
Fターム[5J084CA55]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | ゲート回路 (27)
Fターム[5J084CA55]に分類される特許
1 - 20 / 27
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
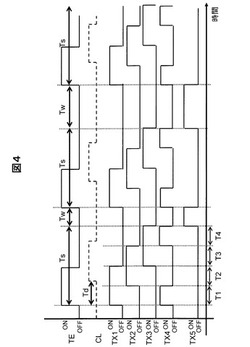
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
レーザレーダ装置

【課題】遠距離の監視範囲や遠近差の大きな監視範囲であっても、精度よく監視範囲内における物体を検出可能なレーザレーダ装置を提供する。
【解決手段】レーザ光Liを投光する投光部11と、レーザ光Liを垂直方向Vに走査させる垂直スキャナ12と、レーザ光Liを水平方向Hに走査させる水平スキャナ13と、レーザ光Liの反射光Lrを受光して受光情報d4を発信する受光部14と、受光情報d4から物体Mの距離Lpを算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、監視範囲Sにおける遠近距離に応じてレーザ光Liの透過率δを調整する強度調整フィルタ17と、を有し、強度調整フィルタ17は、遠距離に照射するレーザ光Liの透過率δを高くし、近距離に照射するレーザ光Liの透過率δを低くするように構成されている。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
時間計測装置およびセンサ装置
【課題】計測時間の計測精度の低下を抑制し得る時間計測装置およびセンサ装置を提供する。
【解決手段】レーザレーダ装置1に採用される制御回路70の時間計測回路71では、計測時間Tが、デジタル値D1およびデジタル値D2の比率と基準時間Toとに基づいて求められる。さらに、比率演算時の時間分解能Tr1が、比率演算時の演算誤差e1に等しくなるように設定されて、リング遅延パルス発生回路81の遅延素子(ゲートディレイ)の時間分解能よりも細かく設定される。
(もっと読む)
振動振幅計測装置および振動振幅計測方法
【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
距離センサ及び距離画像センサ
【課題】開口率の向上を図ることができ、S/N比の良い距離画像を得ることができる距離画像センサを提供する。
【解決手段】距離画像センサRSは、1次元状に配置された複数のユニットからなる撮像領域を半導体基板1上に備え、ユニットから出力される電荷量に基づいて、距離画像を得る。1つのユニットは、光感応領域と、第1及び第2長辺L1,L2の対向方向でフォトゲート電極PGを挟んで対向する二対の第3半導体領域9a,9bと、第3半導体領域9a,9bとフォトゲート電極PGとの間に設けられる第1及び第2転送電極TX1,TX2と、第1及び第2長辺L1,L2の対向方向でフォトゲート電極PGを挟んで対向し且つ第3半導体領域9a,9bの間に配置される第4半導体領域11a,11bと、第4半導体領域11a,11bとフォトゲート電極PGとの間に設けられる第3転送電極TX3とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】ある期間に観測される干渉波形の数を基に物理量を算出するバッチ処理方式と個々の干渉波形の周期を基に物理量を算出する逐次処理方式とを適宜切り替え可能にする。
【解決手段】物理量センサは、物理量の算出をバッチ処理方式で行う第1の演算部9と、物理量の算出を逐次処理方式で行う第2の演算部10と、信号抽出部8が計測した個々の干渉波形の周期から干渉波形の単位時間当たりの数を算出し、この数の変化の周波数をfsig、半導体レーザ1の発振波長変調の搬送波の周波数をfcarとしたとき、fsig>fcar/A(Aは1より大きい所定の定数)が成立する場合、第2の演算部10の算出結果を採用すべきと判定し、fsig>fcar/Aが成立しない場合、第1の演算部9の算出結果を採用すべきと判定する切替部12とを有する。
(もっと読む)
光電変換素子、受光装置、受光システム及び測距装置
【課題】光電変換によって得られた光電子を所望の領域に高速に移動させ、集積させるようにして、測距装置や受光システム等を実現できるようにする。
