検出した情報を基に、上記アクチュエータ部材21の異常がCPU20によって検出される。
(もっと読む)
円筒形反射器を利用した車両用レーザーレーダー及びその制御方法
【課題】車両の走行振動にも影響を受けずにレーダーのレーザースキャン動作がより安定的に行われ、遠距離及び近距離の検出が交互に行われる円筒形反射器を利用した車両用レーザーレーダー及びその制御方法を提供する。
【解決手段】本発明は、円筒形ボディ及びその円筒形ボディの内径面においてその円周方向に沿って装着される多数の反射ミラーとで構成される円筒形反射器と、前記円筒形反射器を回転させる回転駆動手段と、前記円筒形反射器の中空ホールに配置されるレーザー受光部と、前記円筒形反射器の後部側で対称に配置される左/右側レーザー発光部と、前記円筒形反射器の回転角度を検出する位置検出部と、前記レーザー受光部及び位置検出部の信号を受信する制御部、及び、前記位置検出部の検出信号によってレーザーの変調周波数を調整する変調回路部と、から構成されることを特徴とする。
(もっと読む)
レーダ装置
【課題】自車両、及び先行車両の走行状況に適した相対速度のフィルタの時定数を設定する。
【解決手段】カーブ付近等の自車両が加減速する可能性の高い道路を通過する場合に応答要求度を設定し(ステップS310)、相対速度の絶対値に応じて応答要求度を設定し(ステップS320)、車間時間と設定車間時間との比に応じて応答要求度を設定し(ステップS330)、設定車間時間が変更される場合に応答要求度を設定し(ステップS340)、車間距離制御のターゲットとすべき先行車両が変更される場合に応答要求度を設定する(ステップS350)。このように、自車両、又は先行車両が加減速する可能性を判断することで、自車両、及び先行車両の走行状況に適した相対速度のフィルタの時定数を設定することができる。
(もっと読む)
光学距離測定方法及びそれを用いた光学距離測定装置
対象物までの距離を導出するために、下部と上部のダイナミックレンジの検出に異なる検出方法を同一光信号(6)に対して同時に用いる、少なくとも一つの光信号の少なくとも一つの発光と対象物によって散乱された光信号(6)の一つの検出を有する光電気距離測定法において、上部ダイナミックレンジが閾値法によって記録され、下部ダイナミックレンジが後方散乱された光信号(6)の同定と一時的な位置の確認のための信号走査によって記録されることを特徴とする。 (もっと読む)
移動時間原理による光電式非接触距離測定の方法および装置
本発明は、伝搬時間原理に従って非接触様式で距離を光電式に測定する方法において、センサユニットからの物体の距離が、開始信号と、物体によって反射された光測定パルスから得られるエコー信号との時間差から求められる方法に関する。時間差を求めるために、次の、a)開始信号およびエコー信号をデジタルクロックと比較することにより、デジタル未処理値が得られるステップと、b)開始信号とデジタル未処理信号の始まりとの初期時間差、およびエコー信号とデジタル未処理信号の終わりとの最終時間差が、少なくとも2つの細密補間回路を用いて求められるステップと、c)アナログ信号に対応する初期差または最終時間差が、細密補間回路に導入されて、デジタル初期時間差またはデジタル最終時間差に変換されるステップとが実施される。前記方法は、細密補間回路を自動的に較正するために、ステップa)〜c)に従って複数回の測定が実施され、また特定の値間隔内で初期時間差および最終時間差について値が測定される可能性に対して均一な分布であると考えることによって、細密補間回路の特性線の非直線性および/またはドリフトの補正が計算されることを特徴とする。本発明は、伝搬時間原理に従って非接触様式で距離を光電式に測定するための装置にも関する。  (もっと読む)
(もっと読む)
レーダ装置
【課題】物体からの反射レーザ光によって生じる反射信号を含む受光信号を積算することによって、その積算信号に含まれる反射信号が飽和しても、物体までの距離に対応する反射信号のピークを正しく算出する。
【解決手段】積算信号の位相を所定のずらし時間Δdだけ遅らせた位相変化信号を生成して、積算信号との差分に相当する差分信号を算出する。すると、積算信号における飽和している波形部分が、位相変化信号において飽和している波形部分によって消滅する。その結果、差分信号には、積算信号において反射信号が飽和に向かう立上りを立上り波形とするピーク波形が現れる。そして、この立上り波形から一定時間経過した時点が、物体の位置に対応するので、このピーク波形から対象物体の位置を高精度に求めることができるようになる。
(もっと読む)
コヒーレントライダ装置
【課題】集光効果を利用した高いS/N比での計測を行うとともに、複数の集光距離に送信光を高速に集光するコヒーレントライダ装置を提供する。
【解決手段】コヒーレントライダ装置は、1つまたは2つの波長を有する光信号の一部からなる送信光を空間中に放射し該空間中の散乱ターゲットからの散乱光を受信する光アンテナと、上記光信号の一部からなるローカル光と上記散乱光とをヘテロダイン検波する光受信機と、を備えるコヒーレントライダ装置において、上記光アンテナは、上記送信光を集光ポイントに集光する集光レンズと、上記送信光が放射される出射端と上記集光レンズとの間に配置され、回転するとき円周上を上記送信光が通過し、該円周上の厚さが場所により異なる回転板と、を有する。
(もっと読む)
光照射装置
【課題】複雑な構成を取らなくとも、PSDの暗電流を検出してこれをキャンセルし、信頼性の高い光照射装置を提供すること。