【解決手段】光を検知して光電子に変換する第1光電変換素子10Aは、半導体基体12上に絶縁体を介して形成された第1電極16aを有する1つの第1MOSダイオード18aと、半導体基体12上に絶縁体を介して形成された第2電極16bを有する複数の第2MOSダイオード18bとを有する。第1MOSダイオード18aの第1電極16aは、上面から見たとき、1つの電極部位20から複数の枝分かれ部位22に分岐配列されたくし歯形状を有し、第2MOSダイオード18bの各第2電極16bは、上面から見たとき、第1電極16aとは分離され、且つ、第1電極16aにおける複数の枝分かれ部位22間にそれぞれ入れ子状に配置されている。
(もっと読む)
光飛行時間型距離画像センサの制御方法およびそのシステム
【課題】明るい背景光の受光による固体撮像素子の電荷蓄積部の飽和を防止することができるとともに、取得される距離画像の距離精度に悪影響が及ばないようにする。
【解決手段】光電変換素子と、光電変換素子ごとに設けられて電荷を蓄積可能な複数の電荷蓄積部と、変調光に同期して電荷を複数の電荷蓄積部に振り分けて蓄積させる振り分け手段と、複数の電荷蓄積部とそれぞれ導通可能な複数の容量と、複数の電荷蓄積部と複数の容量との導通状態を制御する制御手段とを有する固体撮像素子により、画素を構成した光飛行時間型距離画像センサの制御方法であって、振り分け手段により複数の電荷蓄積部に電荷を振り分ける光蓄積時間において、住意の時間配分で制御手段により制御される導通状態を切り替えることにより、変調光による電荷を複数の電荷蓄積部に蓄積させたまま、変調光以外の光による電荷を複数の電荷蓄積部から除去する。
(もっと読む)
デイジーチェーン構成の電荷格納領域を有する復調ピクセルおよびそれを操作する方法
【課題】高いサンプリング周波数と比較的多数のサンプルの両方を満足することができる、復調ピクセルアーキテクチャを提供する。
【解決手段】感光性領域110であって、その領域では入射光が光電荷に変換され、この感光性領域110内の横方向のドリフト電界116が光電荷をピックアップ点112に移動させる、感光性領域110と、ピックアップ点112において感光性領域110から光電荷を受け取る電荷格納部154のチェーン152であって、互いに異なる時間区間にそれぞれ対応する光電荷はチェーン152の連続した電荷格納部154を通して伝達される、チェーン152とを備える。
(もっと読む)
監視装置
【課題】監視対象だけでなく、その周辺の様子も監視することの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が監視対象に到達し、監視対象により反射された反射光が到達するタイミングに合わせて高速ゲート装置122を開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、奥行き方向における前記監視対象の前後の情報を取得するタイミングで高速ゲート装置122を開閉させる監視付随制御を行う監視装置を提供する。
(もっと読む)
監視装置
【課題】測距装置を併設することなく、監視を続けながら測距を行うことの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、物体の距離情報を取得するタイミングでシャッタを開閉させる測距制御を行う監視装置を提供する。
(もっと読む)
レーザレーダ装置および輸送機器
【課題】処理すべきデータの量を増大させることなく対象物までの距離を高精度で測定することが可能なレーザレーダ装置およびそれを備えた輸送機器を提供することである。
【解決手段】シリアルパラレル変換器140は、サンプルデータSMをnビットのパラレルデータPDに順次変換する。カウンタ回路150は、基本クロック信号CKの周期のn倍の周期を有するパラレルクロック信号PCKに基づいて、連続する0ブロックの数をカウントし、カウント結果を示すカウンタ出力信号CUを生成する。処理部180は、発射光の受光時におけるパラレルデータPD、反射光の受光時におけるパラレルデータPDおよび発射光の受光時と反射光の受光時との間での0ブロックの数を記憶部160に記憶し、記憶部160に記憶されたパラレルデータPDおよびカウンタ出力信号CUに基づいて距離を算出し、算出結果を距離信号DSとして出力する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の高速検知と物理量の高分解能計測とを両立させる。