【解決手段】アクチュエータ4に搭載されたLED5における暗電流を検出する際に、LED5の発光強度を少なくとも2段階に変化させ、それぞれの発光強度に対してPSD6より流れる電流と、それぞれの発光強度においてLED5に流した電流とから、PSD6の暗電流を算出すると共に、この暗電流の値を保持し、アクチュエータ4の移動量を検出する際にPSD6に流れる総電流から保持しておいた暗電流の値を差し引くことにより、暗電流をキャンセルする。
(もっと読む)
波形観測方法と波形観測装置
【課題】同期検波用遅延器を使用せずに測定対象からの反射波を観測することのできる波形観測装置を提供する。
【解決手段】進行波を所定の周期で繰り返し送出する送信器102と、測定対象Mで反射する反射波を受波する受信器103と、反射波の振幅値をその反射波を受波する毎に記憶していく反射波形観測手段104とを移動体に設けた波形観測装置であって、前記移動体と測定対象Mとの相対速度を検出する相対速度検出手段106と、測定対象Mと受信器103との間の伝播経路の経路変化量を、前記相対速度度に基づいて受信器103が反射波を受波する毎に算出する経路変化量算出手段107と、この経路変化量算出手段107が算出する経路変化量に基づいて、前記反射波のサンプリング点間隔を算出するサンプリング周期算出手段108とを備え、このサンプリング周期算出手段108が算出したサンプリング点間隔と、このサンプリング点間隔に対応する前記振幅値とから反射波の波形を観測する。
(もっと読む)
レーダ装置
【課題】ダイナミックレンジの広い反射光であっても高精度に物標位置を計測することができるレーダ装置を提供する。
【解決手段】レーザ光を発生する投光部と、入射光を信号に変換する第1受光部と、投光部が発生したレーザ光をビーム化して探査方向に照射するとともに、探査方向からの反射光を受光して前記受光部に導く光学系を有する。この光学系にMEMSミラーデバイスを用い、MEMSミラー中に1つまたは複数のフォトダイオードを埋め込む。このフォトダイオードで前記第1受光部よりも高輝度の反射光に対して感度領域を有する第2受光部を構成し、第1受光部の出力信号および第2受光部の出力信号を合成出力する合成部を備える。
(もっと読む)
ビーム照射装置
【課題】消費電力の抑制と半導体レーザの長寿命化を図りつつ、レーザ光の照射位置を円滑にモニタできるビーム照射装置を提供する。
【解決手段】半導体レーザ100は、パルス発光間の期間において、レーザ発振閾値以下の電流にて自然放出光を発光する。自然放出光は、ビームスプリッタ400によって分離され、PSD600に受光される。PSD600からの出力電流は、I/V変換回路60にて電圧信号に変換される。PSD信号処理回路70は、この電圧信号をもとに、PSD受光面上における分離光の受光位置に応じた位置電圧信号を出力する。ADC80は、自然放出光の発光期間にて位置電圧信号をサンプリングし、サンプル値をDSP10に出力する。DSP10は、このサンプル値に基づいて、各パルス発光タイミングにおけるレーザ光の照射位置を検出する。
(もっと読む)
測距方法および測距装置
【課題】トリガ信号と受光信号に基づいて測定対象物までの距離を高精度に計測する。
【解決手段】制御部6でトリガ信号S1を生成する。このトリガ信号S1を起点として投光部2からパルス光S4を測定対象物に対して出射し、測定対象物で反射したパルス光S3を受光部3で受光して受光信号S4を生成する。合成回路4でトリガ信号S1と受光信号S4を単一の時間軸に沿って連続する一の信号に合成しなる合成信号S5を生成する。この合成信号S4におけるトリガ信号S1および受光信号S4の時間軸上での位置に基づいて測定対象物までの距離を演算する。
(もっと読む)
ビーム照射装置
【課題】構成の複雑化とレーザ光の利用効率の低下を同時に解消し得るビーム照射装置を提供することを課題とする。
【解決手段】走査ミラー201を2次元駆動してレーザ光を水平方向および垂直方向にスキャンさせる。走査ミラー201のレーザ光入射面は、これによって反射されたレーザ光を平行光よりやや拡散した状態に変換するよう設計されており、また、スキャン動作時に走査ミラー201がP−P’方向およびY軸方向に変位しても、レーザ光の拡散状態が略変化しないような曲面に設計されている。したがって、走査ミラー201によって反射されたレーザ光は、アクチュエータ200の駆動に応じて、拡散状態が殆ど変わらない状態で、目標領域内をスキャンする。レーザ光は、走査ミラー201に反射されても殆どパワー減衰しない。また、一つの走査ミラー201を駆動すればよいから構成の簡素化が図られる。
(もっと読む)
物体検出装置
【課題】環境光を含む光を受光する環境であっても、環境光の影響を低減した正確な検出を可能とする。
【解決手段】発光器から射出され物体で反射されてフォトダイオード(PD)20で受光された光に応じてPD20から出力される受光信号を、蓄積部26に電荷として蓄積することを、発光器の発光タイミングに対する位相が互いに異なる複数種の電荷蓄積期間に行って物体との距離の検出や距離画像の出力を行うにあたり、発光器が発光していない状態での電荷蓄積量又は各位相における電荷蓄積量の最小値に基づいてPD20に入射される環境光に対応する平均充電電流を演算し、受光信号のうちの平均充電電流分が抵抗36を介して放電されるようにスイッチ部38のスイッチを切り替える。
(もっと読む)
距離測定装置
【課題】被測定物の測定位置の変動に対応でき、測定対象部分を的確に測定することができる距離測定装置を提供する。
【解決手段】コントローラ3に切替スイッチ15を設け、該切替スイッチ15によりCCD6で得た反射光の受光分布の受光ピーク位置と被測定物の表裏面の位置とを対応付ける基準がセンサヘッド2(投光素子5)の近接側か離間側かのいずれかから選択可能に構成した。
(もっと読む)
161 - 180 / 231
[ Back to top ]