【解決手段】物理量センサは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光とその戻り光とを受光するフォトダイオード2と、フォトダイオード2の出力信号に含まれる、半導体レーザから放射されたレーザ光とその戻り光との自己結合効果によって生じる干渉波形の周期を検出し、反射壁面10による干渉波形の周期と異なる周期の干渉波形が所定の条件を満たすときに、レーザ光の放射方向に物体12が存在すると判定する物体検知装置11と、フォトダイオード2の出力信号に含まれる干渉の情報から物体12の物理量を計測する計測手段(電流−電圧変換増幅器5、フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
駆動回路
【課題】負荷のリアクタンス成分の変動によって負荷を駆動するための出力の立上り時間が変動した場合であっても負荷の動作が変動するのを抑制する。
【解決手段】負荷Aの容量値が変動した場合、駆動回路1の傾き調整回路6は、電流制御回路50,51のpMOS52及びnMOS53に印加するゲート電圧を調整し、pMOS52及びnMOS53の各ソース−ドレイン間に流れる電流を調整する。つまり、出力ドライバ4のCMOS回路40を構成するpMOS41及びnMOS42のそれぞれのオン時にpMOS41及びnMOS42の各ソース−ドレイン間に流れる電流を調整する。これにより、出力ドライバ4と負荷Aとの間に流れる電流を制御し、負荷Aの容量成分を充放電させる時間を制御するため、負荷Aの駆動電圧の立上り及び立下りの傾きを補正し、上記駆動電圧の立上り時間及び立下り時間を一定時間にする。
(もっと読む)
距離・速度計および距離・速度計測方法
【課題】自己結合型のレーザ計測器の利点を活かしつつ、測定対象との距離と測定対象の速度を外乱光の影響を除去して計測する。
【解決手段】距離・速度計は、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間が交互に存在し、かつ発振波形の周波数が周期毎に変化するように、半導体レーザ1の発振波長を変調するレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2と、フォトダイオード2の出力に含まれる外乱光の成分を除去し、除去後の出力に含まれる干渉の情報を発振波形の周波数が基準周波数のときの値に換算し、半導体レーザ1の出力光と測定対象12からの戻り光との干渉に基づくパルスの数を求める計数手段5〜8と、半導体レーザ1の最小発振波長と最大発振波長と計数結果から測定対象11との距離及び測定対象11の速度を算出する演算手段9とを有する。
(もっと読む)
光波距離測定方法、距離測定プログラム及び距離測定システム
【課題】同時に多数の測定対象物について、多数回の距離測定を可能とし、又近接した測定対象物についても距離測定を可能とする。
【解決手段】測距光として所定の広がり角を有するパルスレーザ光線を複数の測定対象物11a,11b,11cに向け射出する複数の距離測定装置71と、前記複数の測定対象物についてそれぞれ複数の測距結果に基づき各測定対象物の座標を演算する演算処理装置72とを具備し、前記距離測定装置は、既知点に設置され、所定の広がり角を有するパルスレーザ光線を発する光源部と、1以上の測定対象物からの反射光を受光する受光部と、該受光部からの受光信号を基に前記測定対象物それぞれについての距離を演算する制御演算部とを具備し、前記演算処理装置は各距離測定装置から演算された測定対象物迄の距離データを取得し、該測定対象物それぞれについて複数の距離データ、既知点の位置から測定対象物の座標位置を演算する。
(もっと読む)
光波距離測定方法、距離測定プログラム及び距離測定装置
【課題】同時に多数の測定対象物について、多数回の距離測定を可能とし、又近接した測定対象物についても距離測定を可能とする。
【解決手段】所定の広がり角を有するパルスレーザ光線を発する光源部6と、1以上の測定対象物11からの反射光36′を受光する受光部9と、受光制御回路を有し、前記受光部からの最初の受光信号を基に前記測定対象物についての測定データを取得する測距部32と、前記測距部は前記受光部が1つのパルスレーザ光線で2以上の反射光を受光した場合、1つのパルスレーザ光線で最初に得られる受光信号を検出し、前記制御演算部は少なくとも1回検出した後は検出した受光信号について検出を制限し、制限後は制限した以外の発光後最初に得られる受光信号を検出可能とする様前記受光制御回路を制御し、発光パルス毎に弁別して受光信号を検出し、弁別した受光信号に基づき複数の測定対象物迄の距離を個別に測定する様構成した。
(もっと読む)
1 - 20 / 27
[ Back to top ]